
LiDAR VR Viewer
የውስጠ-መተግበሪያ ግዢዎች
3.7star
1.12 ሺ ግምገማዎች
50 ሺ+
ውርዶች

ሁሉም ሰው
info

ስለዚህ መተግበሪያ
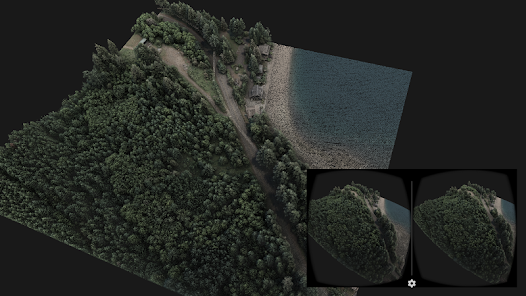
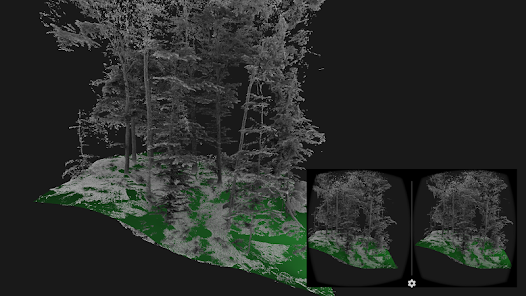
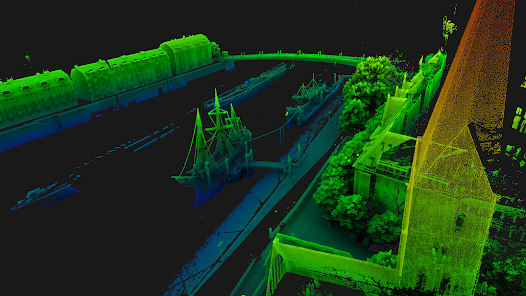
LiDAR VR ተመልካች ምናባዊ እውነታ በኩል መሳጭ ተሞክሮ እንደ ነጥብ ደመና እና ክፍል ቦታዎች መካከል ምስላዊ ቁርጠኛ ነው. የብሉቱዝ መቆጣጠሪያ እና Google ካርቶን ያሉ ቀላል ራስ-mounted ማሳያ ጋር, ይህን ለመመርመር እና 3-ል ውሂብ ለማሰስ ኃይለኛ መሣሪያ ወደ ይቀይረዋል.
ይህን መተግበሪያ የሚያብራራ ሳይንሳዊ ወረቀት (2017) ኮምፒውተር ግራፊክስ, ከምስል, የኮምፒውተር ራዕይ እና ምስል በመስራት ላይ 11 ኛው ዓለም አቀፍ ኮንፈረንስ ላይ ሂደቶች ላይ ታትሟል
ባህሪያት:
• ምናባዊ እውነታን ራስ ለ ማዳበር ማሳያዎች ሊፈናጠጥ እንደ Google የካርቶን አለው
• በ OpenGL ES 2.0 በመጠቀም ሁሉም-ቤተኛ አተረጓጎም
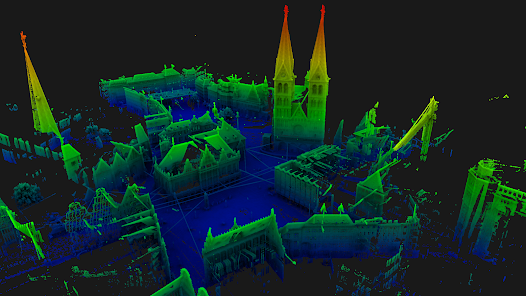
• ነጥብ ደመና አስኪ ፋይሎችን ይደግፋል
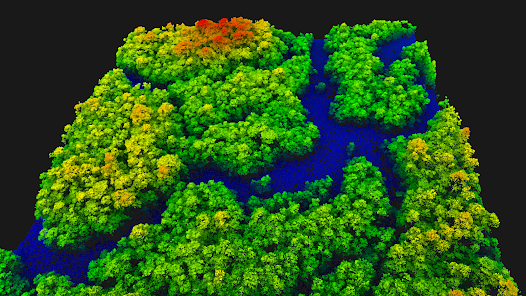
የከፍታ, ጫና ያለው ወይም አርጂቢ ዋጋዎች ከ • ቀለማት ነጥቦች
surfel እንደ የተተረጎመው normals ጋር • ይደግፋል ነጥብ ደመና, (በሂደት ላይ ስራ)
• ጥቂት በሚሊዮን የሚቆጠሩ ነጥቦች እስከ ነጥብ ደመና ይደግፋል (ወደ ዘመናዊ ስልክ ጂፒዩ ላይ ይወሰናል)
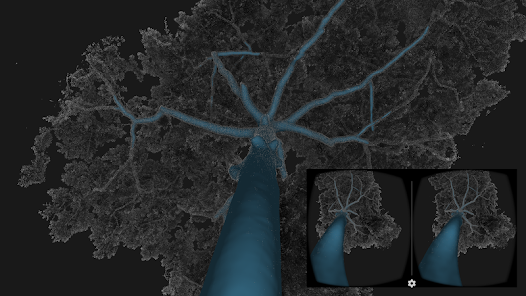
• ወለል Wavefront .obj ፋይሎችን ወንፊት ይደግፋል
ሰማያዊ-ጥርስ ተቆጣጣሪ ወይም ማያንካ ጋር • መቆጣጠሪያ ካሜራ እንቅስቃሴ
• * የአዲስ * ማሳያ ፋይሎችን ለማውረድ-የሚችል መጀመሪያ ማያ ገጽ
መጀመሪያ ማያ ምናሌ ውስጥ ዝርዝር ሰማያዊ-ጥርስ መቆጣጠሪያ መካከል • * የአዲስ * አዝራር ጉድኝት
በቲቪ ላይ 3 ዲ አምሳያ ለማሰራጨት • * የአዲስ * በመውሰድ ሁነታ (ሀ መቆጣጠሪያ ያስፈልገዋል)
ማሳሰቢያ:
በስእሉ እንደሚታየው በአሁኑ ጊዜ አይደገፍም የግቤት ASCII ፋይሎች ራስጌ ያለ ናቸው (ዘ አምዶች ቦታ ቁምፊ የተለዩ መሆን አለበት: "")
• 3 አምዶች X Y Z:
1,234 2,567 3,891
• 4 አምዶች X Y Z ጫና (ተንሳፈፈ):
1.234 2.567 3.891 0.2
• 6 አምዶች X Y Z R ገ ቢ [ከ0-255]:
1.234 2.567 3.891 125 250 135
• 6 አምዶች X Y Z Nx NY NZ (መጋጠሚያዎች + normals):
1.234 2.567 3.891 0.11 0.07 0.91
ይህን መተግበሪያ የሚያብራራ ሳይንሳዊ ወረቀት (2017) ኮምፒውተር ግራፊክስ, ከምስል, የኮምፒውተር ራዕይ እና ምስል በመስራት ላይ 11 ኛው ዓለም አቀፍ ኮንፈረንስ ላይ ሂደቶች ላይ ታትሟል
