
Electrical Drives
Iragarkiak ditu
10.000+
deskarga

Adin guztietarako
info




Aplikazio honi buruz
► Unitate elektrikoak industriaren eta automatizazio prozesuaren zati dira, bereziki motorraren abiadura kontrol zehatza lehentasunezko baldintza denean. Horrez gain, tren elektriko edo lokomotor elektriko moderno guztiak unitate elektrikoek elikatu dituzte. Robotika beste arlo garrantzitsu bat da, abiadura erreguladoreek abiadura zehatza eta kokapenaren kontrola eskaintzen dute
► Unitateak objektu mugikorren abiadura, momentua eta norabidea funtzionatzen eta kontrolatzen du. Unitateak abiadura edo mugimendu kontrolerako aplikazioetarako erabiltzen dira, hala nola makina erremintak, garraioa, robotak, zaleak, eta abar. Motor elektrikoen kontrola egiteko unitateak unitate elektrikoak dira.
► Unitateak mota konstante edo aldakorrak izan daitezke. Abiadura abiadura konstanteak abiadura aldakorreko eragiketak ez dira eraginkorrak; Horrelakoetan, abiadura-unitate aldakorrak kargak funtzionatzeko erabiltzen dira abiadura-tarte zabal batean
► Abiadura-unitate erregulagarriak beharrezkoak dira karga ezberdinen abiadura, posizioa edo momentua kontrolatzeko. Funtzio nagusi honekin batera, abiadura erreguladore unitateak erabiltzeko arrazoi ugari daude. Horietako batzuk besteak beste, besteak beste
➻ Eraginkortasun handia lortzeko: unitate elektrikoek potentzia zabal bat erabil dezakete, abiadura desberdinetatik abiatuta milwarwatt eta megawattsietara eta, beraz, sistema eragilearen kostu orokorra murriztu egiten da.
➻ Motorraren eragiketak gelditu edo atzera egiteko zehaztasunaren abiadura handitzeko
➻ Hasierako abiapuntua kontrolatzeko
➻ Babesa emateko
➻ Kontrol aurreratua kontrolatzeko tenperatura, presioa, maila, etab. Bezalako parametroen aldakuntza.
【Aplikazio honetan estaltzen diren gaiak Zerrendan daude azpian】
⇢ DC Motor edo Zuzena Current Motor
➡ Hiru faseko indukzio motorraren laneko printzipioa
Motor sinkronoaren lanaren printzipioa
Motor elektrikoaren potentzia balorazioa
⎯ Motor-motako betebeharra eta sailkapena
⇢ Indukzio Motor Balaztatze Birsorkuntza Indukzio Motorren Balaztatze Dinamikoa Plugging
⇢ Indukziozko motorren unitateak | Indukzio motorra balaztatze abiadura kontrolatzen hasteko
⇢ DC Motor Drives
⇢ Dinamika elektrikoen unitateak
⇢ Stepper motorren arteko tartea
⎯ Unitate elektrikoen kontrola
⇢ Motorren unitate sinkronoak
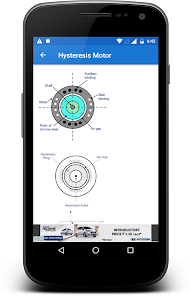
⇢ Hysteresis Motor
⇢ Stepper Motor Drive
⇢ Bipolar Stepper Motor
⇢ Zer da Brakinga? Balaztatze motak | Balazta dinamikoa berreskuratzea
✒ Balaztatze-mota DC motor batean
⇢ Zer da Servo Motor?
⇢ Zerbitzomekanismoa | Servo Motorren teoria eta lanaren printzipioa
○ Servo Motor Control
⇢ DC Servo Motors | DC Servo Motorren teoria
⇢ Servo Motor Controller edo Servo Motor Driver
