
Electrical Drives
ປະກອບມີໂຄສະນາ
10 ພັນ+
ດາວໂຫຼດ

ທຸກຄົນ
info




ກ່ຽວກັບແອັບນີ້
►ຂັບເຄື່ອນເອເລັກໂຕຣນິກແມ່ນສ່ວນຫນຶ່ງຂອງຂະບວນການອຸດສາຫະກໍາແລະອັດຕະໂນມັດ, ໂດຍສະເພາະແມ່ນການຄວບຄຸມຄວາມໄວຂອງມໍເຕີແມ່ນຄວາມຕ້ອງການທີ່ສໍາຄັນ. ນອກຈາກນັ້ນ, ທັງຫມົດໄຟຟ້າໄຟຟ້າທີ່ທັນສະໄຫມຫຼືລະບົບເຄື່ອງຈັກໄດ້ຖືກຂັບເຄື່ອນດ້ວຍໄຟຟ້າ. ຫຸ່ນຍົນເປັນເຂດທີ່ສໍາຄັນອີກບ່ອນທີ່ຂັບລົດຄວາມໄວສາມາດປັບຄວາມໄວໄດ້ແລະຄວບຄຸມຕໍາແຫນ່ງ
►ຂັບເຄື່ອນແລະຄວບຄຸມຄວາມໄວ, ແຮງບິດແລະທິດທາງຂອງວັດຖຸເຄື່ອນຍ້າຍ. ເຄື່ອງຈັກແມ່ນໃຊ້ສໍາລັບການໃຊ້ງານຄວບຄຸມຄວາມໄວຫຼື motion ເຊັ່ນ: ເຄື່ອງຈັກ, ການຂົນສົ່ງ, ຫຸ່ນຍົນ, fans, ອື່ນໆ. ຮວບຮວມຕ່າງໆທີ່ໃຊ້ໃນການຄວບຄຸມເຄື່ອງຈັກໄຟຟ້າແມ່ນເປັນໄຟຟ້າ.
drives ສາມາດເປັນປະເພດຄົງທີ່ຫຼືປ່ຽນແປງ. ການຂັບລົດຄວາມໄວຄົງທີ່ແມ່ນບໍ່ມີປະສິດທິພາບສໍາລັບການດໍາເນີນງານຄວາມໄວທີ່ປ່ຽນແປງ; ໃນກໍລະນີດັ່ງກ່າວກໍຕາມ, ຄວາມໄວອັດຕະໂນມັດຈະຖືກນໍາໃຊ້ເພື່ອປະຕິບັດວຽກໃນທຸກໆລະດັບຄວາມໄວ
ຂັບລົດຄວາມໄວທີ່ປັບໄດ້ແມ່ນຈໍາເປັນສໍາລັບການຄວບຄຸມຄວາມໄວ, ຕໍາແຫນ່ງ, ຫຼືແຮງມ້າຂອງການໂຫຼດທີ່ແຕກຕ່າງກັນຢ່າງຊັດເຈນແລະຕໍ່ເນື່ອງ. ຄຽງຄູ່ກັບການເຮັດວຽກທີ່ສໍາຄັນນີ້, ມີເຫດຜົນຫຼາຍຢ່າງທີ່ຈະນໍາໃຊ້ໄດຄວາມໄວທີ່ສາມາດປັບໄດ້. ບາງຢ່າງຂອງເຫຼົ່ານີ້ include64
➻ເພື່ອໃຫ້ປະສິດທິພາບສູງ: ໄຟຟ້າໄຟຟ້າສາມາດນໍາໃຊ້ລະດັບຄວາມກວ້າງຂອງພະລັງງານ, ຈາກ milliwatts ກັບ megawatts ສໍາລັບຄວາມໄວຕ່າງໆແລະດັ່ງນັ້ນຄ່າໃຊ້ຈ່າຍທັງຫມົດຂອງການດໍາເນີນງານລະບົບແມ່ນຫຼຸດລົງ
ເພື່ອເພີ່ມຄວາມໄວຂອງຄວາມຖືກຕ້ອງຂອງການຢຸດຫລືການປະຕິເສດວຽກງານຂອງມໍເຕີ
➻ເພື່ອຄວບຄຸມການເລີ່ມຕົ້ນຂອງການເລີ່ມຕົ້ນ
ເພື່ອໃຫ້ການປົກປ້ອງ
➻ສ້າງຕັ້ງການຄວບຄຸມແບບພິເສດດ້ວຍການປ່ຽນແປງຂອງຕົວກໍານົດການເຊັ່ນ: ອຸນຫະພູມ, ຄວາມກົດດັນ, ລະດັບ, ແລະອື່ນໆ.
