

RoboCam
Conté anuncis

4,0star
142 ressenyes
10 k+
Baixades

Per a tots els públics
info



Sobre l'aplicació
Amb RoboCam podeu controlar el vostre propi robot LEGO Mindstorms EV3, Android o Raspberry Pi.
Guia d'inici ràpid (només per a aquells que tinguin un kit educatiu de LEGO Mindstorms EV3 (45544)):
1. Assembleu Researcher EV3 (la instrucció: https://goo.gl/yPU4sa), engegueu-la i assegureu-vos que Bluetooth funciona.
2. Instal·leu l’aplicació RoboCam en un telèfon intel·ligent (en endavant, Telèfon 1).
3. Activeu el Bluetooth 1 del telèfon i assegureu-vos que Phone 1 i EV3 estiguin connectats a través de Bluetooth (han d'estar emparellats).
4. Connecteu el telèfon 1 i el telèfon intel·ligent que utilitzareu per controlar el robot (d'ara endavant, Telèfon 2) al mateix router Wi-Fi.
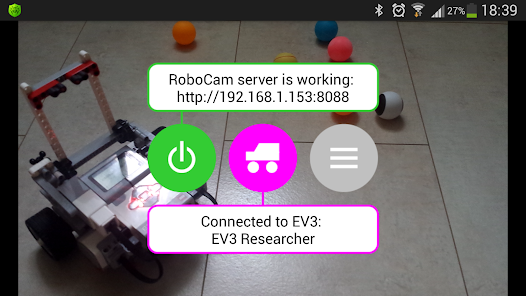
5. Inicieu un servidor RoboCam. Per això premeu el botó verd esquerre.
6. Connecteu el telèfon 1 al robot. Per a això, premeu el botó magenta al mig.
7. Obriu Google Chrome a Phone 2 i aneu a l'enllaç que es mostra a l'aplicació RoboCam a Phone 1.
8. Inicieu sessió al telèfon 2 (per defecte utilitzeu admin i 123).
9. Al telèfon 2 apareixen dos joysticks i vídeos de la càmera del telèfon. 1. Bloquejar el telèfon i connectar-lo al robot.
10. Ara podeu controlar el vostre robot a través de Phone 2.
Si teniu un kit domèstic de LEGO Mindstorms EV3 (31313) o voleu controlar un altre robot EV3 en lloc de Researcher EV3, haureu de configurar l'aplicació RoboCam. Vegeu la configuració de RoboCam.
Per utilitzar l’aplicació heu de conèixer dues coses: com configurar la connexió i com passa el control.
Aquest és el manual ràpid de configurar la connexió estàndard. Necessiteu: robot EV3, smartphone Android amb el RoboCam instal·lat (en endavant, Telèfon 1) i el telèfon intel·ligent o tauleta (Android, iOS o Windows) amb un modern navegador compatible amb HTML5 (d'ara endavant, el Phone 2). El telèfon 1 està connectat a l'EV3 mitjançant Bluetooth (els dispositius han d'estar preparats prèviament). Després d'iniciar el servidor RoboCam al telèfon 1 i connectar el telèfon 1 i el telèfon 2 al mateix router WiFi, podeu connectar-vos al servidor de RoboCam (al telèfon 1) mitjançant el navegador (des del telèfon 2). Per fer-ho, heu d’escriure l’adreça al camp d’adreça del navegador que es mostrarà a RoboCam, per exemple, http://192.168.1.2:8088
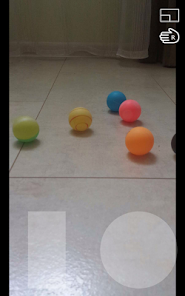
Aquesta és la breu descripció de com succeeix el control. Després de connectar-vos al servidor RoboCam a través d'un navegador de Phone 2 i entrar a l'aplicació web de RoboCam, veureu tot el que veu la càmera de Phone 1. Connecteu el telèfon 1 al vostre robot, de manera que la càmera es dirigeix cap endavant. L'aplicació web al telèfon 2 pot tenir d'1 a 4 joysticks per controlar el robot segons la configuració. Quan toqueu el joystick, les coordenades dels punts tàctils es transfereixen a l'aplicació RoboCam al telèfon 1 i, en funció de la configuració del joystick, es transformaran en les ordres del motor EV3 o s'envien a les bústies EV3. Si les coordenades s’envien a les bústies de correu, haureu d’escriure un programa EV3 addicional per processar-les. Els noms de les bústies de correu segueix: x i y - joystick 1, w i z - joystick 2, a i b - joystick 3, c i d - joystick 4.
Per defecte, l'aplicació només té un paràmetre per a un robot: "Investigador EV3", que podeu veure al vídeo. Podeu muntar EV3 Researcher des d'un kit educatiu de LEGO Mindstorms EV3 (45544). : https://goo.gl/yPU4sa
Guia d'inici ràpid (només per a aquells que tinguin un kit educatiu de LEGO Mindstorms EV3 (45544)):
1. Assembleu Researcher EV3 (la instrucció: https://goo.gl/yPU4sa), engegueu-la i assegureu-vos que Bluetooth funciona.
2. Instal·leu l’aplicació RoboCam en un telèfon intel·ligent (en endavant, Telèfon 1).
3. Activeu el Bluetooth 1 del telèfon i assegureu-vos que Phone 1 i EV3 estiguin connectats a través de Bluetooth (han d'estar emparellats).
4. Connecteu el telèfon 1 i el telèfon intel·ligent que utilitzareu per controlar el robot (d'ara endavant, Telèfon 2) al mateix router Wi-Fi.
