
Electrical Drives
Inneholder annonser
10k+
Nedlastinger

Alle
info




Om denne appen
►Elektriske stasjoner er en integrert del av industrielle og automatiseringsprosesser, spesielt der nøyaktig styring av motorens hastighet er det viktigste kravet. I tillegg har alle moderne elektriske tog eller lokomotivsystemer blitt drevet av elektriske stasjoner. Robotikk er et annet stort område hvor justerbare hastighetsdrev gir presis hastighet og posisjonskontroll
►A kjøring driver og styrer fart, dreiemoment og retning av bevegelige gjenstander. Drivene er generelt ansatt til fart- eller bevegelseskontrollapplikasjoner som maskinverktøy, transport, roboter, vifter, etc. Stasjonene som brukes til å kontrollere elektriske motorer, kalles elektriske stasjoner.
►Driftene kan være av konstant eller variabel type. Stasjonene med konstant hastighet er ineffektive for operasjoner med variabel hastighet; I slike tilfeller brukes variabel hastighetstrykk for å betjene lastene i et av et bredt spekter av hastigheter
►Drevene med justerbar hastighet er nødvendige for nøyaktig og kontinuerlig styring av hastighet, posisjon eller dreiemoment av forskjellige belastninger. Sammen med denne store funksjonen er det mange grunner til å bruke justerbare hastighetsdrifter. Noen av disse inkluderer
➻ For å oppnå høy effektivitet: Elektriske stasjoner gjør det mulig å bruke bredt spekter av kraft, fra milliwatt til megawatt for ulike hastigheter, og dermed blir den totale kostnaden ved drift av systemet redusert
➻ For å øke hastigheten på nøyaktighet ved å stoppe eller reversere operasjoner på motoren
➻ For å kontrollere startstrømmen
➻ For å gi beskyttelse
➻ Å etablere avansert kontroll med variasjon av parametere som temperatur, trykk, nivå, etc.
【Emner dekket i denne appen er oppført nedenfor】
⇢ DC Motor eller Direkte Current Motor
⇢ Arbeidsprinsipp for trefasinduksjonsmotor
⇢ Synkronmotoreregler
⇢ Elmotorkraft vurdering
⇢ Motor Duty Class og dets klassifisering
⇢ Induksjon Motorbremsing Regenerativ Plugging Dynamisk Bremsing av Induksjonsmotor
⇢ Induksjonsmotorstasjoner | Starte bremsehastighetsregulering av induksjonsmotor
⇢ DC-motorer
⇢ Dynamikk av elektriske drifter
⇢ Interfacing av Stepper Motor
⇢ Kontroll av elektriske drifter
⇢ Synkronmotordrev
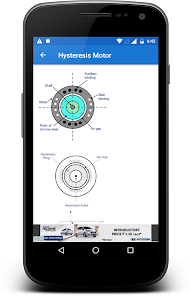
⇢ Hysteresis Motor
⇢ Stepper Motor Drive
⇢ Bipolar Stepper Motor
⇢ Hva er bremsing? Typer av bremsing | Regenerativ Plugging Dynamic Braking
⇢ Typer av bremsing i en DC-motor
⇢ Hva er Servo Motor?
⇢ Servomekanisme | Teori og arbeidsprinsipp for servomotoren
⇢ Servo Motor Control
⇢ DC Servo Motors | Theory of DC Servo Motor
⇢ Servo Motor Controller eller Servo Motor Driver
⇢ Servo Motor Applications i Robotics Solar Tracking System etc
⇢ Variabel frekvensdisk eller VFD
⇢ Elektriske motorer
⇢ Magnetiske kretser
⇢ Luftgapet
⇢ Dreiemomentproduksjon
⇢ Spesifikke belastninger og spesifikk utgang
⇢ Energikonvertering - Motional Emf
⇢ ekvivalent krets
⇢ Generelle egenskaper for elektriske motorer
⇢ Effekt elektroniske omformere for motordrevne drev
⇢ Spenningsregulering - D.C.-utgang fra D.C. Supply
⇢ Chopper med induktiv belastning - overspenningsbeskyttelse
⇢ D.C. Fra A.C. - Kontrollert Rectification
⇢ 3-faset fullt kontrollert omformer
⇢ A.C. Fra D.C. SP - SP Inversion
⇢ Sinusformet PWM
⇢ Inverter Switching Devices
⇢ Kjøling av strømbryterenheter
⇢ Konvensjonelle D.C. Motors
⇢ Forløpende oppførsel - nåværende overspenninger
⇢ Shunt, serie og sammensatte motorer
⇢ Shunt motor - stabil drift egenskaper
⇢ Fire-kvadrantoperasjon og regenerativ bremsing
⇢ Regenerativ reversering med full hastighet
⇢ Toy Motors
⇢ D.C. Motor Drives
⇢ Diskontinuerlig strøm
⇢ Omformere med omformere
⇢ Kontrollarrangementer for D.C.-stasjoner
⇢ Chopper-Fed D.C Motordrev
⇢ D.C. Servo Drives
⇢ Den virkelige transformatoren
⇢ Inverter-Fed Induksjon Motor Drives