ຫົວຂໍ້ທີ່ກວມເອົາໃນແອັບພລິເຄຊັນນີ້ແມ່ນໄດ້ລະບຸໄວ້ຂ້າງລຸ່ມນີ້】
⇢ມໍເຕີ DC ຫຼື Motor ກົງໂດຍກົງ
⇢ຫຼັກການເຮັດວຽກຂອງມໍເຕີສະທ້ອນສາມເຟດ
◇ຫຼັກການເຮັດວຽກຂອງຈັກກະວານ Synchronous
⇢ເຄື່ອງໄຟຟ້າພະລັງງານໄຟຟ້າ Rating
⇢ລະບົບ Motor Duty Class ແລະ Classification ຂອງມັນ
▶ການບີບອັດເຄື່ອງຈັກອັດຕະໂນມັດ Braking ກໍາປັ່ນ Regenerative ການບີບອັດແບບເຄື່ອນໄຫວຂອງ Motor Induction
⇢ອັດຕະໂນມັດຂັບລົດ | ເລີ່ມຕົ້ນການຄວບຄຸມຄວາມໄວຂອງການຄວບຄຸມຄວາມໄວຂອງເຄື່ອງຈັກໃນການຂັບຂີ່
⇢ DC Motor Drives
⇢ແບບເຄື່ອນໄຫວຂອງໄຟຟ້າ
erg Interface of Stepper Motor
◯ການຄວບຄຸມການຂັບລົດໄຟຟ້າ
⇢ Synchronous Motor Drives
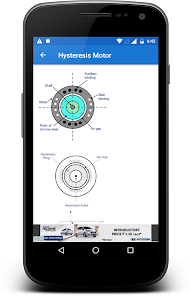
⇢ Hysteresis Motor
車 Stepper Motor Drive
⇢ Bipolar Stepper Motor
⇢ແມ່ນຫຍັງຄືເບກ? Types of Braking | ການບີບອັດແບບບີບບັງຄັບແບບກໍາປັ່ນ Regenerative
ປະເພດຂອງການເບກໃນມໍເຕີ DC
⇢ເຄື່ອງຈັກ Servo ແມ່ນຫຍັງ?
⇢ Servomechanism | ຫຼັກການທິດສະດີແລະການເຮັດວຽກຂອງ Servo Motor
⇢ Servo Motor Control
⇢ DC Servo Motors | ທິດສະດີຂອງ DC Servo Motor
⇢ Servo Motor Controller ຫະລື Servo Motor Driver
⇢ Servo Motor Applications in Robotics Solar Tracking System ຯ ລະຯ
⇢ Variable Frequency Drive ຫຼື VFD
車 Electric Motors
⇢ວົງຈອນສະນະແມ່ເຫຼັກ
⇢ຊ່ອງທາງອາກາດ
⇢ການຜະລິດ Torque
⇢ Loadings ເສພາະແລະຜົນຜະລິດເສພາະ
⇢ການປ່ຽນແປງພະລັງງານ - Motional Emf
⇢ທຽບເທົ່າວົງຈອນ
⇢ສົມບັດທົ່ວໄປຂອງມໍເຕີໄຟຟ້າ
⇢ Power Electronic Converters ສໍາລັບຂັບລົດ
⇢ການຄວບຄຸມແຮງດັນ - D. Output From D.C Supply
⇢ Chopper ທີ່ມີການຄວບຄຸມການໃຊ້ແຮງດັນເກີນແຮງດັນ
⇢ D.C. ຈາກ A.C. - ການກັ່ນຕອງຄວບຄຸມ
⇢ຕົວປ່ຽນແປງ 3 ປັດຈຸບັນຄວບຄຸມຢ່າງເຕັມສ່ວນ
⇢ A ຈາກ DC SP-SP Inversion
↓ Sinusoidal PWM
⇢ອຸປະກອນຫຼັບຫຼັບໃນການປ່ຽນແປງ
