

RoboCam
Enthält Werbung

4.0star
142 Rezensionen
10’000+
Downloads

Jedes Alter
info



Über diese App
Mit RoboCam können Sie Ihren eigenen LEGO Mindstorms EV3-, Android- oder Raspberry Pi-Roboter mit dem FPV steuern.
Schnellstartanleitung (nur für diejenigen, die ein Lern-Kit für LEGO Mindstorms EV3 (45544) besitzen):
1. Bauen Sie den Researcher EV3 zusammen (Anleitung: https://goo.gl/yPU4sa), schalten Sie ihn ein und vergewissern Sie sich, dass Bluetooth funktioniert.
2. Installieren Sie die RoboCam-App auf einem Smartphone (im Folgenden: Telefon 1).
3. Schalten Sie Bluetooth von Telefon 1 ein und stellen Sie sicher, dass Telefon 1 und EV3 über Bluetooth verbunden sind (sie müssen gekoppelt sein).
4. Verbinden Sie Telefon 1 und Smartphone, mit denen Sie den Roboter steuern möchten (im Folgenden Telefon 2), mit demselben Wi-Fi-Router.
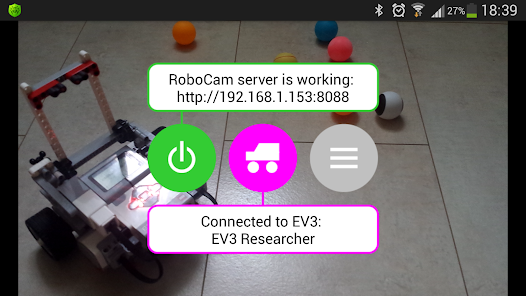
5. Starten Sie einen RoboCam-Server. Drücken Sie dazu den linken grünen Knopf.
6. Verbinden Sie Telefon 1 mit dem Roboter. Drücken Sie dazu die Magenta-Taste in der Mitte.
7. Öffnen Sie Google Chrome auf Telefon 2 und rufen Sie den Link auf, der in der RoboCam-App auf Telefon 1 angezeigt wird.
8. Melden Sie sich bei Telefon 2 an (verwenden Sie standardmäßig admin und 123).
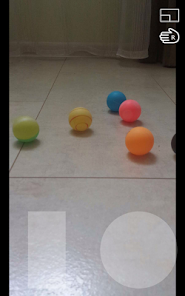
9. Auf Telefon 2 erscheinen zwei Joysticks und ein Video von der Kamera von Telefon 1. Sperren Sie das Telefon und befestigen Sie es am Roboter.
10. Jetzt können Sie Ihren Roboter über Telefon 2 steuern.
Wenn Sie ein Home-Kit von LEGO Mindstorms EV3 (31313) haben oder anstelle von Researcher EV3 einen anderen EV3-Roboter steuern möchten, müssen Sie die RoboCam-App einrichten. Siehe RoboCam-Einstellungen.
Um die Anwendung verwenden zu können, müssen Sie zwei Dinge wissen: Wie wird die Verbindung hergestellt und wie erfolgt die Steuerung?
Dies ist die Kurzanleitung zum Einstellen der Standardverbindung. Bedarf: EV3-Roboter, Android-Smartphone mit der installierten RoboCam (im Folgenden: Telefon 1) und Smartphone oder Tablet (Android, iOS oder Windows) mit einem modernen Browser, der HTML5 (im Folgenden: Telefon 2) unterstützt. Telefon 1 ist über Bluetooth mit dem EV3 verbunden (Geräte müssen vorab gekoppelt werden!). Nachdem Sie den RoboCam-Server auf Telefon 1 gestartet und Telefon 1 und Telefon 2 mit demselben WLAN-Router verbunden haben, können Sie über einen Browser (von Telefon 2 aus) eine Verbindung zum RoboCam-Server (zu Telefon 1) herstellen. Dazu müssen Sie die Adresse in das Adressfeld des Browsers schreiben, das in RoboCam angezeigt wird, z. B. http://192.168.1.2:8088
Das ist die kurze Beschreibung, wie die Steuerung erfolgt. Nachdem Sie über einen Browser von Telefon 2 eine Verbindung zum RoboCam-Server hergestellt und die RoboCam-Webanwendung aufgerufen haben, sehen Sie alles, was die Kamera von Telefon 1 sieht. Befestigen Sie das Telefon 1 an Ihrem Roboter, sodass die Kamera nach vorne gerichtet ist. Die Web-App auf Telefon 2 kann je nach Einstellung 1 bis 4 Joysticks zur Steuerung des Roboters enthalten. Wenn Sie den Joystick berühren, werden die Koordinaten der Berührungspunkte an die RoboCam-Anwendung auf Telefon 1 übertragen und dann, abhängig von den Joystick-Einstellungen, in die EV3-Motorbefehle umgewandelt oder an EV3-Mailboxen gesendet. Wenn die Koordinaten an Postfächer gesendet werden, müssen Sie ein zusätzliches EV3-Programm schreiben, um sie zu verarbeiten. Die Postfächer haben folgende Namen: x und y - Joystick 1, w und z - Joystick 2, a und b - Joystick 3, c und d - Joystick 4.
Standardmäßig hat die Anwendung eine Einstellung für nur einen der Roboter - "EV3 Researcher", die Sie im Video sehen können. Sie können EV3 Researcher aus einem Schulungskit von LEGO Mindstorms EV3 (45544) zusammenstellen : https://goo.gl/yPU4sa
Schnellstartanleitung (nur für diejenigen, die ein Lern-Kit für LEGO Mindstorms EV3 (45544) besitzen):
1. Bauen Sie den Researcher EV3 zusammen (Anleitung: https://goo.gl/yPU4sa), schalten Sie ihn ein und vergewissern Sie sich, dass Bluetooth funktioniert.
2. Installieren Sie die RoboCam-App auf einem Smartphone (im Folgenden: Telefon 1).
3. Schalten Sie Bluetooth von Telefon 1 ein und stellen Sie sicher, dass Telefon 1 und EV3 über Bluetooth verbunden sind (sie müssen gekoppelt sein).
