
QGroundControl
4,3star
528 կարծիք
50 հզր+
Ներբեռնումներ

Բոլորի համար
info



Հավելվածի մասին
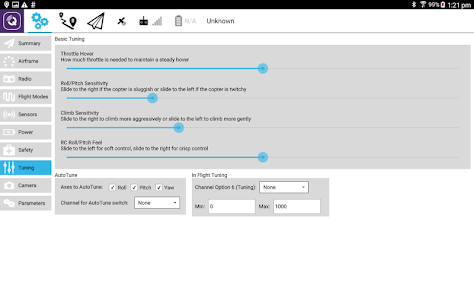
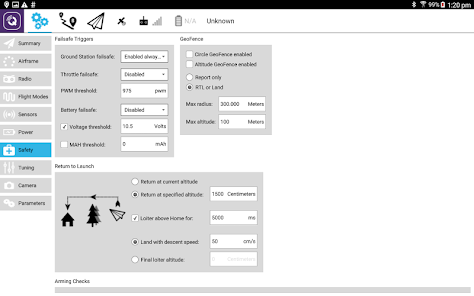
QGroundControl- ն ապահովում է ArduPilot կամ PX4 Pro շարժական տրանսպորտային միջոցների ամբողջական թռիչքի հսկողություն եւ կարգավորում: QGroundControl- ի նպատակն է բարելավվել նոր օգտագործողների համար հեշտ օգտագործման, ինչպես նաեւ փորձառու օգտվողների համար բարձր վերջնական աջակցություն:
QGroundControl- ի առանձնահատկությունները.
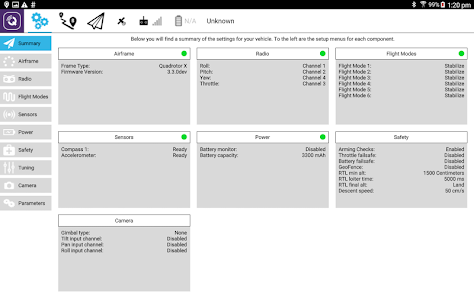
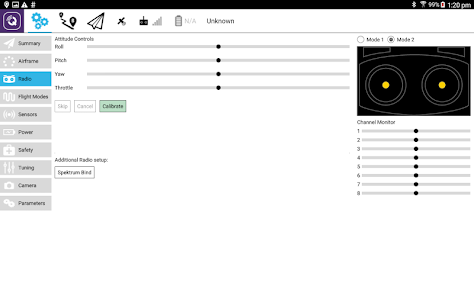
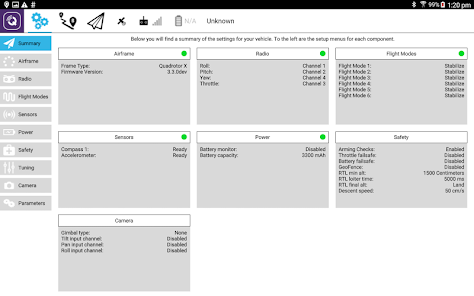
- PX4 Pro- ի եւ ArduPilot- ի (ArduCopter, ArduPlane, ArduRover, ArduSub) տեղադրվող տրանսպորտային միջոցների համար ամբողջական կոնֆիգուրացիայի աջակցություն
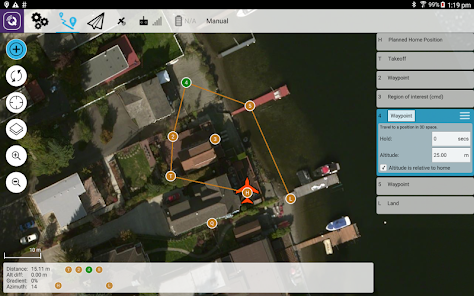
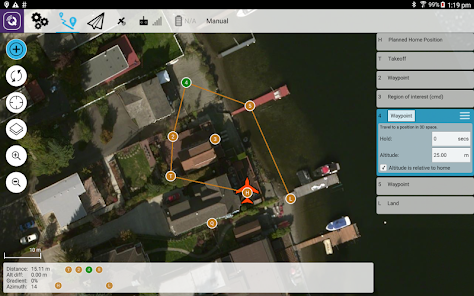
- ինքնավար թռիչքի առաքելություն
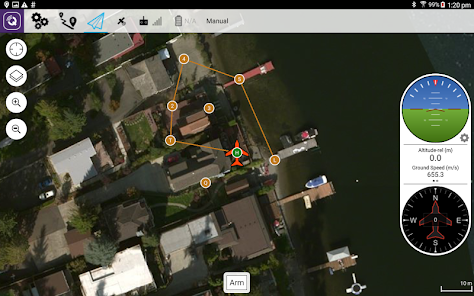
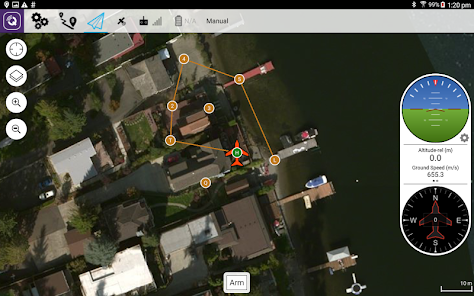
- Թռիչքի քարտեզի ցուցադրություն, որը ցույց է տալիս տրանսպորտային միջոցի դիրքը, թռիչքային ուղիները, ուղիները եւ տրանսպորտային միջոցները
- Վիդեո հոսք, գործիքի ցուցադրման կափարիչներով
- Թռիչքային աջակցություն ցանկացած MAVLink ընդունող մեքենայի համար
QGroundControl- ը հասանելի է նաեւ Windows, MacOS, Linux եւ iOS համակարգերի համար:
Հրապարակել նշումները
QGroundControl Պաշտոնական Կայք
Փաստաթղթեր
Աջակցություն
QGroundControl- ի առանձնահատկությունները.
- PX4 Pro- ի եւ ArduPilot- ի (ArduCopter, ArduPlane, ArduRover, ArduSub) տեղադրվող տրանսպորտային միջոցների համար ամբողջական կոնֆիգուրացիայի աջակցություն
- ինքնավար թռիչքի առաքելություն
- Թռիչքի քարտեզի ցուցադրություն, որը ցույց է տալիս տրանսպորտային միջոցի դիրքը, թռիչքային ուղիները, ուղիները եւ տրանսպորտային միջոցները
- Վիդեո հոսք, գործիքի ցուցադրման կափարիչներով
- Թռիչքային աջակցություն ցանկացած MAVLink ընդունող մեքենայի համար
QGroundControl- ը հասանելի է նաեւ Windows, MacOS, Linux եւ iOS համակարգերի համար:
Հրապարակել նշումները
QGroundControl Պաշտոնական Կայք
Փաստաթղթեր
Աջակցություն
Վերջին թարմացումը՝
Անվտանգությունը որոշվում է նրանով, թե ինչպես են մշակողները հավաքում և փոխանցում ձեր տվյալները։ Տվյալների գաղտնիության և անվտանգության ապահովումը կախված է հավելվածի օգտագործումից, օգտատիրոջ տարիքից և բնակության երկրից։ Այս տեղեկությունները տրամադրվել են մշակողի կողմից և ժամանակի ընթացքում կարող են թարմացվել։

Երրորդ կողմերին տվյալներ չեն փոխանցվում
Իմացեք ավելին, թե ինչպես են մշակողները հայտարարում տվյալների փոխանցման մասին

Հավելվածը տվյալներ չի հավաքում
Իմացեք ավելին, թե ինչպես են մշակողները հայտարարում տվյալների հավաքման մասին
Գնահատականներ և կարծիքներ
4,3
464 կարծիք