

RoboCam
Contén anuncios

4,0star
142 recensións
10.000+
Descargas

Todos
info



Acerca desta aplicación
Usando RoboCam pode controlar o seu propio FPGV LEGO Mindstorms EV3, Android ou Raspberry Pi.
Guía de inicio rápido (só para aqueles que teñan un kit educativo de LEGO Mindstorms EV3 (45544)):
1. Instala o Investigador EV3 (a instrución: https://goo.gl/yPU4sa), acéndoo e asegúrese de que Bluetooth estea funcionando.
2. Instala a aplicación RoboCam nun smartphone (en adiante, Teléfono 1).
3. Active o Bluetooth 1 do teléfono e asegúrese de que o teléfono 1 eo EV3 estean conectados a través de Bluetooth (deben estar emparellados).
4. Conecte o teléfono 1 e o smartphone que usará para controlar o robot (en adiante, o teléfono 2) ao mesmo router Wi-Fi.
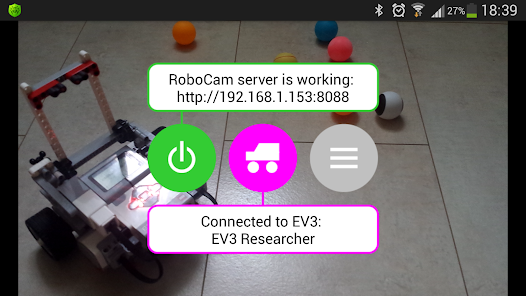
5. Iniciar un servidor RoboCam. Para isto preme o botón verde esquerdo.
6. Conecta o teléfono 1 co robot. Para isto, preme o botón magenta no medio.
7. Abre Google Chrome no Phone 2 e accede á ligazón que aparece na aplicación RoboCam no Phone 1.
8. Inicie sesión no teléfono 2 (por defecto use admin e 123).
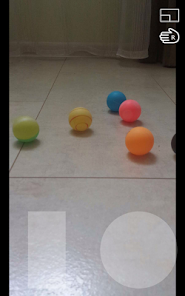
9. No teléfono 2 aparecen dous joysticks e un vídeo desde a cámara do teléfono. 1. Bloquear o teléfono e engadilo ao robot.
10. Agora podes controlar o teu robot a través de Phone 2.
Se tes un kit de casa de LEGO Mindstorms EV3 (31313) ou queres controlar outro robot EV3 no canto de Researcher EV3, cómpre configurar a aplicación RoboCam. Vexa a configuración de RoboCam.
Para usar a aplicación é necesario coñecer dúas cousas: como configurar a conexión e como pasa o control.
Este é o manual rápido sobre como configurar a conexión estándar. Necesidade: robot EV3, smartphone Android co RoboCam instalado (en adiante, Phone 1) e o smartphone ou tablet (Android, iOS ou Windows) cun navegador moderno que soporta HTML5 (en adiante, o Phone 2). O teléfono 1 está conectado ao EV3 mediante Bluetooth (¡os dispositivos deben estar previamente emparejados!). Despois de iniciar o servidor RoboCam no teléfono 1 e conectar o teléfono 1 e o teléfono 2 ao mesmo router WiFi, pode conectarse ao servidor de RoboCam (a teléfono 1) a través do navegador (desde o teléfono 2). Para facelo, cómpre escribir o enderezo no campo de enderezo do navegador que se mostrará en RoboCam, por exemplo, http://192.168.1.2:8088
Esa é a breve descrición de como ocorre o control. Despois de conectar co servidor RoboCam a través dun navegador de Phone 2 e entrar na aplicación web RoboCam, verá todo o que ve a cámara do Phone 1. Conecte o teléfono 1 ao seu robot, polo que a cámara está dirixida cara a adiante. A aplicación web en Phone 2 pode ter de 1 a 4 joysticks para controlar o robot en función da configuración. Ao tocar o joystick, as coordenadas dos puntos táctiles transfírense á aplicación RoboCam no teléfono 1 e, dependendo das opcións do joystick, transfórmanse aos comandos do motor EV3 ou envíanse ás caixas de correo EV3. Se as coordenadas son enviadas a caixas de correo, cómpre escribir un programa EV3 adicional para procesalo. Os nomes das caixas de correo seguen: x e y - joystick 1, w e z - joystick 2, a e b - joystick 3, c e d - joystick 4.
Por defecto, a aplicación ten unha configuración para un só robot: "Investigador EV3", que podes ver no vídeo. Podes montar o Investigador EV3 desde un kit educativo de LEGO Mindstorms EV3 (45544). Descargar ligazóns. : https://goo.gl/yPU4sa
Guía de inicio rápido (só para aqueles que teñan un kit educativo de LEGO Mindstorms EV3 (45544)):
1. Instala o Investigador EV3 (a instrución: https://goo.gl/yPU4sa), acéndoo e asegúrese de que Bluetooth estea funcionando.
2. Instala a aplicación RoboCam nun smartphone (en adiante, Teléfono 1).
3. Active o Bluetooth 1 do teléfono e asegúrese de que o teléfono 1 eo EV3 estean conectados a través de Bluetooth (deben estar emparellados).
4. Conecte o teléfono 1 e o smartphone que usará para controlar o robot (en adiante, o teléfono 2) ao mesmo router Wi-Fi.
5. Iniciar un servidor RoboCam. Para isto preme o botón verde esquerdo.