포⇢⇢⇢⇢⇢⇢⇢⇢⇢⇢⇢
⇢ Conventional D.C Motors
⇢ Behavior Transient - Surges ໃນປະຈຸບັນ
⇢ Shunt, Series ແລະ Compound Motors
⇢ເຄື່ອງຈັກ Shunt - ສະຖານະພາບການດໍາເນີນງານສະຫມໍ່າສະເຫມີ
⇢ການປະຕິບັດສີ່ Quadrant ແລະການບັງຄັບໃຊ້ Regenerative
◇ການປ່ຽນແປງທີ່ມີຄວາມໄວເຕັມທີ່
⇢ Toy Motors
⇢ D. ເຄື່ອງຈັກຂັບ
⇢ປັດຈຸບັນບໍ່ສາມາດປະຕິບັດໄດ້
⇢ຕົວແປງສະມາດດ່ຽວປ່ຽນແປງໄດ
⇢ການຄວບຄຸມການຄວບຄຸມສໍາລັບໄດ CDs
⇢ Chopper-Fed D.C. Motor Drives
D. Servo Drives
⇢ The Transformer ຈິງ
⇢ເຄື່ອງໂມດູນອັດຕະໂນມັດ Inverter-Fed
►ຂັບເຄື່ອນແລະຄວບຄຸມຄວາມໄວ, ແຮງບິດແລະທິດທາງຂອງວັດຖຸເຄື່ອນຍ້າຍ. ເຄື່ອງຈັກແມ່ນໃຊ້ສໍາລັບການໃຊ້ງານຄວບຄຸມຄວາມໄວຫຼື motion ເຊັ່ນ: ເຄື່ອງຈັກ, ການຂົນສົ່ງ, ຫຸ່ນຍົນ, fans, ອື່ນໆ. ຮວບຮວມຕ່າງໆທີ່ໃຊ້ໃນການຄວບຄຸມເຄື່ອງຈັກໄຟຟ້າແມ່ນເປັນໄຟຟ້າ.
drives ສາມາດເປັນປະເພດຄົງທີ່ຫຼືປ່ຽນແປງ. ການຂັບລົດຄວາມໄວຄົງທີ່ແມ່ນບໍ່ມີປະສິດທິພາບສໍາລັບການດໍາເນີນງານຄວາມໄວທີ່ປ່ຽນແປງ; ໃນກໍລະນີດັ່ງກ່າວກໍຕາມ, ຄວາມໄວອັດຕະໂນມັດຈະຖືກນໍາໃຊ້ເພື່ອປະຕິບັດວຽກໃນທຸກໆລະດັບຄວາມໄວ
ຂັບລົດຄວາມໄວທີ່ປັບໄດ້ແມ່ນຈໍາເປັນສໍາລັບການຄວບຄຸມຄວາມໄວ, ຕໍາແຫນ່ງ, ຫຼືແຮງມ້າຂອງການໂຫຼດທີ່ແຕກຕ່າງກັນຢ່າງຊັດເຈນແລະຕໍ່ເນື່ອງ. ຄຽງຄູ່ກັບການເຮັດວຽກທີ່ສໍາຄັນນີ້, ມີເຫດຜົນຫຼາຍຢ່າງທີ່ຈະນໍາໃຊ້ໄດຄວາມໄວທີ່ສາມາດປັບໄດ້. ບາງຢ່າງຂອງເຫຼົ່ານີ້ include64
➻ເພື່ອໃຫ້ປະສິດທິພາບສູງ: ໄຟຟ້າໄຟຟ້າສາມາດນໍາໃຊ້ລະດັບຄວາມກວ້າງຂອງພະລັງງານ, ຈາກ milliwatts ກັບ megawatts ສໍາລັບຄວາມໄວຕ່າງໆແລະດັ່ງນັ້ນຄ່າໃຊ້ຈ່າຍທັງຫມົດຂອງການດໍາເນີນງານລະບົບແມ່ນຫຼຸດລົງ
ເພື່ອເພີ່ມຄວາມໄວຂອງຄວາມຖືກຕ້ອງຂອງການຢຸດຫລືການປະຕິເສດວຽກງານຂອງມໍເຕີ
➻ເພື່ອຄວບຄຸມການເລີ່ມຕົ້ນຂອງການເລີ່ມຕົ້ນ
ເພື່ອໃຫ້ການປົກປ້ອງ
➻ສ້າງຕັ້ງການຄວບຄຸມແບບພິເສດດ້ວຍການປ່ຽນແປງຂອງຕົວກໍານົດການເຊັ່ນ: ອຸນຫະພູມ, ຄວາມກົດດັນ, ລະດັບ, ແລະອື່ນໆ.