⇢ Robotika Eguzki Tracking Sistema etb. Servo Motor aplikazioak
⎯ Aldakortasun maiztasuneko unitatea edo VFD
⇢ Motore elektrikoak
➡ Zirkuitu magnetikoak
⇢ Airearen hutsuneak
禄 Torque produkzioa
❚ Karga espezifikoak eta irteera zehatzak
➡ Energiaren bihurketa - Motional Emf
Zirkuitu baliokidea
Motore elektrikoen propietate orokorrak
Potentzia elektronikoko bihurgailuak motorreko unitateetarako
⇢ Tentsioaren kontrola - D.C. Output D.C. Hornikuntza
⇢ Chopper karga induktiboa: gehiegizko babesa
⇢ D.C. A.C.tik - Zuzenketa kontrolatua
➡ Fase hirukoitz guztiz kontrolatutako bihurgailua
⇢ A.C. D.C. SP - SP Inbertsioa
⇢ PWM sinusoidala
⇢ Inbertitzailearen aldatze gailuak
⇢ Potentzia aldatzeko gailuen hozteak
⇢ Ohiko D.C. Motoreak
⇢ Transient Behavior - Uneko kirurgia
⇢ Shunt, Series eta Compound Motors
⇢ Shunt motor - steady-state eragilearen ezaugarriak
⇢ Lau norabideko eragiketa eta birsorkuntza birsortzailea
⇢ Abiadura osoa birsorkuntza birsortzailea
⇢ Toy Motors
⇢ D.C. Motor Unitateak
➡ Korronte ez-arrunta
⇢ Bihurgailu bakarreko unitateak alderantziz
⎯ Kontrol-antolamenduak D.C. Unitateetarako
⇢ Chopper-Fed D.C. Motor Unitateak
⇢ D.C. Servo unitateak
➡ Real Transformadoreak
⇢ Inbertsore-Fed Indukziozko Motorrak
► Unitateak objektu mugikorren abiadura, momentua eta norabidea funtzionatzen eta kontrolatzen du. Unitateak abiadura edo mugimendu kontrolerako aplikazioetarako erabiltzen dira, hala nola makina erremintak, garraioa, robotak, zaleak, eta abar. Motor elektrikoen kontrola egiteko unitateak unitate elektrikoak dira.
► Unitateak mota konstante edo aldakorrak izan daitezke. Abiadura abiadura konstanteak abiadura aldakorreko eragiketak ez dira eraginkorrak; Horrelakoetan, abiadura-unitate aldakorrak kargak funtzionatzeko erabiltzen dira abiadura-tarte zabal batean
► Abiadura-unitate erregulagarriak beharrezkoak dira karga ezberdinen abiadura, posizioa edo momentua kontrolatzeko. Funtzio nagusi honekin batera, abiadura erreguladore unitateak erabiltzeko arrazoi ugari daude. Horietako batzuk besteak beste, besteak beste
➻ Eraginkortasun handia lortzeko: unitate elektrikoek potentzia zabal bat erabil dezakete, abiadura desberdinetatik abiatuta milwarwatt eta megawattsietara eta, beraz, sistema eragilearen kostu orokorra murriztu egiten da.
➻ Motorraren eragiketak gelditu edo atzera egiteko zehaztasunaren abiadura handitzeko
➻ Hasierako abiapuntua kontrolatzeko
➻ Babesa emateko
➻ Kontrol aurreratua kontrolatzeko tenperatura, presioa, maila, etab. Bezalako parametroen aldakuntza.
【Aplikazio honetan estaltzen diren gaiak Zerrendan daude azpian】
⇢ DC Motor edo Zuzena Current Motor
➡ Hiru faseko indukzio motorraren laneko printzipioa
Motor sinkronoaren lanaren printzipioa
Motor elektrikoaren potentzia balorazioa
⎯ Motor-motako betebeharra eta sailkapena
