

RoboCam
Sadrži oglase

4,0star
142 recenzije
10 tis.+
Preuzimanja

Svi
info



O ovoj aplikaciji
Koristeći RoboCam možete FPV kontrolirati svoj vlastiti LEGO Mindstorms EV3, Android ili Raspberry Pi robota.
Vodič za brzi početak (samo za one koji imaju obrazovni komplet LEGO Mindstorms EV3 (45544)):
1. Sastavite istraživača EV3 (upute: https://goo.gl/yPU4sa), uključite ga i provjerite radi li Bluetooth.
2. Instalirajte aplikaciju RoboCam na pametnom telefonu (u daljnjem tekstu: Telefon 1).
3. Uključite Bluetooth telefon 1 i provjerite jesu li Telefon 1 i EV3 spojeni putem Bluetootha (moraju biti upareni).
4. Povežite Telefon 1 i pametni telefon koji ćete koristiti za upravljanje robotom (u daljnjem tekstu Telefon 2) s istim Wi-Fi usmjerivačem.
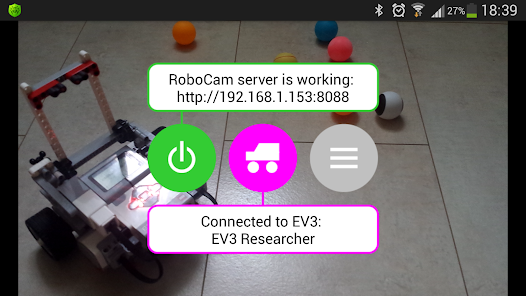
5. Pokrenite RoboCam poslužitelj. Za to pritisnite lijevu zelenu tipku.
6. Povežite telefon 1 s robotom. Za to pritisnite gumb magenta u sredini.
7. Otvorite Google Chrome na telefonu 2 i idite na vezu koja je prikazana u aplikaciji RoboCam na telefonu 1.
8. Prijavite se na Telefon 2 (prema zadanim postavkama koristite admin i 123).
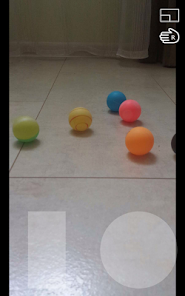
9. Na telefonu 2 pojavljuju se dvije upravljačke palice i videozapis s kamere telefona 1. Zaključajte telefon i priključite ga na robota.
10. Sada možete upravljati svojim robotom putem telefona 2.
Ako imate kućni komplet LEGO Mindstorms EV3 (31313) ili želite upravljati drugim EV3 robotom umjesto istraživačem EV3, morate postaviti RoboCam aplikaciju. Pogledajte postavke RoboCam.
Da biste koristili aplikaciju morate znati dvije stvari: kako postaviti vezu i kako se kontrola događa.
To je brzi priručnik za postavljanje standardne veze. Trebate: EV3 robot, Android-smartphone s instaliranim RoboCamom (u daljnjem tekstu Telefon 1) i pametnim telefonom ili tabletom (Android, iOS ili Windows) s modernim preglednikom koji podržava HTML5 (u daljnjem tekstu Telefon 2). Telefon 1 je spojen na EV3 putem Bluetootha (uređaji moraju biti prethodno upareni!). Nakon pokretanja RoboCam poslužitelja na Telefon 1 i spajanja Telefon 1 i Telefon 2 na isti WiFi-ruter, možete se povezati na RoboCam poslužitelj (na Telefon 1) putem preglednika (iz Telefon 2). Da biste to učinili, morate upisati adresu u polje adrese preglednika koje će biti prikazano na primjer u RoboCamu, http://192.168.1.2:8088
To je kratak opis načina na koji se kontrola događa. Nakon spajanja na RoboCam poslužitelj putem preglednika Phone 2 i ulaska u RoboCam Web aplikaciju, vidjet ćete sve što fotoaparat telefona 1 vidi. Priložite Telefon 1 svom robotu, tako da je njegova kamera usmjerena naprijed. Web aplikacija na telefonu 2 može imati od 1 do 4 upravljačke palice za upravljanje robotom ovisno o postavkama. Kada dodirnete navigacijsku tipku, koordinate dodirnih točaka prenose se u aplikaciju RoboCam na telefonu 1, a zatim se, ovisno o postavkama navigacijske tipke, transformiraju u EV3 motorne naredbe ili šalju u EV3 poštanske sandučiće. Ako su koordinate poslane poštanskim sandučićima, potrebno je napisati dodatni EV3 program za njihovu obradu. Nazivi poštanskih sandučića su sljedeći: x i y - joystick 1, w i z - joystick 2, a i b - joystick 3, c i d - joystick 4.
Prema zadanim postavkama aplikacija ima postavku samo za jednog robota - "EV3 Researcher", koji možete vidjeti na videozapisu.Možete sastaviti EV3 istraživača iz obrazovnog kompleta LEGO Mindstorms EV3 (45544). : https://goo.gl/yPU4sa
Vodič za brzi početak (samo za one koji imaju obrazovni komplet LEGO Mindstorms EV3 (45544)):
1. Sastavite istraživača EV3 (upute: https://goo.gl/yPU4sa), uključite ga i provjerite radi li Bluetooth.
2. Instalirajte aplikaciju RoboCam na pametnom telefonu (u daljnjem tekstu: Telefon 1).
3. Uključite Bluetooth telefon 1 i provjerite jesu li Telefon 1 i EV3 spojeni putem Bluetootha (moraju biti upareni).
4. Povežite Telefon 1 i pametni telefon koji ćete koristiti za upravljanje robotom (u daljnjem tekstu Telefon 2) s istim Wi-Fi usmjerivačem.
