

RoboCam
Indeholder annoncer

4,0star
142 anmeldelser
10 t+
Downloads

Alle
info



Om denne app
Ved hjælp af RoboCam kan du styre din egen LEGO Mindstorms EV3, Android eller Raspberry Pi robot.
Hurtigstartguide (kun for dem, der har et pædagogisk sæt af LEGO Mindstorms EV3 (45544)):
1. Saml Researcher EV3 (instruktionen: https://goo.gl/yPU4sa), tænd den og sørg for, at Bluetooth fungerer.
2. Installer RoboCam app på en smartphone (herefter telefon 1).
3. Slå Bluetooth af Telefon 1 til og sørg for, at Telefon 1 og EV3 er tilsluttet via Bluetooth (de skal parres).
4. Tilslut telefon 1 og smartphone, som du vil bruge til at styre robotten (herefter Telefon 2) til den samme Wi-Fi-router.
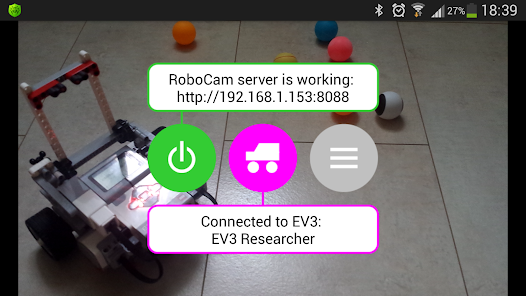
5. Start en RoboCam-server. Tryk herefter på den venstre grønne knap.
6. Slut telefon 1 til robotten. For dette skub magenta knappen i midten.
7. Åbn Google Chrome på telefon 2 og gå til det link, der vises i RoboCam-appen på telefon 1.
8. Log på på Telefon 2 (som standard bruger admin og 123).
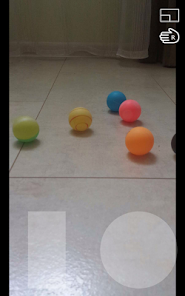
9. På telefon 2 vises to joysticks og video fra kameraet i telefon 1. Lås telefonen og fastgør den til robotten.
10. Nu kan du styre din robot via telefon 2.
Hvis du har et hjemmesæt af LEGO Mindstorms EV3 (31313) eller du vil styre anden EV3 robot i stedet for Researcher EV3, skal du oprette RoboCam app. Se RoboCam indstillinger.
For at bruge programmet skal du kende to ting: hvordan man opretter forbindelsen og hvordan kontrollen sker.
Det er den hurtige manual om indstilling af standardforbindelsen. Behov: EV3 robot, Android-smartphone med den installerede RoboCam (herefter Phone 1) og smartphone eller tablet (Android, iOS eller Windows) med en moderne browser, der understøttes HTML5 (herefter Phone 2). Telefon 1 er tilsluttet EV3 via Bluetooth (enheder skal være parret!). Når du har startet RoboCam-serveren på Telefon 1 og forbinder Telefon 1 og Telefon 2 til den samme WiFi-router, kan du oprette forbindelse til RoboCam-serveren (til Telefon 1) via browseren (fra Telefon 2). For at gøre dette skal du skrive adressen i browserens adressefelt, der vil blive vist i RoboCam for eksempel http://192.168.1.2:8088
Det er den korte beskrivelse af, hvordan kontrollen sker. Efter at du har oprettet forbindelse til RoboCam-serveren via en browser af Telefon 2 og indtastet RoboCam Web-applikationen, vil du se alt, hvad kameraet i Telefon 1 ser. Vedhæft telefon 1 til din robot, så kameraet er rettet fremad. Webapp på telefon 2 kan have fra 1 til 4 joysticks til at styre robotten afhængigt af indstillingerne. Når du rører joysticket, overføres koordinaterne til berøringspunkterne til RoboCam-applikationen på Telefon 1, og derefter ændres de til EV3-motorkommandoerne eller sendes til EV3-postkasser afhængigt af joystick-indstillingerne. Hvis koordinaterne sendes til postkasser, skal du skrive et ekstra EV3-program til behandling af dem. Navnene på postkasserne følger: x og y - joystick 1, w og z - joystick 2, a og b - joystick 3, c og d - joystick 4.
Programmet har som standard en indstilling til kun en af robotterne - EV3-forskeren, som du kan se på videoen. Du kan samle EV3-forsker fra et undervisningssæt af LEGO Mindstorms EV3 (45544). Download linkforskerens bygningskredsløb : https://goo.gl/yPU4sa
Hurtigstartguide (kun for dem, der har et pædagogisk sæt af LEGO Mindstorms EV3 (45544)):
1. Saml Researcher EV3 (instruktionen: https://goo.gl/yPU4sa), tænd den og sørg for, at Bluetooth fungerer.
2. Installer RoboCam app på en smartphone (herefter telefon 1).
3. Slå Bluetooth af Telefon 1 til og sørg for, at Telefon 1 og EV3 er tilsluttet via Bluetooth (de skal parres).
4. Tilslut telefon 1 og smartphone, som du vil bruge til at styre robotten (herefter Telefon 2) til den samme Wi-Fi-router.
5. Start en RoboCam-server. Tryk herefter på den venstre grønne knap.