4. Verbinden Sie Telefon 1 und Smartphone, mit denen Sie den Roboter steuern möchten (im Folgenden Telefon 2), mit demselben Wi-Fi-Router.
5. Starten Sie einen RoboCam-Server. Drücken Sie dazu den linken grünen Knopf.
6. Verbinden Sie Telefon 1 mit dem Roboter. Drücken Sie dazu die Magenta-Taste in der Mitte.
7. Öffnen Sie Google Chrome auf Telefon 2 und rufen Sie den Link auf, der in der RoboCam-App auf Telefon 1 angezeigt wird.
8. Melden Sie sich bei Telefon 2 an (verwenden Sie standardmäßig admin und 123).
9. Auf Telefon 2 erscheinen zwei Joysticks und ein Video von der Kamera von Telefon 1. Sperren Sie das Telefon und befestigen Sie es am Roboter.
10. Jetzt können Sie Ihren Roboter über Telefon 2 steuern.
Wenn Sie ein Home-Kit von LEGO Mindstorms EV3 (31313) haben oder anstelle von Researcher EV3 einen anderen EV3-Roboter steuern möchten, müssen Sie die RoboCam-App einrichten. Siehe RoboCam-Einstellungen.
Um die Anwendung verwenden zu können, müssen Sie zwei Dinge wissen: Wie wird die Verbindung hergestellt und wie erfolgt die Steuerung?
Dies ist die Kurzanleitung zum Einstellen der Standardverbindung. Bedarf: EV3-Roboter, Android-Smartphone mit der installierten RoboCam (im Folgenden: Telefon 1) und Smartphone oder Tablet (Android, iOS oder Windows) mit einem modernen Browser, der HTML5 (im Folgenden: Telefon 2) unterstützt. Telefon 1 ist über Bluetooth mit dem EV3 verbunden (Geräte müssen vorab gekoppelt werden!). Nachdem Sie den RoboCam-Server auf Telefon 1 gestartet und Telefon 1 und Telefon 2 mit demselben WLAN-Router verbunden haben, können Sie über einen Browser (von Telefon 2 aus) eine Verbindung zum RoboCam-Server (zu Telefon 1) herstellen. Dazu müssen Sie die Adresse in das Adressfeld des Browsers schreiben, das in RoboCam angezeigt wird, z. B. http://192.168.1.2:8088
Das ist die kurze Beschreibung, wie die Steuerung erfolgt. Nachdem Sie über einen Browser von Telefon 2 eine Verbindung zum RoboCam-Server hergestellt und die RoboCam-Webanwendung aufgerufen haben, sehen Sie alles, was die Kamera von Telefon 1 sieht. Befestigen Sie das Telefon 1 an Ihrem Roboter, sodass die Kamera nach vorne gerichtet ist. Die Web-App auf Telefon 2 kann je nach Einstellung 1 bis 4 Joysticks zur Steuerung des Roboters enthalten. Wenn Sie den Joystick berühren, werden die Koordinaten der Berührungspunkte an die RoboCam-Anwendung auf Telefon 1 übertragen und dann, abhängig von den Joystick-Einstellungen, in die EV3-Motorbefehle umgewandelt oder an EV3-Mailboxen gesendet. Wenn die Koordinaten an Postfächer gesendet werden, müssen Sie ein zusätzliches EV3-Programm schreiben, um sie zu verarbeiten. Die Postfächer haben folgende Namen: x und y - Joystick 1, w und z - Joystick 2, a und b - Joystick 3, c und d - Joystick 4.
Standardmäßig hat die Anwendung eine Einstellung für nur einen der Roboter - "EV3 Researcher", die Sie im Video sehen können. Sie können EV3 Researcher aus einem Schulungskit von LEGO Mindstorms EV3 (45544) zusammenstellen : https://goo.gl/yPU4sa
Aktualisiert am
Was die Sicherheit angeht, solltest du nachvollziehen, wie Entwickler deine Daten erheben und weitergeben. Die Datenschutz- und Sicherheitspraktiken können je nach Verwendung, Region und Alter des Nutzers variieren. Diese Informationen wurden vom Entwickler zur Verfügung gestellt und können jederzeit von ihm geändert werden.

Keine Daten werden mit Drittunternehmen oder -organisationen geteilt

Keine Daten erhoben
Neuigkeiten
Version 1.4.4
Fixed a lack of the menu for Add and Delete buttons on Android 7.
Version 1.4.3
Fixed an error while changing the screen orientation in Android 6 and later.
Version 1.4.2
Added local controls.
Version 1.3.1
Added a support for nonstandard platforms like Arduino and Raspberry Pi.
Version 1.2
1. Added a control via a keyboard (to update "Researcher EV3" settings you need to delete them first!!!).
2. Added an ability to run your EV3 program.
Fixed a lack of the menu for Add and Delete buttons on Android 7.
Version 1.4.3
Fixed an error while changing the screen orientation in Android 6 and later.
Version 1.4.2
Added local controls.
Version 1.3.1
Added a support for nonstandard platforms like Arduino and Raspberry Pi.
Version 1.2
1. Added a control via a keyboard (to update "Researcher EV3" settings you need to delete them first!!!).
2. Added an ability to run your EV3 program.