ຫົວຂໍ້ທີ່ກວມເອົາໃນແອັບພລິເຄຊັນນີ້ແມ່ນໄດ້ລະບຸໄວ້ຂ້າງລຸ່ມນີ້】
⇢ມໍເຕີ DC ຫຼື Motor ກົງໂດຍກົງ
⇢ຫຼັກການເຮັດວຽກຂອງມໍເຕີສະທ້ອນສາມເຟດ
◇ຫຼັກການເຮັດວຽກຂອງຈັກກະວານ Synchronous
⇢ເຄື່ອງໄຟຟ້າພະລັງງານໄຟຟ້າ Rating
⇢ລະບົບ Motor Duty Class ແລະ Classification ຂອງມັນ
▶ການບີບອັດເຄື່ອງຈັກອັດຕະໂນມັດ Braking ກໍາປັ່ນ Regenerative ການບີບອັດແບບເຄື່ອນໄຫວຂອງ Motor Induction
⇢ອັດຕະໂນມັດຂັບລົດ | ເລີ່ມຕົ້ນການຄວບຄຸມຄວາມໄວຂອງການຄວບຄຸມຄວາມໄວຂອງເຄື່ອງຈັກໃນການຂັບຂີ່
⇢ DC Motor Drives
⇢ແບບເຄື່ອນໄຫວຂອງໄຟຟ້າ
erg Interface of Stepper Motor
◯ການຄວບຄຸມການຂັບລົດໄຟຟ້າ
⇢ Synchronous Motor Drives
⇢ Hysteresis Motor
車 Stepper Motor Drive
⇢ Bipolar Stepper Motor
⇢ແມ່ນຫຍັງຄືເບກ? Types of Braking | ການບີບອັດແບບບີບບັງຄັບແບບກໍາປັ່ນ Regenerative
ປະເພດຂອງການເບກໃນມໍເຕີ DC
⇢ເຄື່ອງຈັກ Servo ແມ່ນຫຍັງ?
