
Field Oriented Control of Indu
ਐਪ-ਅੰਦਰ ਖਰੀਦਾਂ

500+
ਡਾਊਨਲੋਡ

ਹਰੇਕ ਲਈ
info

ਇਸ ਐਪ ਬਾਰੇ
ਆਈਐਮ ਅਨੁਪ੍ਰਯੋਗ ਦੇ ਐਫਓਸੀ ਫੀਲਡ ਓਰੀਐਂਟਡ ਕੰਟਰੋਲ, ਵਿਦਿਆਰਥੀਆਂ ਅਤੇ ਅਧਿਆਪਕਾਂ ਨੂੰ ਇਵੇਦਸ਼ਨ ਮਸ਼ੀਨ ਦੇ ਵੈਕਟਰ ਨਿਯੰਤਰਣ ਦਾ ਅਧਿਐਨ ਕਰਨ ਅਤੇ ਸਮਝਣ ਵਿਚ ਸਹਾਇਤਾ ਕਰਦਾ ਹੈ ਅਤੇ ਇਸਦੇ ਪਰਿਵਰਤਨ ਦੇ ਵਿਹਾਰ
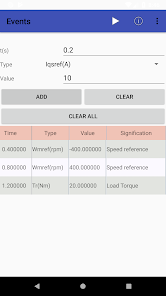
ਕਈ ਘਟਨਾਵਾਂ ਸਿਮੂਲੇਸ਼ਨ ਦੌਰਾਨ ਲਾਗੂ ਕੀਤੀਆਂ ਜਾ ਸਕਦੀਆਂ ਹਨ, ਜਿਵੇਂ ਕਿ ਵੱਖ ਵੱਖ ਸਮੇਂ ਵਿੱਚ ਲੋਡ ਟੋੱਕ ਵਿੱਚ ਤਬਦੀਲੀ, ਹਵਾਲਾ ਸਪੀਡ ਅਤੇ ਹਵਾਲਾ ਕਰੀਏਡ Idsref ਅਤੇ Iqsref, ਅਤੇ ਨਾਲ ਹੀ ਪ੍ਰਤੀਰੋਧਕ ਪੈਰਾਮੀਟਰ ਵੱਖ-ਵੱਖ.
ਸਮਰੂਪ ਸਾਂਝੇ ਕੀਤੇ ਜਾ ਸਕਦੇ ਹਨ ਅਤੇ ਹੋਰ ਐਪਸ (ਜੀਮੇਲ, ਫੋਟੋ, ਐਕਸਲ ਸ਼ੀਟਸ, ਡੌਕੂਮੈਂਟ) ਤੇ ਨਿਰਯਾਤ ਕੀਤੇ ਜਾ ਸਕਦੇ ਹਨ.
ਮੁੱਖ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ:
- ਇੰਡਕਸ਼ਨ ਮਸ਼ੀਨ (ਆਈ ਐੱਮ) ਦੇ ਵੈਕਟਰ ਨਿਯੰਤਰਣ ਦੀ ਰਫਤਾਰ ਅਤੇ ਸਪੀਡ ਅਤੇ ਮੌਜੂਦਾ ਨਿਯੰਤਰਣ ਵਿੱਚ
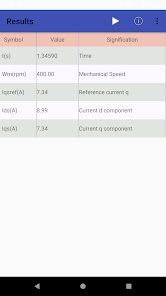
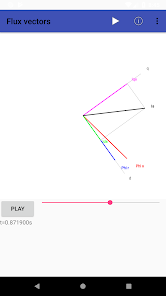
