
Electrical Drives
Կա գովազդ
10 հզր+
Ներբեռնումներ

Բոլորի համար
info




Հավելվածի մասին
Էլեկտրական սկավառակները հանդիսանում են արդյունաբերական եւ ավտոմատացման գործընթացների անբաժանելի մասը, հատկապես այն դեպքում, երբ շարժիչի արագության ճշգրիտ հսկողություն հիմնական պահանջն է: Բացի այդ, բոլոր ժամանակակից էլեկտրական գնացքները կամ լոկոմոտիվային համակարգերը սնուցվում են էլեկտրական շարժիչների կողմից: Robotics- ը եւս մեկ խոշոր տարածք է, որտեղ կարգավորվող արագության շարժիչները առաջարկում են ճշգրիտ արագություն եւ դիրքի վերահսկում
Շարժիչը գործում եւ վերահսկում է շարժվող առարկաների արագությունը, շրջանակը եւ ուղղությունը: Շարժիչները սովորաբար կիրառվում են արագության կամ շարժման հսկողության դիմաց, ինչպիսիք են հաստոցները, տրանսպորտը, ռոբոտները, երկրպագուները եւ այլն: Էլեկտրաշարժիչների վերահսկման համար օգտագործվող կրիչներ հայտնի են որպես էլեկտրական շարժիչներ:
► Սկավառակներ կարող են լինել անընդհատ կամ փոփոխական տիպի: Անխափան արագության խցիկները անարդյունավետ են փոփոխական արագագործական գործողությունների համար. նման դեպքերում փոփոխական արագության կրիչներ օգտագործվում են բեռների գործածման համար `արագության լայն շրջանակի ցանկացած մասում
► Կարգավորելի արագության կրիչներ անհրաժեշտ են ճշգրիտ եւ շարունակական հսկողության արագության, դիրքի կամ տարբեր բեռների կորստի համար: Այս հիմնական գործառույթի հետ մեկտեղ կան բազմաթիվ պատճառներ, որոնք կօգտագործվեն կարգավորվող արագության կրիչներ: Նրանցից ոմանք ներառում են դասեր
➻ Բարձր արդյունավետության հասնելու համար. Էլեկտրական սկավառակները հնարավորություն են տալիս լայն սպեկտրից օգտվել բազմապտուղներից մինչեւ մեգավաթներ տարբեր արագությունների համար եւ, հետեւաբար, համակարգի գործարկման ընդհանուր արժեքը նվազեցվում է
➻ Շարժիչի դադարեցման կամ վերադարձման գործողության ճշգրտության արագությունը բարձրացնելու համար
➻ Վերահսկողության սկիզբը
➻ պաշտպանություն ապահովելու համար
Advanced Կարգավորող վերահսկողություն սահմանել ջերմաստիճանի, ճնշման, մակարդակի եւ այլն պարամետրերի տատանումներով:
【Այս հավելվածում ընդգրկված թեմաները ցուցակված են】
⇢ DC Motor կամ Direct Current Motor
Three Երեք փուլային ներարկման շարժիչի աշխատանքային սկզբունք
⇢ Սինխրոն շարժիչ աշխատանքային սկզբունք
⇢ Էլեկտրական շարժիչի հզորությունը
⇢ Շարժիչային պարտականությունների դասը եւ դասակարգումը
⇢ Ներածություն շարժիչի արգելակումը վերականգնողական պտտվող շարժիչի դինամիկ արգելակումը
⇢ Ներածություն շարժիչի շարժիչներ | Սկսած արգելակման արագության հսկողություն զորակոչի շարժիչի
⇢ DC շարժիչի շարժիչներ
⇢ Էլեկտրական շարժիչների դինամիկան
⇢ Քայլերի շարժիչի փոխկապակցում
⇢ Էլեկտրական շարժիչների վերահսկում
⇢ Սինխրոն շարժիչի շարժիչներ
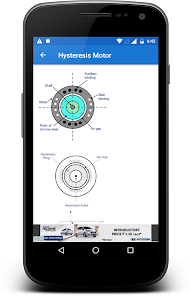
⇢ Hysteresis Motor
⇢ Stepper Motor Drive- ը
⇢ Երկկողմանի Stepper Motor
⇢ Ինչ է արգելակումը: Արգելակման տեսակները | Վերականգնվող պտտվող դինամիկ արգելակումը
⇢ DC շարժիչի արգելակման տեսակները
⇢ Ինչ է Servo Motor- ը:
⇢ Servomekanizm | Servo շարժիչի տեսություն եւ աշխատանքային սկզբունք
⇢ Servo Motor Control