⇢ Servomechanism | ຫຼັກການທິດສະດີແລະການເຮັດວຽກຂອງ Servo Motor
⇢ Servo Motor Control
⇢ DC Servo Motors | ທິດສະດີຂອງ DC Servo Motor
⇢ Servo Motor Controller ຫະລື Servo Motor Driver
⇢ Servo Motor Applications in Robotics Solar Tracking System ຯ ລະຯ
⇢ Variable Frequency Drive ຫຼື VFD
車 Electric Motors
⇢ວົງຈອນສະນະແມ່ເຫຼັກ
⇢ຊ່ອງທາງອາກາດ
⇢ການຜະລິດ Torque
⇢ Loadings ເສພາະແລະຜົນຜະລິດເສພາະ
⇢ການປ່ຽນແປງພະລັງງານ - Motional Emf
⇢ທຽບເທົ່າວົງຈອນ
⇢ສົມບັດທົ່ວໄປຂອງມໍເຕີໄຟຟ້າ
⇢ Power Electronic Converters ສໍາລັບຂັບລົດ
⇢ການຄວບຄຸມແຮງດັນ - D. Output From D.C Supply
⇢ Chopper ທີ່ມີການຄວບຄຸມການໃຊ້ແຮງດັນເກີນແຮງດັນ
⇢ D.C. ຈາກ A.C. - ການກັ່ນຕອງຄວບຄຸມ
⇢ຕົວປ່ຽນແປງ 3 ປັດຈຸບັນຄວບຄຸມຢ່າງເຕັມສ່ວນ
⇢ A ຈາກ DC SP-SP Inversion
↓ Sinusoidal PWM
⇢ອຸປະກອນຫຼັບຫຼັບໃນການປ່ຽນແປງ
포⇢⇢⇢⇢⇢⇢⇢⇢⇢⇢⇢
⇢ Conventional D.C Motors
⇢ Behavior Transient - Surges ໃນປະຈຸບັນ
⇢ Shunt, Series ແລະ Compound Motors
⇢ເຄື່ອງຈັກ Shunt - ສະຖານະພາບການດໍາເນີນງານສະຫມໍ່າສະເຫມີ
⇢ການປະຕິບັດສີ່ Quadrant ແລະການບັງຄັບໃຊ້ Regenerative
◇ການປ່ຽນແປງທີ່ມີຄວາມໄວເຕັມທີ່
⇢ Toy Motors
⇢ D. ເຄື່ອງຈັກຂັບ
⇢ປັດຈຸບັນບໍ່ສາມາດປະຕິບັດໄດ້
⇢ຕົວແປງສະມາດດ່ຽວປ່ຽນແປງໄດ
⇢ການຄວບຄຸມການຄວບຄຸມສໍາລັບໄດ CDs
⇢ Chopper-Fed D.C. Motor Drives
D. Servo Drives
⇢ The Transformer ຈິງ
⇢ເຄື່ອງໂມດູນອັດຕະໂນມັດ Inverter-Fed
ອັບເດດແລ້ວເມື່ອ
ຄວາມປອດໄພເລີ່ມດ້ວຍການເຂົ້າໃຈວ່ານັກພັດທະນາເກັບກຳ ແລະ ແບ່ງປັນຂໍ້ມູນຂອງທ່ານແນວໃດ. ວິທີປະຕິບັດກ່ຽວກັບຄວາມເປັນສ່ວນຕົວ ແລະ ຄວາມປອດໄພຂອງຂໍ້ມູນອາດຈະແຕກຕ່າງກັນອີງຕາມການນຳໃຊ້, ພາກພື້ນ ແລະ ອາຍຸຂອງທ່ານ. ນັກພັດທະນາໃຫ້ຂໍ້ມູນນີ້ ແລະ ອາດຈະອັບເດດມັນເມື່ອເວລາຜ່ານໄປ.

ແອັບນີ້ອາດຈະແບ່ງປັນປະເພດຂໍ້ມູນເຫຼົ່ານີ້ກັບພາກສ່ວນທີສາມ
ID ອຸປະກອນ ຫຼື ID ອື່ນໆ

ບໍ່ໄດ້ເກັບກຳຂໍ້ມູນ
ສຶກສາເພີ່ມເຕີມ ກ່ຽວກັບວ່ານັກພັດທະນາປະກາດການເກັບກຳຂໍ້ມູນແນວໃດ

ລະບົບຈະເຂົ້າລະຫັດຂໍ້ມູນໃນຂະນະສົ່ງ

ລຶບຂໍ້ມູນບໍ່ໄດ້
ມີຫຍັງໃໝ່
- More Topics Added
ຝ່າຍຊ່ວຍເຫຼືອຂອງແອັບ
ກ່ຽວກັບນັກພັດທະນາແອັບ
Prabhu Thankaraju
vishwasparrow@gmail.com
101-B,Nishadham Bldg,1/5
Chipale,Panvel
NAVI MUMBAI, Maharashtra 410206
India
undefined