- ਇਡਸੁਰੇਫ, ਈੱਕਸਫ, ਆਈਡੀਐਸ ਕਰਵੈਂਟਸ ਅਤੇ ਵਡਸਫ, ਵੈਕਸੀਫ ਵੋਲਟੇਜਸ, ਇਲੈਕਟ੍ਰੋਮੈਗਨੈਟਿਕ ਟੋੱਕਜ਼, ਸਪੀਡ, ਰੋਟਰ ਅਤੇ ਅਲਾਰਮ-ਬੀਟਾ ਵਿਚ ਸਟੇਟਰ ਵ੍ਹੱਕਸ, ਸਮੇਂ ਦੇ ਫੰਕਸ਼ਨ ਅਤੇ ਸਥਾਈ ਰਾਜ ਦੇ ਰੂਪ
- ਕਲਾਰਕ ਅਤੇ ਪਾਰਕ ਪਰਿਵਰਤਨ ਦੇ ਕਾਰਜ ਨੂੰ ਤਿੰਨ-ਪੜਾਅ ਦੇ ਵੇਰੀਏਬਲ (ਵੋਲਟੇਜ ਅਤੇ ਕਰੰਟ)
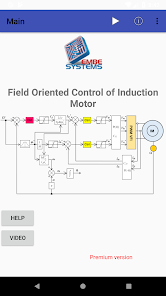
- ਫੀਲਡ ਓਰੀਐਂਟਡ ਕੰਟਰੋਲ: ਆਈਆਰਐਫਓਸੀ, ਡੀਆਰਐਫਓਸੀ, ਆਈਐਸਐਫਓਸੀ, ਡੀਐਸਐਫਓਸੀ
- ਮੌਜੂਦਾ ਕੰਟਰੋਲ (ਆਈਡੀਜ਼, ਆਈਕਐਸ) ਅਤੇ ਸਪੀਡ ਕੰਟਰੋਲ
- ਆਦਰਸ਼ ਇਨਵਾਰਟਰ (ਸਾਈਨਾਸੌਇਡਲ ਵੋਲਟੇਜ) ਜਾਂ 2-ਪੱਧਰ ਦੇ PWM (ਪਲਸ ਚੌੜਾਈ ਮਾਡਿਊਲਜ)
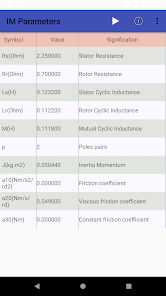
- ਮੋਟਰ ਪੈਰਾਮੀਟਰ ਬਦਲੋ ਅਤੇ ਉਹਨਾਂ ਨੂੰ ਸਥਾਨਕ ਫਾਈਲਾਂ ਵਿੱਚ ਸੁਰੱਖਿਅਤ ਕਰੋ
- ਸਿਮੂਲੇਸ਼ਨ ਵਿੱਚ ਕਈ ਲੋਡ ਟੋਕਰ ਘਟਨਾਵਾਂ, ਸਪੀਡ ਹਵਾਲਾ ... ਲਾਗੂ ਕਰੋ
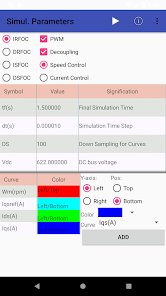
- ਸਿਮੂਲੇਸ਼ਨ ਪੈਰਾਮੀਟਰ (ਅੰਤਮ ਸਮਾਂ, ਪੜਾਅ ਵਾਰ ...)
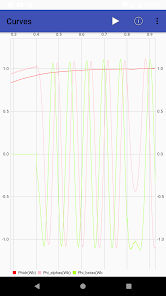
- ਵਿੰਡੋ ਨੂੰ ਦੋ ਗ੍ਰਾਫਾਂ ਵਿੱਚ ਵੰਡ ਕੇ ਵਕਰ ਨੂੰ ਵਿਖਾਉਂਦਾ ਹੈ, ਨਾਲ ਜ਼ੂਮ ਅਤੇ ਵਕਰ ਪੁਆਇੰਟ ਤੇ ਵੈਲਯੂਜ ਦਾ ਡਿਸਪਲੇਅ
ਪ੍ਰੀਮੀਅਮ ਵਰਜ਼ਨ:
