
LiDAR VR Viewer
Compres des de l'aplicació
3,7star
1,12 k ressenyes
50 k+
Baixades

Per a tots els públics
info

Sobre l'aplicació
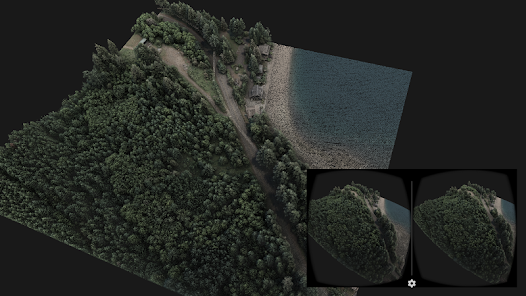
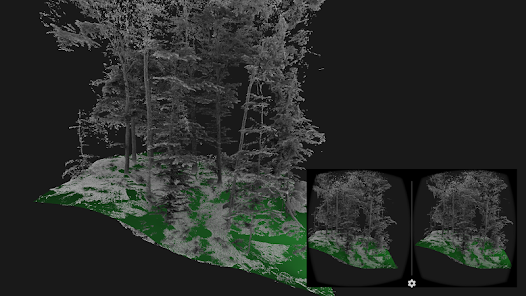
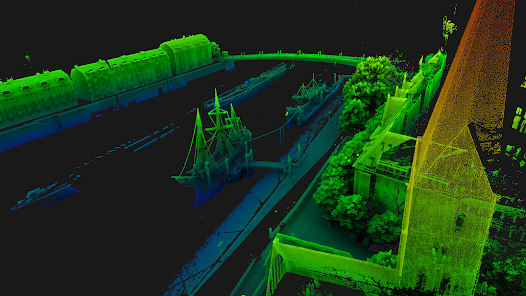
Lidar VR Visor està dedicada a la visualització de núvols de punts i superfícies com una experiència d'immersió a través de la realitat virtual. Amb un controlador de Bluetooth i una senzilla pantalla muntada al cap com Google cartró, que es converteix en una eina poderosa per investigar i explorar dades en 3D.
Un article científic que descriu aquesta aplicació ha estat publicat en les actes de la 11a Conferència Internacional sobre Computació Gràfica, la visualització, la visió artificial i processament d'imatges (2017)
característiques:
• Desenvolupat per al cap de realitat virtual pantalles muntades de manera té Google de cartró
• prestació All-nativa utilitzant OpenGL ÉS 2.0
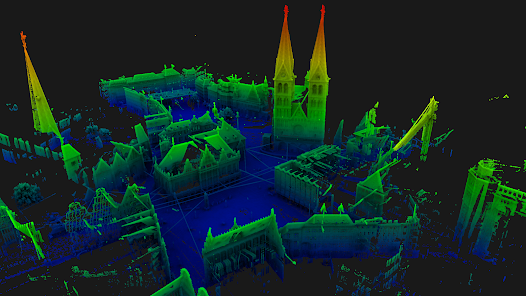
• Suporta fitxers ASCII de núvols de punts
• Els colors dels punts d'elevació dels valors RGB, intensitat o
• Suporta núvol de punts amb normals, rendit com les surfel (treball en progrés)
• Compatible amb els núvols de punts fins a uns punts milions (depèn de la GPU telèfon intel·ligent)
• Compatible amb malla de superfície arxius Wavefront .obj
• Control de moviment de la càmera amb el controlador-dent blau o la pantalla tàctil
• * * Nous arxius de demostració descàrrega-poder des de la pantalla d'inici
• * Nou * Assignació de botons del controlador de dent blau es detalla al menú de la pantalla d'inici
• * * Nova manera de bastidor per difondre el model 3D a la televisió (requereix un controlador)
Nota:
Els arxius ASCII d'entrada admesos actualment són els següents, sense capçalera (les columnes han d'estar separats per caràcter d'espai: "")
• 3 columnes X Y Z:
1,234 2,567 3,891
• 4 columnes X Y Z intensitat (float):
1,234 2,567 3,891 0,2
• 6 columnes X Z R G B [0-255]:
1,234 2,567 3,891 125.250.135
• 6 columnes X Y Z Nx Ny Nz (coordenades + normals):
1,234 2,567 3,891 0,11 0,07 0,91
Un article científic que descriu aquesta aplicació ha estat publicat en les actes de la 11a Conferència Internacional sobre Computació Gràfica, la visualització, la visió artificial i processament d'imatges (2017)
característiques:
• Desenvolupat per al cap de realitat virtual pantalles muntades de manera té Google de cartró
• prestació All-nativa utilitzant OpenGL ÉS 2.0
• Suporta fitxers ASCII de núvols de punts
• Els colors dels punts d'elevació dels valors RGB, intensitat o
• Suporta núvol de punts amb normals, rendit com les surfel (treball en progrés)
• Compatible amb els núvols de punts fins a uns punts milions (depèn de la GPU telèfon intel·ligent)
• Compatible amb malla de superfície arxius Wavefront .obj
• Control de moviment de la càmera amb el controlador-dent blau o la pantalla tàctil
• * * Nous arxius de demostració descàrrega-poder des de la pantalla d'inici
• * Nou * Assignació de botons del controlador de dent blau es detalla al menú de la pantalla d'inici
• * * Nova manera de bastidor per difondre el model 3D a la televisió (requereix un controlador)
Nota:
Els arxius ASCII d'entrada admesos actualment són els següents, sense capçalera (les columnes han d'estar separats per caràcter d'espai: "")
• 3 columnes X Y Z:
1,234 2,567 3,891
• 4 columnes X Y Z intensitat (float):
1,234 2,567 3,891 0,2
• 6 columnes X Z R G B [0-255]:
1,234 2,567 3,891 125.250.135
• 6 columnes X Y Z Nx Ny Nz (coordenades + normals):
1,234 2,567 3,891 0,11 0,07 0,91
Data d'actualització:
La seguretat comença en entendre com els desenvolupadors recullen i comparteixen les teves dades. Les pràctiques de privadesa i seguretat de les dades poden variar segons l'ús que es fa de l'aplicació, la regió i l'edat. El desenvolupador ha proporcionat aquesta informació i és possible que l'actualitzi al llarg del temps.

