
Electrical Drives
Sisaldab reklaame
10 tuh+
Allalaadimised

Kõik
info




Rakenduse teave
► Elektrilised ajamid on tööstus- ja automatiseerimisprotsesside lahutamatu osa, eriti kui mootori kiiruse täpset juhtimist on peamine nõue. Lisaks on kõik tänapäevased elektrirongid või vedurite süsteemid elektrilised ajamid. Robotehnika on veel üks peamine valdkond, kus reguleeritavad kiiruseajamid pakuvad täpset kiirust ja positsiooni juhtimist
►ajam töötab ja reguleerib liikuvate objektide kiirust, pöördemomenti ja suunda. Juhid kasutatakse tavaliselt kiiruse või liikumise juhtimise rakenduste jaoks, nagu näiteks tööpingid, transport, robotid, ventilaatorid jms. Elektrimootorite juhtimiseks kasutatavad ajamid on tuntud elektriajamitena.
►Vaadid võivad olla püsiva või muutuva tüübiga. Pideva kiirusega ajamid on muutuva kiirusega toimingute jaoks ebaefektiivsed; Sellistel juhtudel kasutatakse muutuva kiirusega ajamit koormate kasutamiseks mis tahes suurel kiirusel
►Ettevõimelised kiirusajamid on vajalikud erinevate koormuste kiiruse, positsiooni või pöördemomendi täpseks ja pidevaks juhtimiseks. Koos selle peamise funktsiooniga on mitmesuguseid seadmeid reguleeritavate kiirusajamite kasutamine. Mõned neist sisaldavad näiteks
➻ Kõrge efektiivsuse saavutamiseks: Elektrilised ajamid võimaldavad kasutada mitmesuguseid kiirusi millilivatitelt megavatidesse erineva võimsusega, seega on süsteemi üldine maksumus väiksem
Of Mootori töö peatamise või tagasikäigu täpsuse kiiruse suurendamiseks
The Käivitusvoolu juhtimine
➻ Et tagada kaitse
➻ Täiustatud juhtimise seadistamine koos parameetrite variatsiooniga, nagu temperatuur, rõhk, tase jne
【Käesolevas rakenduses käsitletavad teemad on loetletud allpool】
⇢ DC mootor või vahelduvvoolu mootor
Of kolmefaasilise induktiivmootori tööpõhimõte
⇢ sünkroonse mootori tööpõhimõte
⇢ Elektrimootori võimsuse hinnang
⇢ Motor Duty Class ja selle liigitus
⇢ Induktsioonmootori pidurdamine Regeneratiivne ühendamine Dünaamiline pidurdamine induktiivmootoril
⇢ induktsioonmootorid | Induktiivmootori pidurdusjuhtimise käivitamine
⇢ DC mootorajamid
Of Elektriliste ajamite dünaamika
Step Stepperi mootori ühendamine
Of Elektriliste ajamite juhtimine
⇢ sünkroonmootorid
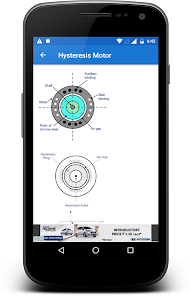
⇢ Hüstereesi mootor
⇢ Stepper Motor Drive
⇢ Bipolaarne samm-mootor
⇢ Mis on pidurdamine? Pidurdamise tüübid | Regeneratiivne ühendamine dünaamiline pidurdamine
A Pinge tüübid alalisvoolumootoris
⇢ Mis on Servo mootor?
⇢ Servomechanism | Servo-mootori teooria ja tööpõhimõte
⇢ Servo mootori juhtimine
⇢ DC Servo Motors | DC-servo mootori teooria
⇢ Servo-mootorite kontroller või servo-mootorijuht
⇢ Servo mootorirakendused robootika päikese jälgimise süsteemis jne
⇢ Variable Frequency Drive või VFD
⇢ Elektrimootorid
⇢ magnetvooluringid
⇢ õhupilu
⇢ pöördemomendi tootmine
⇢ konkreetsed koormused ja konkreetne väljund
⇢ Energia muundamine - Motional EMF
⇢ ekvivalentkaabel
Of Elektrimootorite üldomadused
⇢ Võimsad elektroonilised muundurid mootorsõidukite jaoks
⇢ Pinge kontroll - D.C. väljund alates D.C. Supply
⇢ induktiivkoormusega hakkija - ülepingekaitse
⇢ D.C alates A.C. - kontrollitud parandamine
⇢ 3-faasiline täielikult juhitav muundur
⇢ A. C. D. C. SP-SP Inversioon
⇢ Sinusoidne PWM
⇢ Inverteri lülitusseadmed
Of Toide lülitusseadmete jahutamine
⇢ Tavaline D.C. Motors
⇢ Pidev käitumine - praegused pinged
⇢ Shunt, seeria ja liitmootorid
⇢ Shunt mootor - stabiilsed tööomadused
⇢ neljakvartaliline käitus ja regeneratiivpidurdus
⇢ Täiskiirusega regeneratiivne pöördumine
⇢ Toy Motors
⇢ D.C. mootoriseadmed
⇢ Katkinev vool
⇢ Ühekordse konverteri pöördedringid
⇢ D.C. ajamite juhtimisseadised
⇢ Chopper-Fed D.C. Motor Drives
⇢ D.C. Servo Drives
⇢ Real Transformer
⇢ Inverter-Fedi induktsioonmootorid