- ਸਿਰਫ਼ ਟੋਕ ਘਟਨਾਵਾਂ ਦੀ ਬਜਾਏ ਵਾਧੂ ਪ੍ਰੋਗਰਾਮਾਂ (ਸਪੀਡ ਸੰਦਰਭ Wmref, Idsref, Iqsref, ਸਟੇਟਰ ਅਤੇ ਰੋਟਰ ਪ੍ਰਤੀਰੋਧ)
- ਰੰਗ ਦੀ ਚੋਣ ਦੇ ਨਾਲ 2 ਗ੍ਰਾਫਾਂ ਤੇ ਕਰਵ ਦੀ ਇੱਕ ਅਨੰਤਤਾ ਪ੍ਰਦਰਸ਼ਿਤ ਕਰੋ, ਚੋਟੀ / ਹੇਠਾਂ ਸਥਿਤੀ ਅਤੇ ਗ੍ਰਾਫ ਦਾ ਪ੍ਰਾਇਮਰੀ ਜਾਂ ਸੈਕੰਡਰੀ Y- ਧੁਰਾ ਵੇਖੋ. ਇਹ ਬੁਨਿਆਦੀ ਰੂਪ ਵਿੱਚ 3 ਕਰਵ ਤੱਕ ਸੀਮਿਤ ਹੈ
- ਪਹਿਲਾਂ ਸੰਭਾਲੇ ਹੋਏ ਸੰਰਚਨਾ ਨੂੰ ਲੋਡ ਕਰੋ, ਅਤੇ ਈ-ਮੇਲ ਰਾਹੀਂ ਉਹਨਾਂ ਨੂੰ ਸਾਂਝਾ ਕਰੋ
- ਐਕਸਪੋਰਟ ਡਾਟਾ: ਗ੍ਰਾਫ ਚਿੱਤਰ, ਗ੍ਰਾਫ ਡੇਟਾ (xls / csv), ਮਸ਼ੀਨ ਪੈਰਾਮੀਟਰ
- ਅਤੇ ਬੇਸ਼ਕ ਤੁਸੀਂ ਡਿਵੈਲਪਰ ਦੀ ਮਦਦ ਕਰਦੇ ਹੋ, ਜੋ ਵਿੱਦਿਅਕ ਐਪਸ ਵਿਕਸਿਤ ਕਰਨ ਦੇ ਉਸ ਦੇ ਪਹੁੰਚ ਵਿੱਚ, ਇਲੈਕਟ੍ਰੀਕਲ ਇੰਜੀਨੀਅਰਿੰਗ ਵਿੱਚ ਇੱਕ ਅਧਿਆਪਕ ਅਤੇ ਖੋਜਕਰਤਾ ਹੈ
ਕਈ ਘਟਨਾਵਾਂ ਸਿਮੂਲੇਸ਼ਨ ਦੌਰਾਨ ਲਾਗੂ ਕੀਤੀਆਂ ਜਾ ਸਕਦੀਆਂ ਹਨ, ਜਿਵੇਂ ਕਿ ਵੱਖ ਵੱਖ ਸਮੇਂ ਵਿੱਚ ਲੋਡ ਟੋੱਕ ਵਿੱਚ ਤਬਦੀਲੀ, ਹਵਾਲਾ ਸਪੀਡ ਅਤੇ ਹਵਾਲਾ ਕਰੀਏਡ Idsref ਅਤੇ Iqsref, ਅਤੇ ਨਾਲ ਹੀ ਪ੍ਰਤੀਰੋਧਕ ਪੈਰਾਮੀਟਰ ਵੱਖ-ਵੱਖ.
ਸਮਰੂਪ ਸਾਂਝੇ ਕੀਤੇ ਜਾ ਸਕਦੇ ਹਨ ਅਤੇ ਹੋਰ ਐਪਸ (ਜੀਮੇਲ, ਫੋਟੋ, ਐਕਸਲ ਸ਼ੀਟਸ, ਡੌਕੂਮੈਂਟ) ਤੇ ਨਿਰਯਾਤ ਕੀਤੇ ਜਾ ਸਕਦੇ ਹਨ.