5. Pokrenite RoboCam poslužitelj. Za to pritisnite lijevu zelenu tipku.
6. Povežite telefon 1 s robotom. Za to pritisnite gumb magenta u sredini.
7. Otvorite Google Chrome na telefonu 2 i idite na vezu koja je prikazana u aplikaciji RoboCam na telefonu 1.
8. Prijavite se na Telefon 2 (prema zadanim postavkama koristite admin i 123).
9. Na telefonu 2 pojavljuju se dvije upravljačke palice i videozapis s kamere telefona 1. Zaključajte telefon i priključite ga na robota.
10. Sada možete upravljati svojim robotom putem telefona 2.
Ako imate kućni komplet LEGO Mindstorms EV3 (31313) ili želite upravljati drugim EV3 robotom umjesto istraživačem EV3, morate postaviti RoboCam aplikaciju. Pogledajte postavke RoboCam.
Da biste koristili aplikaciju morate znati dvije stvari: kako postaviti vezu i kako se kontrola događa.
To je brzi priručnik za postavljanje standardne veze. Trebate: EV3 robot, Android-smartphone s instaliranim RoboCamom (u daljnjem tekstu Telefon 1) i pametnim telefonom ili tabletom (Android, iOS ili Windows) s modernim preglednikom koji podržava HTML5 (u daljnjem tekstu Telefon 2). Telefon 1 je spojen na EV3 putem Bluetootha (uređaji moraju biti prethodno upareni!). Nakon pokretanja RoboCam poslužitelja na Telefon 1 i spajanja Telefon 1 i Telefon 2 na isti WiFi-ruter, možete se povezati na RoboCam poslužitelj (na Telefon 1) putem preglednika (iz Telefon 2). Da biste to učinili, morate upisati adresu u polje adrese preglednika koje će biti prikazano na primjer u RoboCamu, http://192.168.1.2:8088
To je kratak opis načina na koji se kontrola događa. Nakon spajanja na RoboCam poslužitelj putem preglednika Phone 2 i ulaska u RoboCam Web aplikaciju, vidjet ćete sve što fotoaparat telefona 1 vidi. Priložite Telefon 1 svom robotu, tako da je njegova kamera usmjerena naprijed. Web aplikacija na telefonu 2 može imati od 1 do 4 upravljačke palice za upravljanje robotom ovisno o postavkama. Kada dodirnete navigacijsku tipku, koordinate dodirnih točaka prenose se u aplikaciju RoboCam na telefonu 1, a zatim se, ovisno o postavkama navigacijske tipke, transformiraju u EV3 motorne naredbe ili šalju u EV3 poštanske sandučiće. Ako su koordinate poslane poštanskim sandučićima, potrebno je napisati dodatni EV3 program za njihovu obradu. Nazivi poštanskih sandučića su sljedeći: x i y - joystick 1, w i z - joystick 2, a i b - joystick 3, c i d - joystick 4.
Prema zadanim postavkama aplikacija ima postavku samo za jednog robota - "EV3 Researcher", koji možete vidjeti na videozapisu.Možete sastaviti EV3 istraživača iz obrazovnog kompleta LEGO Mindstorms EV3 (45544). : https://goo.gl/yPU4sa
Ažurirano
Sigurnost počinje razumijevanjem načina na koji razvojni programeri prikupljaju i dijele vaše podatke. Prakse privatnosti i sigurnosti podataka mogu se razlikovati ovisno o vašoj upotrebi, regiji i dobi. Te informacije pružio je razvojni programer koji ih tijekom vremena može ažurirati.

Podaci se ne dijele s trećim stranama
Saznajte više o tome kako razvojni programeri navode dijeljenje

Nema prikupljenih podataka
Saznajte više o tome kako razvojni programeri navode prikupljanje
Što je novo
Version 1.4.4
Fixed a lack of the menu for Add and Delete buttons on Android 7.
Version 1.4.3
Fixed an error while changing the screen orientation in Android 6 and later.
Version 1.4.2
Added local controls.
Version 1.3.1
Added a support for nonstandard platforms like Arduino and Raspberry Pi.
Version 1.2
1. Added a control via a keyboard (to update "Researcher EV3" settings you need to delete them first!!!).
2. Added an ability to run your EV3 program.
Fixed a lack of the menu for Add and Delete buttons on Android 7.
Version 1.4.3
Fixed an error while changing the screen orientation in Android 6 and later.
Version 1.4.2
Added local controls.
Version 1.3.1
Added a support for nonstandard platforms like Arduino and Raspberry Pi.
Version 1.2
1. Added a control via a keyboard (to update "Researcher EV3" settings you need to delete them first!!!).
2. Added an ability to run your EV3 program.