5. Inicieu un servidor RoboCam. Per això premeu el botó verd esquerre.
6. Connecteu el telèfon 1 al robot. Per a això, premeu el botó magenta al mig.
7. Obriu Google Chrome a Phone 2 i aneu a l'enllaç que es mostra a l'aplicació RoboCam a Phone 1.
8. Inicieu sessió al telèfon 2 (per defecte utilitzeu admin i 123).
9. Al telèfon 2 apareixen dos joysticks i vídeos de la càmera del telèfon. 1. Bloquejar el telèfon i connectar-lo al robot.
10. Ara podeu controlar el vostre robot a través de Phone 2.
Si teniu un kit domèstic de LEGO Mindstorms EV3 (31313) o voleu controlar un altre robot EV3 en lloc de Researcher EV3, haureu de configurar l'aplicació RoboCam. Vegeu la configuració de RoboCam.
Per utilitzar l’aplicació heu de conèixer dues coses: com configurar la connexió i com passa el control.
Aquest és el manual ràpid de configurar la connexió estàndard. Necessiteu: robot EV3, smartphone Android amb el RoboCam instal·lat (en endavant, Telèfon 1) i el telèfon intel·ligent o tauleta (Android, iOS o Windows) amb un modern navegador compatible amb HTML5 (d'ara endavant, el Phone 2). El telèfon 1 està connectat a l'EV3 mitjançant Bluetooth (els dispositius han d'estar preparats prèviament). Després d'iniciar el servidor RoboCam al telèfon 1 i connectar el telèfon 1 i el telèfon 2 al mateix router WiFi, podeu connectar-vos al servidor de RoboCam (al telèfon 1) mitjançant el navegador (des del telèfon 2). Per fer-ho, heu d’escriure l’adreça al camp d’adreça del navegador que es mostrarà a RoboCam, per exemple, http://192.168.1.2:8088
Aquesta és la breu descripció de com succeeix el control. Després de connectar-vos al servidor RoboCam a través d'un navegador de Phone 2 i entrar a l'aplicació web de RoboCam, veureu tot el que veu la càmera de Phone 1. Connecteu el telèfon 1 al vostre robot, de manera que la càmera es dirigeix cap endavant. L'aplicació web al telèfon 2 pot tenir d'1 a 4 joysticks per controlar el robot segons la configuració. Quan toqueu el joystick, les coordenades dels punts tàctils es transfereixen a l'aplicació RoboCam al telèfon 1 i, en funció de la configuració del joystick, es transformaran en les ordres del motor EV3 o s'envien a les bústies EV3. Si les coordenades s’envien a les bústies de correu, haureu d’escriure un programa EV3 addicional per processar-les. Els noms de les bústies de correu segueix: x i y - joystick 1, w i z - joystick 2, a i b - joystick 3, c i d - joystick 4.
Per defecte, l'aplicació només té un paràmetre per a un robot: "Investigador EV3", que podeu veure al vídeo. Podeu muntar EV3 Researcher des d'un kit educatiu de LEGO Mindstorms EV3 (45544). : https://goo.gl/yPU4sa
Data d'actualització:
La seguretat comença en entendre com els desenvolupadors recullen i comparteixen les teves dades. Les pràctiques de privadesa i seguretat de les dades poden variar segons l'ús que es fa de l'aplicació, la regió i l'edat. El desenvolupador ha proporcionat aquesta informació i és possible que l'actualitzi al llarg del temps.

No es comparteixen dades amb tercers
Més informació sobre com els desenvolupadors declaren la compartició de dades

No es recullen dades
Més informació sobre com els desenvolupadors declaren la recollida de dades
Novetats
Version 1.4.4
Fixed a lack of the menu for Add and Delete buttons on Android 7.
Version 1.4.3
Fixed an error while changing the screen orientation in Android 6 and later.
Version 1.4.2
Added local controls.
Version 1.3.1
Added a support for nonstandard platforms like Arduino and Raspberry Pi.
Version 1.2
1. Added a control via a keyboard (to update "Researcher EV3" settings you need to delete them first!!!).
2. Added an ability to run your EV3 program.
Fixed a lack of the menu for Add and Delete buttons on Android 7.
Version 1.4.3
Fixed an error while changing the screen orientation in Android 6 and later.
Version 1.4.2
Added local controls.
Version 1.3.1
Added a support for nonstandard platforms like Arduino and Raspberry Pi.
Version 1.2
1. Added a control via a keyboard (to update "Researcher EV3" settings you need to delete them first!!!).
2. Added an ability to run your EV3 program.