ባህሪያት:
• ምናባዊ እውነታን ራስ ለ ማዳበር ማሳያዎች ሊፈናጠጥ እንደ Google የካርቶን አለው
• በ OpenGL ES 2.0 በመጠቀም ሁሉም-ቤተኛ አተረጓጎም
• ነጥብ ደመና አስኪ ፋይሎችን ይደግፋል
የከፍታ, ጫና ያለው ወይም አርጂቢ ዋጋዎች ከ • ቀለማት ነጥቦች
surfel እንደ የተተረጎመው normals ጋር • ይደግፋል ነጥብ ደመና, (በሂደት ላይ ስራ)
• ጥቂት በሚሊዮን የሚቆጠሩ ነጥቦች እስከ ነጥብ ደመና ይደግፋል (ወደ ዘመናዊ ስልክ ጂፒዩ ላይ ይወሰናል)
• ወለል Wavefront .obj ፋይሎችን ወንፊት ይደግፋል
ሰማያዊ-ጥርስ ተቆጣጣሪ ወይም ማያንካ ጋር • መቆጣጠሪያ ካሜራ እንቅስቃሴ
• * የአዲስ * ማሳያ ፋይሎችን ለማውረድ-የሚችል መጀመሪያ ማያ ገጽ
መጀመሪያ ማያ ምናሌ ውስጥ ዝርዝር ሰማያዊ-ጥርስ መቆጣጠሪያ መካከል • * የአዲስ * አዝራር ጉድኝት
በቲቪ ላይ 3 ዲ አምሳያ ለማሰራጨት • * የአዲስ * በመውሰድ ሁነታ (ሀ መቆጣጠሪያ ያስፈልገዋል)
ማሳሰቢያ:
በስእሉ እንደሚታየው በአሁኑ ጊዜ አይደገፍም የግቤት ASCII ፋይሎች ራስጌ ያለ ናቸው (ዘ አምዶች ቦታ ቁምፊ የተለዩ መሆን አለበት: "")
• 3 አምዶች X Y Z:
1,234 2,567 3,891
• 4 አምዶች X Y Z ጫና (ተንሳፈፈ):
1.234 2.567 3.891 0.2
• 6 አምዶች X Y Z R ገ ቢ [ከ0-255]:
1.234 2.567 3.891 125 250 135
• 6 አምዶች X Y Z Nx NY NZ (መጋጠሚያዎች + normals):
1.234 2.567 3.891 0.11 0.07 0.91
የተዘመነው በ


ደረጃዎች እና ግምገማዎች
3.7
1.11 ሺ ግምገማዎች
ምን አዲስ ነገር አለ
Cel shading is now combined with SSAO for a better visual result
Previous version:
- Bug fix: openGL depth got buggy in the last version
- Experimental feature: cel shading to enhance the point clouds visualization
- Screen touch control now available again
- Added one extra demo dataset: 4 millions points forest LiDAR scan
Previous version:
- Bug fix: openGL depth got buggy in the last version
- Experimental feature: cel shading to enhance the point clouds visualization
- Screen touch control now available again
- Added one extra demo dataset: 4 millions points forest LiDAR scan