⇢ Indukzio Motor Balaztatze Birsorkuntza Indukzio Motorren Balaztatze Dinamikoa Plugging
⇢ Indukziozko motorren unitateak | Indukzio motorra balaztatze abiadura kontrolatzen hasteko
⇢ DC Motor Drives
⇢ Dinamika elektrikoen unitateak
⇢ Stepper motorren arteko tartea
⎯ Unitate elektrikoen kontrola
⇢ Motorren unitate sinkronoak
⇢ Hysteresis Motor
⇢ Stepper Motor Drive
⇢ Bipolar Stepper Motor
⇢ Zer da Brakinga? Balaztatze motak | Balazta dinamikoa berreskuratzea
✒ Balaztatze-mota DC motor batean
⇢ Zer da Servo Motor?
⇢ Zerbitzomekanismoa | Servo Motorren teoria eta lanaren printzipioa
○ Servo Motor Control
⇢ DC Servo Motors | DC Servo Motorren teoria
⇢ Servo Motor Controller edo Servo Motor Driver
⇢ Robotika Eguzki Tracking Sistema etb. Servo Motor aplikazioak
⎯ Aldakortasun maiztasuneko unitatea edo VFD
⇢ Motore elektrikoak
➡ Zirkuitu magnetikoak
⇢ Airearen hutsuneak
禄 Torque produkzioa
❚ Karga espezifikoak eta irteera zehatzak
➡ Energiaren bihurketa - Motional Emf
Zirkuitu baliokidea
Motore elektrikoen propietate orokorrak
Potentzia elektronikoko bihurgailuak motorreko unitateetarako
⇢ Tentsioaren kontrola - D.C. Output D.C. Hornikuntza
⇢ Chopper karga induktiboa: gehiegizko babesa
⇢ D.C. A.C.tik - Zuzenketa kontrolatua
➡ Fase hirukoitz guztiz kontrolatutako bihurgailua
⇢ A.C. D.C. SP - SP Inbertsioa
⇢ PWM sinusoidala
⇢ Inbertitzailearen aldatze gailuak
⇢ Potentzia aldatzeko gailuen hozteak
⇢ Ohiko D.C. Motoreak
⇢ Transient Behavior - Uneko kirurgia
⇢ Shunt, Series eta Compound Motors
⇢ Shunt motor - steady-state eragilearen ezaugarriak
⇢ Lau norabideko eragiketa eta birsorkuntza birsortzailea
⇢ Abiadura osoa birsorkuntza birsortzailea
⇢ Toy Motors
⇢ D.C. Motor Unitateak
➡ Korronte ez-arrunta
⇢ Bihurgailu bakarreko unitateak alderantziz
⎯ Kontrol-antolamenduak D.C. Unitateetarako
⇢ Chopper-Fed D.C. Motor Unitateak
⇢ D.C. Servo unitateak
➡ Real Transformadoreak
⇢ Inbertsore-Fed Indukziozko Motorrak
Azken eguneratzea
Seguru egoteko, funtsezkoa da jakitea garatzaileek nola biltzen eta partekatzen dituzten zuri buruzko datuak. Baliteke datuen pribatutasunaren eta segurtasunaren inguruko jardunbideak aplikazioaren erabileraren, lurraldearen eta adinaren araberakoak izatea. Informazio hori garatzaileak eman du, eta baliteke aurrerago eguneratzea.

Baliteke aplikazioak datu mota hauek partekatzea hirugarrenekin:
Gailuaren identifikatzaileak edo bestelakoak

Ez da daturik biltzen
Lortu informazio gehiago garatzaileek bildutako datuak aitortzeko duten moduari buruz

Datuak bidaltze-prozesuan enkriptatzen dira

Datuak ezin dira ezabatu
Berritasunak
- More Topics Added
Aplikazioaren laguntza-zerbitzua
Garatzaileari buruz
Prabhu Thankaraju
vishwasparrow@gmail.com
101-B,Nishadham Bldg,1/5
Chipale,Panvel
NAVI MUMBAI, Maharashtra 410206
India
undefined