ਮੁੱਖ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ:
- ਇੰਡਕਸ਼ਨ ਮਸ਼ੀਨ (ਆਈ ਐੱਮ) ਦੇ ਵੈਕਟਰ ਨਿਯੰਤਰਣ ਦੀ ਰਫਤਾਰ ਅਤੇ ਸਪੀਡ ਅਤੇ ਮੌਜੂਦਾ ਨਿਯੰਤਰਣ ਵਿੱਚ
- ਇਡਸੁਰੇਫ, ਈੱਕਸਫ, ਆਈਡੀਐਸ ਕਰਵੈਂਟਸ ਅਤੇ ਵਡਸਫ, ਵੈਕਸੀਫ ਵੋਲਟੇਜਸ, ਇਲੈਕਟ੍ਰੋਮੈਗਨੈਟਿਕ ਟੋੱਕਜ਼, ਸਪੀਡ, ਰੋਟਰ ਅਤੇ ਅਲਾਰਮ-ਬੀਟਾ ਵਿਚ ਸਟੇਟਰ ਵ੍ਹੱਕਸ, ਸਮੇਂ ਦੇ ਫੰਕਸ਼ਨ ਅਤੇ ਸਥਾਈ ਰਾਜ ਦੇ ਰੂਪ
- ਕਲਾਰਕ ਅਤੇ ਪਾਰਕ ਪਰਿਵਰਤਨ ਦੇ ਕਾਰਜ ਨੂੰ ਤਿੰਨ-ਪੜਾਅ ਦੇ ਵੇਰੀਏਬਲ (ਵੋਲਟੇਜ ਅਤੇ ਕਰੰਟ)
- ਫੀਲਡ ਓਰੀਐਂਟਡ ਕੰਟਰੋਲ: ਆਈਆਰਐਫਓਸੀ, ਡੀਆਰਐਫਓਸੀ, ਆਈਐਸਐਫਓਸੀ, ਡੀਐਸਐਫਓਸੀ
- ਮੌਜੂਦਾ ਕੰਟਰੋਲ (ਆਈਡੀਜ਼, ਆਈਕਐਸ) ਅਤੇ ਸਪੀਡ ਕੰਟਰੋਲ
- ਆਦਰਸ਼ ਇਨਵਾਰਟਰ (ਸਾਈਨਾਸੌਇਡਲ ਵੋਲਟੇਜ) ਜਾਂ 2-ਪੱਧਰ ਦੇ PWM (ਪਲਸ ਚੌੜਾਈ ਮਾਡਿਊਲਜ)
- ਮੋਟਰ ਪੈਰਾਮੀਟਰ ਬਦਲੋ ਅਤੇ ਉਹਨਾਂ ਨੂੰ ਸਥਾਨਕ ਫਾਈਲਾਂ ਵਿੱਚ ਸੁਰੱਖਿਅਤ ਕਰੋ
- ਸਿਮੂਲੇਸ਼ਨ ਵਿੱਚ ਕਈ ਲੋਡ ਟੋਕਰ ਘਟਨਾਵਾਂ, ਸਪੀਡ ਹਵਾਲਾ ... ਲਾਗੂ ਕਰੋ
- ਸਿਮੂਲੇਸ਼ਨ ਪੈਰਾਮੀਟਰ (ਅੰਤਮ ਸਮਾਂ, ਪੜਾਅ ਵਾਰ ...)
- ਵਿੰਡੋ ਨੂੰ ਦੋ ਗ੍ਰਾਫਾਂ ਵਿੱਚ ਵੰਡ ਕੇ ਵਕਰ ਨੂੰ ਵਿਖਾਉਂਦਾ ਹੈ, ਨਾਲ ਜ਼ੂਮ ਅਤੇ ਵਕਰ ਪੁਆਇੰਟ ਤੇ ਵੈਲਯੂਜ ਦਾ ਡਿਸਪਲੇਅ
ਪ੍ਰੀਮੀਅਮ ਵਰਜ਼ਨ:
- ਸਿਰਫ਼ ਟੋਕ ਘਟਨਾਵਾਂ ਦੀ ਬਜਾਏ ਵਾਧੂ ਪ੍ਰੋਗਰਾਮਾਂ (ਸਪੀਡ ਸੰਦਰਭ Wmref, Idsref, Iqsref, ਸਟੇਟਰ ਅਤੇ ਰੋਟਰ ਪ੍ਰਤੀਰੋਧ)