No es comparteixen dades amb tercers
Més informació sobre com els desenvolupadors declaren la compartició de dades

No es recullen dades
Més informació sobre com els desenvolupadors declaren la recollida de dades
Puntuacions i ressenyes
3,7
1,11 k ressenyes
Novetats
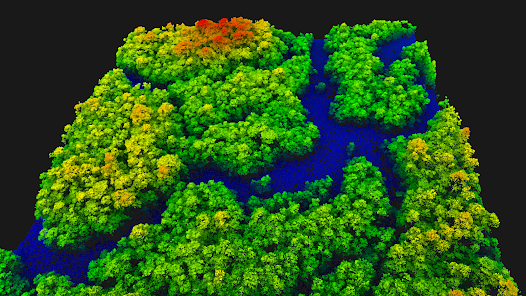
Cel shading is now combined with SSAO for a better visual result
Previous version:
- Bug fix: openGL depth got buggy in the last version
- Experimental feature: cel shading to enhance the point clouds visualization
- Screen touch control now available again
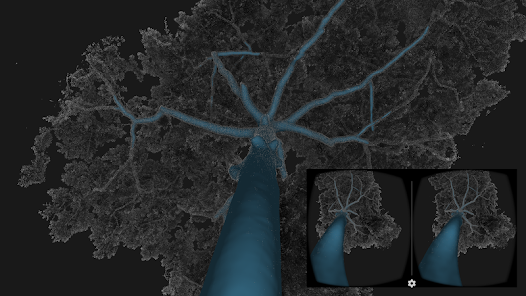
- Added one extra demo dataset: 4 millions points forest LiDAR scan
Previous version:
- Bug fix: openGL depth got buggy in the last version
- Experimental feature: cel shading to enhance the point clouds visualization
- Screen touch control now available again
- Added one extra demo dataset: 4 millions points forest LiDAR scan