⇢ DC Servo Motors | DC Servo Motor- ի տեսություն
⇢ Servo Motor Controller կամ Servo Motor Driver- ը
⇢ Servo Motor- ի կիրառումը ռոբոտաշինության արեւային հսկողության համակարգը եւ այլն
⇢ Variable Frequency Drive կամ VFD
⇢ Էլեկտրաշարժիչներ
⇢ Մագնիսական սխեմաներ
⇢ Օդի բացը
⇢ Թորիկի արտադրություն
⇢ Հատուկ բեռներ եւ հատուկ արդյունք
⇢ Էներգիայի փոխակերպում - Motional Emf
⇢ Equivalent Circuit
⇢ Էլեկտրական շարժիչների ընդհանուր առանձնահատկությունները
⇢ Էլեկտրաէներգիայի Էլեկտրոնային Փոխարկիչներ Շարժիչների համար
⇢ Լարման վերահսկում - D.C. Արդյունք D.C. մատակարարումից
⇢ Անջատիչ բեռնվածությամբ կափույրը `գերհզորության պաշտպանությունը
⇢ D.C. From A.C. - Վերահսկվող ռեկտիֆիկացիա
⇢ 3 փուլով լիովին վերահսկվող փոխարկիչ
⇢ Ա.Կ. Դ.Ս.-ի SP-SP- ի Inversion- ից
⇢ Sinusoidal PWM
⇢ Inverter անջատիչ սարքեր
⇢ Սնուցման էներգիայի անջատիչ սարքեր
⇢ սովորական D.C. Motors
⇢ Ժամանակավոր վարքագիծ
⇢ Shunt, Series եւ համակցված շարժիչներ
⇢ Shunt շարժիչ - կայուն պետական գործառնական հատկանիշներ
⇢ Չորս քառամյա գործառույթ եւ ռեգեներատիվ արգելակում
⇢ Ամբողջական արագ արձագանքման վերականգնում
⇢ Toy Motors
⇢ D.C. Շարժիչի շարժիչներ
⇢ Անընդհատ ընթացիկ
⇢ Single-converter reversing կրիչներ
⇢ Վերահսկիչ միջոցառումներ D.C. շարժիչների համար
⇢ Chopper-Fed D.C. Շարժիչի շարժիչներ
⇢ D.C. Servo սկավառակներ
⇢ Իրական տրանսֆորմատոր
⇢ Inverter-Fed- ի զորակոչի շարժիչի շարժիչներ
Շարժիչը գործում եւ վերահսկում է շարժվող առարկաների արագությունը, շրջանակը եւ ուղղությունը: Շարժիչները սովորաբար կիրառվում են արագության կամ շարժման հսկողության դիմաց, ինչպիսիք են հաստոցները, տրանսպորտը, ռոբոտները, երկրպագուները եւ այլն: Էլեկտրաշարժիչների վերահսկման համար օգտագործվող կրիչներ հայտնի են որպես էլեկտրական շարժիչներ:
► Սկավառակներ կարող են լինել անընդհատ կամ փոփոխական տիպի: Անխափան արագության խցիկները անարդյունավետ են փոփոխական արագագործական գործողությունների համար. նման դեպքերում փոփոխական արագության կրիչներ օգտագործվում են բեռների գործածման համար `արագության լայն շրջանակի ցանկացած մասում
► Կարգավորելի արագության կրիչներ անհրաժեշտ են ճշգրիտ եւ շարունակական հսկողության արագության, դիրքի կամ տարբեր բեռների կորստի համար: Այս հիմնական գործառույթի հետ մեկտեղ կան բազմաթիվ պատճառներ, որոնք կօգտագործվեն կարգավորվող արագության կրիչներ: Նրանցից ոմանք ներառում են դասեր
➻ Բարձր արդյունավետության հասնելու համար. Էլեկտրական սկավառակները հնարավորություն են տալիս լայն սպեկտրից օգտվել բազմապտուղներից մինչեւ մեգավաթներ տարբեր արագությունների համար եւ, հետեւաբար, համակարգի գործարկման ընդհանուր արժեքը նվազեցվում է
➻ Շարժիչի դադարեցման կամ վերադարձման գործողության ճշգրտության արագությունը բարձրացնելու համար
➻ Վերահսկողության սկիզբը
➻ պաշտպանություն ապահովելու համար
Advanced Կարգավորող վերահսկողություն սահմանել ջերմաստիճանի, ճնշման, մակարդակի եւ այլն պարամետրերի տատանումներով:
【Այս հավելվածում ընդգրկված թեմաները ցուցակված են】
⇢ DC Motor կամ Direct Current Motor
Three Երեք փուլային ներարկման շարժիչի աշխատանքային սկզբունք
⇢ Սինխրոն շարժիչ աշխատանքային սկզբունք
