
QGroundControl
4,2star
528 recenzií
50 tis.+
Stiahnuté

Vhodné pre deti od 3 rokov
info



Informácie o aplikácii
QGroundControl poskytuje plnú kontrolu a konfiguráciu letov pre vozidlá poháňané systémom ArduPilot alebo PX4 Pro. Cieľom QGroundControl je zlepšenie jednoduchosti používania pre nových používateľov, ako aj podporu najvyššej kvality pre skúsených používateľov.
Funkcie QGroundControl:
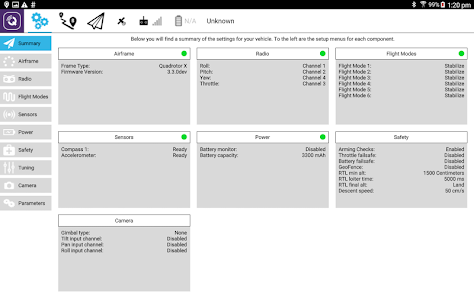
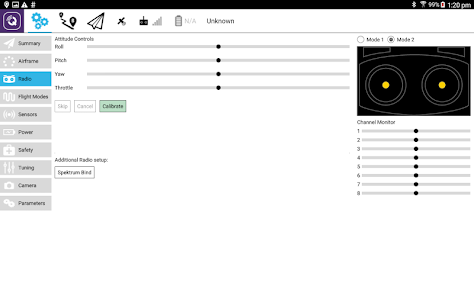
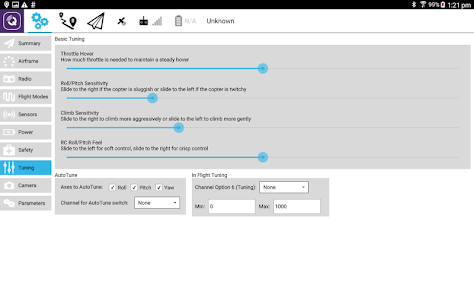
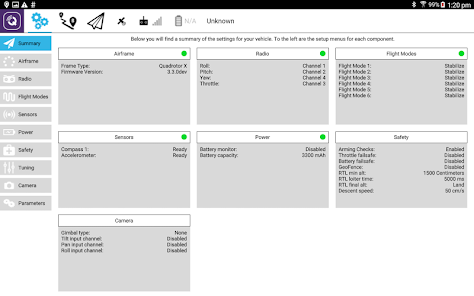
- plná podpora konfigurácie vozidiel s firmwaremi PX4 Pro a ArduPilot (ArduCopter, ArduPlane, ArduRover, ArduSub)
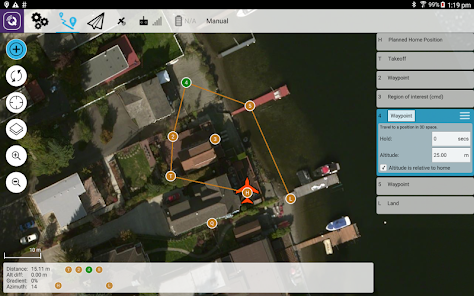
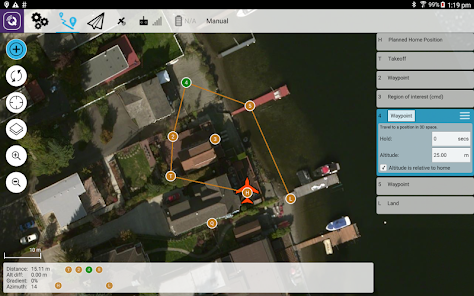
- plánovanie misie pre autonómny let
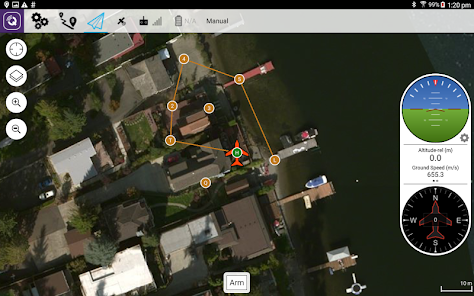
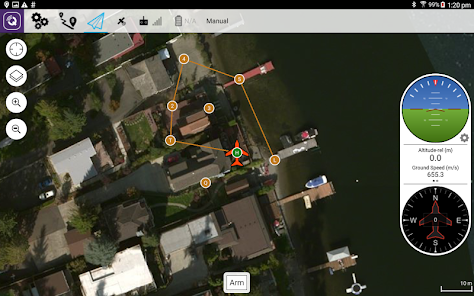
- Zobrazenie letovej mapy zobrazujúcej polohu vozidla, letovú dráhu, body trasy a nástroje vozidla
- Video streaming s prekryvnými displejmi na displeji
- Podpora letu pre akékoľvek vozidlo schopné prevádzky MAVLink
QGroundControl je k dispozícii aj pre systémy Windows, MacOS, Linux a iOS.
Poznámky k vydaniu
Oficiálna stránka QGroundControl
Dokumentácia
Podpora
Funkcie QGroundControl:
- plná podpora konfigurácie vozidiel s firmwaremi PX4 Pro a ArduPilot (ArduCopter, ArduPlane, ArduRover, ArduSub)
- plánovanie misie pre autonómny let
- Zobrazenie letovej mapy zobrazujúcej polohu vozidla, letovú dráhu, body trasy a nástroje vozidla
- Video streaming s prekryvnými displejmi na displeji
- Podpora letu pre akékoľvek vozidlo schopné prevádzky MAVLink
QGroundControl je k dispozícii aj pre systémy Windows, MacOS, Linux a iOS.
Poznámky k vydaniu
Oficiálna stránka QGroundControl
Dokumentácia
Podpora
Aktualizované
Bezpečnosť sa začína porozumením tomu, ako vývojári zhromažďujú a zdieľajú vaše údaje. Postupy zabezpečenia a uchovávania údajov v súkromí sa môžu líšiť v závislosti od používania, regiónu a veku. Tieto informácie poskytol vývojár a môže ich časom aktualizovať.

S tretími stranami nie sú zdieľané žiadne údaje

Neboli zhromaždené žiadne údaje
Hodnotenia a recenzie
4,1
464 recenzií