Aruco MarkerMapper
1K+
Downloads

Everyone
info
About this app
Implements the research paper "Mapping and localization from planar markers" published in Pattern Recognition, Volume 73, January 2018, Pages 158-171.
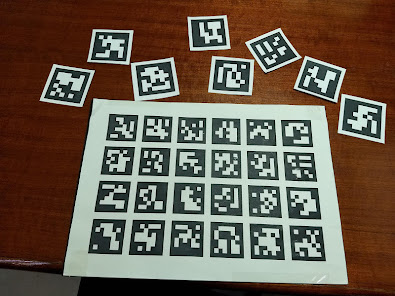
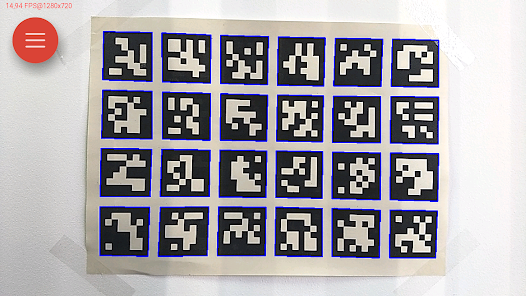
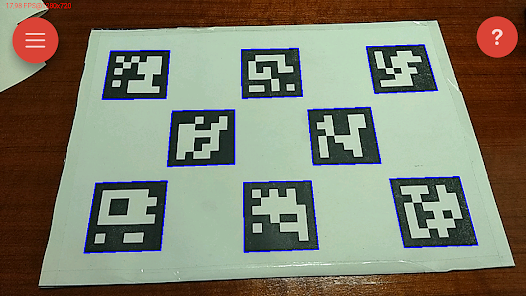
The method can be used for camera localization from squared markers. Place the markers in your environment and use the app to create a map that can be used by your robot.
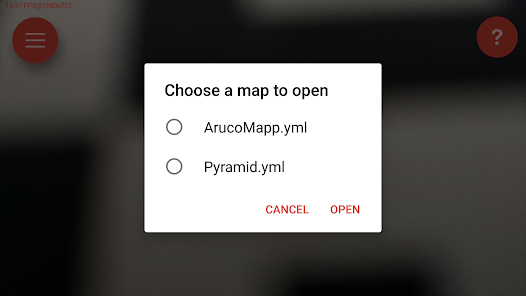
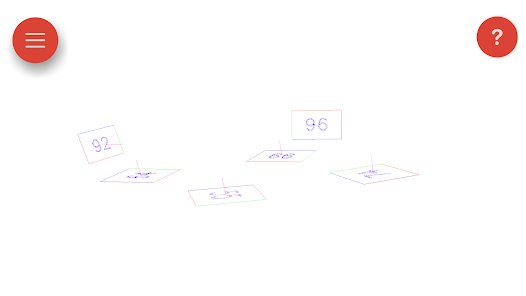
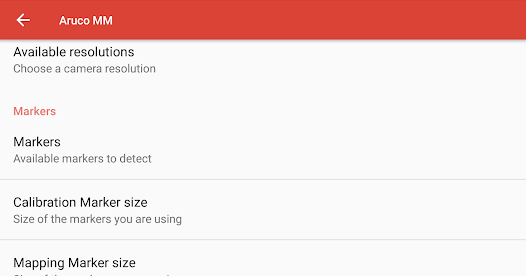
First, you must calibrate the camera. Then, set your markers in the environment and use the app to take pictures of them. The app will generate a 3d reconstruction of the markers. You can visualize the map of markers and send it by email to your self to use it later in another device such as your robot.
The method can be used for camera localization from squared markers. Place the markers in your environment and use the app to create a map that can be used by your robot.
First, you must calibrate the camera. Then, set your markers in the environment and use the app to take pictures of them. The app will generate a 3d reconstruction of the markers. You can visualize the map of markers and send it by email to your self to use it later in another device such as your robot.
Updated on
Safety starts with understanding how developers collect and share your data. Data privacy and security practices may vary based on your use, region, and age. The developer provided this information and may update it over time.

No data shared with third parties
Learn more about how developers declare sharing

No data collected
Learn more about how developers declare collection
What's new
Bug solved of the previous version.