⇢ Էլեկտրական շարժիչի հզորությունը
⇢ Շարժիչային պարտականությունների դասը եւ դասակարգումը
⇢ Ներածություն շարժիչի արգելակումը վերականգնողական պտտվող շարժիչի դինամիկ արգելակումը
⇢ Ներածություն շարժիչի շարժիչներ | Սկսած արգելակման արագության հսկողություն զորակոչի շարժիչի
⇢ DC շարժիչի շարժիչներ
⇢ Էլեկտրական շարժիչների դինամիկան
⇢ Քայլերի շարժիչի փոխկապակցում
⇢ Էլեկտրական շարժիչների վերահսկում
⇢ Սինխրոն շարժիչի շարժիչներ
⇢ Hysteresis Motor
⇢ Stepper Motor Drive- ը
⇢ Երկկողմանի Stepper Motor
⇢ Ինչ է արգելակումը: Արգելակման տեսակները | Վերականգնվող պտտվող դինամիկ արգելակումը
⇢ DC շարժիչի արգելակման տեսակները
⇢ Ինչ է Servo Motor- ը:
⇢ Servomekanizm | Servo շարժիչի տեսություն եւ աշխատանքային սկզբունք
⇢ Servo Motor Control
⇢ DC Servo Motors | DC Servo Motor- ի տեսություն
⇢ Servo Motor Controller կամ Servo Motor Driver- ը
⇢ Servo Motor- ի կիրառումը ռոբոտաշինության արեւային հսկողության համակարգը եւ այլն
⇢ Variable Frequency Drive կամ VFD
⇢ Էլեկտրաշարժիչներ
⇢ Մագնիսական սխեմաներ
⇢ Օդի բացը
⇢ Թորիկի արտադրություն
⇢ Հատուկ բեռներ եւ հատուկ արդյունք
⇢ Էներգիայի փոխակերպում - Motional Emf
⇢ Equivalent Circuit
⇢ Էլեկտրական շարժիչների ընդհանուր առանձնահատկությունները
⇢ Էլեկտրաէներգիայի Էլեկտրոնային Փոխարկիչներ Շարժիչների համար
⇢ Լարման վերահսկում - D.C. Արդյունք D.C. մատակարարումից
⇢ Անջատիչ բեռնվածությամբ կափույրը `գերհզորության պաշտպանությունը
⇢ D.C. From A.C. - Վերահսկվող ռեկտիֆիկացիա
⇢ 3 փուլով լիովին վերահսկվող փոխարկիչ
⇢ Ա.Կ. Դ.Ս.-ի SP-SP- ի Inversion- ից
⇢ Sinusoidal PWM
⇢ Inverter անջատիչ սարքեր
⇢ Սնուցման էներգիայի անջատիչ սարքեր
⇢ սովորական D.C. Motors
⇢ Ժամանակավոր վարքագիծ
⇢ Shunt, Series եւ համակցված շարժիչներ
⇢ Shunt շարժիչ - կայուն պետական գործառնական հատկանիշներ
⇢ Չորս քառամյա գործառույթ եւ ռեգեներատիվ արգելակում
⇢ Ամբողջական արագ արձագանքման վերականգնում
⇢ Toy Motors
⇢ D.C. Շարժիչի շարժիչներ
⇢ Անընդհատ ընթացիկ
⇢ Single-converter reversing կրիչներ
⇢ Վերահսկիչ միջոցառումներ D.C. շարժիչների համար
⇢ Chopper-Fed D.C. Շարժիչի շարժիչներ
⇢ D.C. Servo սկավառակներ
⇢ Իրական տրանսֆորմատոր
⇢ Inverter-Fed- ի զորակոչի շարժիչի շարժիչներ
Վերջին թարմացումը՝
Անվտանգությունը որոշվում է նրանով, թե ինչպես են մշակողները հավաքում և փոխանցում ձեր տվյալները։ Տվյալների գաղտնիության և անվտանգության ապահովումը կախված է հավելվածի օգտագործումից, օգտատիրոջ տարիքից և բնակության երկրից։ Այս տեղեկությունները տրամադրվել են մշակողի կողմից և ժամանակի ընթացքում կարող են թարմացվել։

Այս հավելվածը կարող է նշված տեսակի տվյալները փոխանցել երրորդ կողմերին
Սարքի կամ այլ նույնացուցիչներ

Հավելվածը տվյալներ չի հավաքում
Իմացեք ավելին, թե ինչպես են մշակողները հայտարարում տվյալների հավաքման մասին

Տվյալները փոխանցվելիս գաղտնագրվում են

Տվյալները հնարավոր չէ ջնջել
Ինչ նոր բան կա
- More Topics Added
Հավելվածի աջակցություն
Մշակողի մասին
Prabhu Thankaraju
vishwasparrow@gmail.com
101-B,Nishadham Bldg,1/5
Chipale,Panvel
NAVI MUMBAI, Maharashtra 410206
India
undefined