►A kjøring driver og styrer fart, dreiemoment og retning av bevegelige gjenstander. Drivene er generelt ansatt til fart- eller bevegelseskontrollapplikasjoner som maskinverktøy, transport, roboter, vifter, etc. Stasjonene som brukes til å kontrollere elektriske motorer, kalles elektriske stasjoner.
►Driftene kan være av konstant eller variabel type. Stasjonene med konstant hastighet er ineffektive for operasjoner med variabel hastighet; I slike tilfeller brukes variabel hastighetstrykk for å betjene lastene i et av et bredt spekter av hastigheter
►Drevene med justerbar hastighet er nødvendige for nøyaktig og kontinuerlig styring av hastighet, posisjon eller dreiemoment av forskjellige belastninger. Sammen med denne store funksjonen er det mange grunner til å bruke justerbare hastighetsdrifter. Noen av disse inkluderer
➻ For å oppnå høy effektivitet: Elektriske stasjoner gjør det mulig å bruke bredt spekter av kraft, fra milliwatt til megawatt for ulike hastigheter, og dermed blir den totale kostnaden ved drift av systemet redusert
➻ For å øke hastigheten på nøyaktighet ved å stoppe eller reversere operasjoner på motoren
➻ For å kontrollere startstrømmen
➻ For å gi beskyttelse
➻ Å etablere avansert kontroll med variasjon av parametere som temperatur, trykk, nivå, etc.
【Emner dekket i denne appen er oppført nedenfor】
⇢ DC Motor eller Direkte Current Motor
⇢ Arbeidsprinsipp for trefasinduksjonsmotor
⇢ Synkronmotoreregler
⇢ Elmotorkraft vurdering
⇢ Motor Duty Class og dets klassifisering
⇢ Induksjon Motorbremsing Regenerativ Plugging Dynamisk Bremsing av Induksjonsmotor
⇢ Induksjonsmotorstasjoner | Starte bremsehastighetsregulering av induksjonsmotor
⇢ DC-motorer
⇢ Dynamikk av elektriske drifter
⇢ Interfacing av Stepper Motor
⇢ Kontroll av elektriske drifter
⇢ Synkronmotordrev
⇢ Hysteresis Motor
⇢ Stepper Motor Drive
⇢ Bipolar Stepper Motor
⇢ Hva er bremsing? Typer av bremsing | Regenerativ Plugging Dynamic Braking
⇢ Typer av bremsing i en DC-motor
⇢ Hva er Servo Motor?
⇢ Servomekanisme | Teori og arbeidsprinsipp for servomotoren
⇢ Servo Motor Control
⇢ DC Servo Motors | Theory of DC Servo Motor
⇢ Servo Motor Controller eller Servo Motor Driver
⇢ Servo Motor Applications i Robotics Solar Tracking System etc
⇢ Variabel frekvensdisk eller VFD
⇢ Elektriske motorer
⇢ Magnetiske kretser
⇢ Luftgapet
⇢ Dreiemomentproduksjon
⇢ Spesifikke belastninger og spesifikk utgang
⇢ Energikonvertering - Motional Emf
⇢ ekvivalent krets
⇢ Generelle egenskaper for elektriske motorer
⇢ Effekt elektroniske omformere for motordrevne drev
⇢ Spenningsregulering - D.C.-utgang fra D.C. Supply
⇢ Chopper med induktiv belastning - overspenningsbeskyttelse
⇢ D.C. Fra A.C. - Kontrollert Rectification
⇢ 3-faset fullt kontrollert omformer
⇢ A.C. Fra D.C. SP - SP Inversion
⇢ Sinusformet PWM
⇢ Inverter Switching Devices
⇢ Kjøling av strømbryterenheter
⇢ Konvensjonelle D.C. Motors
⇢ Forløpende oppførsel - nåværende overspenninger
⇢ Shunt, serie og sammensatte motorer
⇢ Shunt motor - stabil drift egenskaper
⇢ Fire-kvadrantoperasjon og regenerativ bremsing
⇢ Regenerativ reversering med full hastighet
⇢ Toy Motors
⇢ D.C. Motor Drives
⇢ Diskontinuerlig strøm
⇢ Omformere med omformere
⇢ Kontrollarrangementer for D.C.-stasjoner
⇢ Chopper-Fed D.C Motordrev
⇢ D.C. Servo Drives
⇢ Den virkelige transformatoren
⇢ Inverter-Fed Induksjon Motor Drives
Oppdatert
Sikkerhet starter med en forståelse av hvordan utviklere samler inn og deler dataene dine. Fremgangsmåtene for personvern og datasikkerhet kan variere basert på bruk, region og alder. Utvikleren har oppgitt denne informasjonen og kan oppdatere den over tid.

Denne appen kan dele disse datatypene med tredjeparter
Enhets-ID-er eller andre ID-er

Ingen data samles inn
Finn ut mer om hvordan utviklere deklarerer innsamling

Dataene krypteres ved overføring

Dataene kan ikke slettes
Hva er nytt?
- More Topics Added
Appstøtte
Om utvikleren
Prabhu Thankaraju
vishwasparrow@gmail.com
101-B,Nishadham Bldg,1/5
Chipale,Panvel
NAVI MUMBAI, Maharashtra 410206
India
undefined