6. Slut telefon 1 til robotten. For dette skub magenta knappen i midten.
7. Åbn Google Chrome på telefon 2 og gå til det link, der vises i RoboCam-appen på telefon 1.
8. Log på på Telefon 2 (som standard bruger admin og 123).
9. På telefon 2 vises to joysticks og video fra kameraet i telefon 1. Lås telefonen og fastgør den til robotten.
10. Nu kan du styre din robot via telefon 2.
Hvis du har et hjemmesæt af LEGO Mindstorms EV3 (31313) eller du vil styre anden EV3 robot i stedet for Researcher EV3, skal du oprette RoboCam app. Se RoboCam indstillinger.
For at bruge programmet skal du kende to ting: hvordan man opretter forbindelsen og hvordan kontrollen sker.
Det er den hurtige manual om indstilling af standardforbindelsen. Behov: EV3 robot, Android-smartphone med den installerede RoboCam (herefter Phone 1) og smartphone eller tablet (Android, iOS eller Windows) med en moderne browser, der understøttes HTML5 (herefter Phone 2). Telefon 1 er tilsluttet EV3 via Bluetooth (enheder skal være parret!). Når du har startet RoboCam-serveren på Telefon 1 og forbinder Telefon 1 og Telefon 2 til den samme WiFi-router, kan du oprette forbindelse til RoboCam-serveren (til Telefon 1) via browseren (fra Telefon 2). For at gøre dette skal du skrive adressen i browserens adressefelt, der vil blive vist i RoboCam for eksempel http://192.168.1.2:8088
Det er den korte beskrivelse af, hvordan kontrollen sker. Efter at du har oprettet forbindelse til RoboCam-serveren via en browser af Telefon 2 og indtastet RoboCam Web-applikationen, vil du se alt, hvad kameraet i Telefon 1 ser. Vedhæft telefon 1 til din robot, så kameraet er rettet fremad. Webapp på telefon 2 kan have fra 1 til 4 joysticks til at styre robotten afhængigt af indstillingerne. Når du rører joysticket, overføres koordinaterne til berøringspunkterne til RoboCam-applikationen på Telefon 1, og derefter ændres de til EV3-motorkommandoerne eller sendes til EV3-postkasser afhængigt af joystick-indstillingerne. Hvis koordinaterne sendes til postkasser, skal du skrive et ekstra EV3-program til behandling af dem. Navnene på postkasserne følger: x og y - joystick 1, w og z - joystick 2, a og b - joystick 3, c og d - joystick 4.
Programmet har som standard en indstilling til kun en af robotterne - EV3-forskeren, som du kan se på videoen. Du kan samle EV3-forsker fra et undervisningssæt af LEGO Mindstorms EV3 (45544). Download linkforskerens bygningskredsløb : https://goo.gl/yPU4sa
Opdateret
For at du kan beskytte dine data, er det vigtigt at sætte sig ind i, hvordan udviklere indsamler og deler disse data. Databeskyttelses- og sikkerhedsprocedurer kan variere afhængigt af din brug, din region og din alder. Udvikleren har leveret disse oplysninger og kan løbende opdatere dem.

Der deles ikke data med tredjeparter
Få flere oplysninger om, hvordan udviklere angiver, at de deler data

Der blev ikke indsamlet data
Få flere oplysninger om, hvordan udviklere angiver, at de indsamler data
Nyheder
Version 1.4.4
Fixed a lack of the menu for Add and Delete buttons on Android 7.
Version 1.4.3
Fixed an error while changing the screen orientation in Android 6 and later.
Version 1.4.2
Added local controls.
Version 1.3.1
Added a support for nonstandard platforms like Arduino and Raspberry Pi.
Version 1.2
1. Added a control via a keyboard (to update "Researcher EV3" settings you need to delete them first!!!).
2. Added an ability to run your EV3 program.
Fixed a lack of the menu for Add and Delete buttons on Android 7.
Version 1.4.3
Fixed an error while changing the screen orientation in Android 6 and later.
Version 1.4.2
Added local controls.
Version 1.3.1
Added a support for nonstandard platforms like Arduino and Raspberry Pi.
Version 1.2
1. Added a control via a keyboard (to update "Researcher EV3" settings you need to delete them first!!!).
2. Added an ability to run your EV3 program.