- ਰੰਗ ਦੀ ਚੋਣ ਦੇ ਨਾਲ 2 ਗ੍ਰਾਫਾਂ ਤੇ ਕਰਵ ਦੀ ਇੱਕ ਅਨੰਤਤਾ ਪ੍ਰਦਰਸ਼ਿਤ ਕਰੋ, ਚੋਟੀ / ਹੇਠਾਂ ਸਥਿਤੀ ਅਤੇ ਗ੍ਰਾਫ ਦਾ ਪ੍ਰਾਇਮਰੀ ਜਾਂ ਸੈਕੰਡਰੀ Y- ਧੁਰਾ ਵੇਖੋ. ਇਹ ਬੁਨਿਆਦੀ ਰੂਪ ਵਿੱਚ 3 ਕਰਵ ਤੱਕ ਸੀਮਿਤ ਹੈ
- ਪਹਿਲਾਂ ਸੰਭਾਲੇ ਹੋਏ ਸੰਰਚਨਾ ਨੂੰ ਲੋਡ ਕਰੋ, ਅਤੇ ਈ-ਮੇਲ ਰਾਹੀਂ ਉਹਨਾਂ ਨੂੰ ਸਾਂਝਾ ਕਰੋ
- ਐਕਸਪੋਰਟ ਡਾਟਾ: ਗ੍ਰਾਫ ਚਿੱਤਰ, ਗ੍ਰਾਫ ਡੇਟਾ (xls / csv), ਮਸ਼ੀਨ ਪੈਰਾਮੀਟਰ
- ਅਤੇ ਬੇਸ਼ਕ ਤੁਸੀਂ ਡਿਵੈਲਪਰ ਦੀ ਮਦਦ ਕਰਦੇ ਹੋ, ਜੋ ਵਿੱਦਿਅਕ ਐਪਸ ਵਿਕਸਿਤ ਕਰਨ ਦੇ ਉਸ ਦੇ ਪਹੁੰਚ ਵਿੱਚ, ਇਲੈਕਟ੍ਰੀਕਲ ਇੰਜੀਨੀਅਰਿੰਗ ਵਿੱਚ ਇੱਕ ਅਧਿਆਪਕ ਅਤੇ ਖੋਜਕਰਤਾ ਹੈ
ਅੱਪਡੇਟ ਕਰਨ ਦੀ ਤਾਰੀਖ
ਸੁਰੱਖਿਆ ਇਸ ਗੱਲ ਨੂੰ ਸਮਝਣ ਨਾਲ ਸ਼ੁਰੂ ਹੁੰਦੀ ਹੈ ਕਿ ਵਿਕਾਸਕਾਰ ਵੱਲੋਂ ਤੁਹਾਡੇ ਡਾਟੇ ਨੂੰ ਕਿਸ ਤਰ੍ਹਾਂ ਇਕੱਤਰ ਅਤੇ ਸਾਂਝਾ ਕੀਤਾ ਜਾਂਦਾ ਹੈ। ਡਾਟਾ ਪਰਦੇਦਾਰੀ ਅਤੇ ਸੁਰੱਖਿਆ ਵਿਹਾਰ ਤੁਹਾਡੀ ਵਰਤੋਂ, ਖੇਤਰ ਅਤੇ ਉਮਰ ਦੇ ਮੁਤਾਬਕ ਵੱਖ-ਵੱਖ ਹੋ ਸਕਦੇ ਹਨ। ਵਿਕਾਸਕਾਰ ਵੱਲੋਂ ਇਸ ਜਾਣਕਾਰੀ ਨੂੰ ਮੁਹੱਈਆ ਕਰਵਾਇਆ ਗਿਆ ਹੈ ਅਤੇ ਉਸਦੇ ਵੱਲੋਂ ਸਮੇਂ ਦੇ ਨਾਲ ਇਸਨੂੰ ਅੱਪਡੇਟ ਕੀਤਾ ਜਾ ਸਕਦਾ ਹੈ।


ਨਵਾਂ ਕੀ ਹੈ
V1.13, adapted to AndroidX
ਐਪ ਸਹਾਇਤਾ
ਵਿਕਾਸਕਾਰ ਬਾਰੇ
BAGHLI Lotfi
im_support@embesystems.com
447 Av. de la Libération
54000 Nancy
France
undefined