►ajam töötab ja reguleerib liikuvate objektide kiirust, pöördemomenti ja suunda. Juhid kasutatakse tavaliselt kiiruse või liikumise juhtimise rakenduste jaoks, nagu näiteks tööpingid, transport, robotid, ventilaatorid jms. Elektrimootorite juhtimiseks kasutatavad ajamid on tuntud elektriajamitena.
►Vaadid võivad olla püsiva või muutuva tüübiga. Pideva kiirusega ajamid on muutuva kiirusega toimingute jaoks ebaefektiivsed; Sellistel juhtudel kasutatakse muutuva kiirusega ajamit koormate kasutamiseks mis tahes suurel kiirusel
►Ettevõimelised kiirusajamid on vajalikud erinevate koormuste kiiruse, positsiooni või pöördemomendi täpseks ja pidevaks juhtimiseks. Koos selle peamise funktsiooniga on mitmesuguseid seadmeid reguleeritavate kiirusajamite kasutamine. Mõned neist sisaldavad näiteks
➻ Kõrge efektiivsuse saavutamiseks: Elektrilised ajamid võimaldavad kasutada mitmesuguseid kiirusi millilivatitelt megavatidesse erineva võimsusega, seega on süsteemi üldine maksumus väiksem
Of Mootori töö peatamise või tagasikäigu täpsuse kiiruse suurendamiseks
The Käivitusvoolu juhtimine
➻ Et tagada kaitse
➻ Täiustatud juhtimise seadistamine koos parameetrite variatsiooniga, nagu temperatuur, rõhk, tase jne
【Käesolevas rakenduses käsitletavad teemad on loetletud allpool】
⇢ DC mootor või vahelduvvoolu mootor
Of kolmefaasilise induktiivmootori tööpõhimõte
⇢ sünkroonse mootori tööpõhimõte
⇢ Elektrimootori võimsuse hinnang
⇢ Motor Duty Class ja selle liigitus
⇢ Induktsioonmootori pidurdamine Regeneratiivne ühendamine Dünaamiline pidurdamine induktiivmootoril
⇢ induktsioonmootorid | Induktiivmootori pidurdusjuhtimise käivitamine
⇢ DC mootorajamid
Of Elektriliste ajamite dünaamika
Step Stepperi mootori ühendamine
Of Elektriliste ajamite juhtimine
⇢ sünkroonmootorid
⇢ Hüstereesi mootor
⇢ Stepper Motor Drive
⇢ Bipolaarne samm-mootor
⇢ Mis on pidurdamine? Pidurdamise tüübid | Regeneratiivne ühendamine dünaamiline pidurdamine
A Pinge tüübid alalisvoolumootoris
⇢ Mis on Servo mootor?
⇢ Servomechanism | Servo-mootori teooria ja tööpõhimõte
⇢ Servo mootori juhtimine
⇢ DC Servo Motors | DC-servo mootori teooria
⇢ Servo-mootorite kontroller või servo-mootorijuht
⇢ Servo mootorirakendused robootika päikese jälgimise süsteemis jne
⇢ Variable Frequency Drive või VFD
⇢ Elektrimootorid
⇢ magnetvooluringid
⇢ õhupilu
⇢ pöördemomendi tootmine
⇢ konkreetsed koormused ja konkreetne väljund
⇢ Energia muundamine - Motional EMF
⇢ ekvivalentkaabel
Of Elektrimootorite üldomadused
⇢ Võimsad elektroonilised muundurid mootorsõidukite jaoks
⇢ Pinge kontroll - D.C. väljund alates D.C. Supply
⇢ induktiivkoormusega hakkija - ülepingekaitse
⇢ D.C alates A.C. - kontrollitud parandamine
⇢ 3-faasiline täielikult juhitav muundur
⇢ A. C. D. C. SP-SP Inversioon
⇢ Sinusoidne PWM
⇢ Inverteri lülitusseadmed
Of Toide lülitusseadmete jahutamine
⇢ Tavaline D.C. Motors
⇢ Pidev käitumine - praegused pinged
⇢ Shunt, seeria ja liitmootorid
⇢ Shunt mootor - stabiilsed tööomadused
⇢ neljakvartaliline käitus ja regeneratiivpidurdus
⇢ Täiskiirusega regeneratiivne pöördumine
⇢ Toy Motors
⇢ D.C. mootoriseadmed
⇢ Katkinev vool
⇢ Ühekordse konverteri pöördedringid
⇢ D.C. ajamite juhtimisseadised
⇢ Chopper-Fed D.C. Motor Drives
⇢ D.C. Servo Drives
⇢ Real Transformer
⇢ Inverter-Fedi induktsioonmootorid
Värskendatud:
Ohutus algab selle mõistmisest, kuidas arendajad teie andmeid koguvad ja jagavad. Andmete privaatsuse ja turvalisuse tavad võivad olenevalt kasutusviisist ning teie piirkonnast ja vanusest erineda. Selle teabe esitas arendaja ja seda võidakse aja jooksul värskendada.

See rakendus võib järgnevaid andmetüüpe jagada kolmandate osapooltega
Seadme või muud ID-d

Andmeid ei koguta
Lisateave selle kohta, kuidas arendajad andmete kogumisest teada annavad

Andmed on edastamisel krüpteeritud

Andmeid ei saa kustutada
Mis on uut?
- More Topics Added
Rakenduse tugi
Teave arendaja kohta
Prabhu Thankaraju
vishwasparrow@gmail.com
101-B,Nishadham Bldg,1/5
Chipale,Panvel
NAVI MUMBAI, Maharashtra 410206
India
undefined