6. Conecta o teléfono 1 co robot. Para isto, preme o botón magenta no medio.
7. Abre Google Chrome no Phone 2 e accede á ligazón que aparece na aplicación RoboCam no Phone 1.
8. Inicie sesión no teléfono 2 (por defecto use admin e 123).
9. No teléfono 2 aparecen dous joysticks e un vídeo desde a cámara do teléfono. 1. Bloquear o teléfono e engadilo ao robot.
10. Agora podes controlar o teu robot a través de Phone 2.
Se tes un kit de casa de LEGO Mindstorms EV3 (31313) ou queres controlar outro robot EV3 no canto de Researcher EV3, cómpre configurar a aplicación RoboCam. Vexa a configuración de RoboCam.
Para usar a aplicación é necesario coñecer dúas cousas: como configurar a conexión e como pasa o control.
Este é o manual rápido sobre como configurar a conexión estándar. Necesidade: robot EV3, smartphone Android co RoboCam instalado (en adiante, Phone 1) e o smartphone ou tablet (Android, iOS ou Windows) cun navegador moderno que soporta HTML5 (en adiante, o Phone 2). O teléfono 1 está conectado ao EV3 mediante Bluetooth (¡os dispositivos deben estar previamente emparejados!). Despois de iniciar o servidor RoboCam no teléfono 1 e conectar o teléfono 1 e o teléfono 2 ao mesmo router WiFi, pode conectarse ao servidor de RoboCam (a teléfono 1) a través do navegador (desde o teléfono 2). Para facelo, cómpre escribir o enderezo no campo de enderezo do navegador que se mostrará en RoboCam, por exemplo, http://192.168.1.2:8088
Esa é a breve descrición de como ocorre o control. Despois de conectar co servidor RoboCam a través dun navegador de Phone 2 e entrar na aplicación web RoboCam, verá todo o que ve a cámara do Phone 1. Conecte o teléfono 1 ao seu robot, polo que a cámara está dirixida cara a adiante. A aplicación web en Phone 2 pode ter de 1 a 4 joysticks para controlar o robot en función da configuración. Ao tocar o joystick, as coordenadas dos puntos táctiles transfírense á aplicación RoboCam no teléfono 1 e, dependendo das opcións do joystick, transfórmanse aos comandos do motor EV3 ou envíanse ás caixas de correo EV3. Se as coordenadas son enviadas a caixas de correo, cómpre escribir un programa EV3 adicional para procesalo. Os nomes das caixas de correo seguen: x e y - joystick 1, w e z - joystick 2, a e b - joystick 3, c e d - joystick 4.
Por defecto, a aplicación ten unha configuración para un só robot: "Investigador EV3", que podes ver no vídeo. Podes montar o Investigador EV3 desde un kit educativo de LEGO Mindstorms EV3 (45544). Descargar ligazóns. : https://goo.gl/yPU4sa
Última actualización
A seguranza pasa por entender como recompilan e comparten os teus datos os programadores. As prácticas relacionadas coa seguranza e a privacidade dos datos utilizadas poden variar en función do uso, a rexión e a idade. O programador facilitou esta información e pode modificala co paso do tempo.

Non se comparten datos con terceiros
Máis información sobre como fan os programadores declaracións acerca dos datos que comparten

Non se recompila ningún dato
Máis información sobre como fan os programadores declaracións acerca da recompilación de datos
Novidades
Version 1.4.4
Fixed a lack of the menu for Add and Delete buttons on Android 7.
Version 1.4.3
Fixed an error while changing the screen orientation in Android 6 and later.
Version 1.4.2
Added local controls.
Version 1.3.1
Added a support for nonstandard platforms like Arduino and Raspberry Pi.
Version 1.2
1. Added a control via a keyboard (to update "Researcher EV3" settings you need to delete them first!!!).
2. Added an ability to run your EV3 program.
Fixed a lack of the menu for Add and Delete buttons on Android 7.
Version 1.4.3
Fixed an error while changing the screen orientation in Android 6 and later.
Version 1.4.2
Added local controls.
Version 1.3.1
Added a support for nonstandard platforms like Arduino and Raspberry Pi.
Version 1.2
1. Added a control via a keyboard (to update "Researcher EV3" settings you need to delete them first!!!).
2. Added an ability to run your EV3 program.