

RoboCam
Ietver reklāmas

4,0star
142 atsauksmes
10 tūkst.+
Lejupielādes

Visiem
info



Par šo lietotni
Izmantojot RoboCam, varat FPV kontrolēt savu LEGO Mindstorms EV3, Android vai Raspberry Pi robotu.
Īsā lietošanas pamācība (tikai tiem, kam ir LEGO Mindstorms EV3 (45544) izglītības komplekts):
1. Samontējiet pētnieku EV3 (instrukcija: https://goo.gl/yPU4sa), ieslēdziet to un pārliecinieties, vai Bluetooth darbojas.
2. Instalējiet RoboCam lietotni viedtālrunī (tālāk tekstā Tālr. 1).
3. Ieslēdziet tālruņa 1 tālruni Bluetooth un pārliecinieties, vai tālrunis 1 un EV3 ir savienoti, izmantojot Bluetooth (tiem jābūt savienotiem pārī).
4. Pievienojiet tālruni 1 un viedtālruni, ko izmantosiet, lai vadītu robotu (turpmāk - 2. tālrunis) uz to pašu Wi-Fi maršrutētāju.
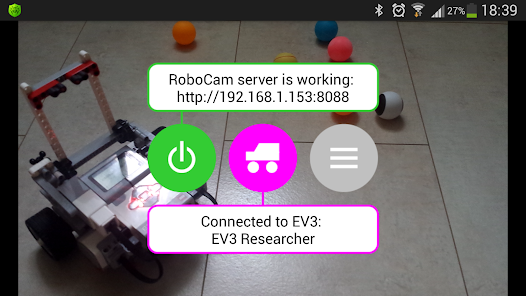
5. Startējiet RoboCam serveri. Lai to izdarītu, nospiediet kreiso zaļo pogu.
6. Pievienojiet tālruni 1 robotam. Lai to izdarītu, spiediet fuksīna pogu vidū.
7. Atveriet Google Chrome tālrunī 2 un dodieties uz saiti, kas parādīta RoboCam lietotnē pa tālruni 1.
8. Piesakieties 2. tālrunī (pēc noklusējuma izmantojiet admin un 123).
9. Uz tālruni 2 parādās divi vadības pults un video no tālruņa 1. kameras. Bloķējiet tālruni un pievienojiet to robotam.
10. Tagad jūs varat vadīt savu robotu pa tālruni 2.
Ja jums ir mājas komplekts LEGO Mindstorms EV3 (31313) vai vēlaties kontrolēt citu EV3 robotu, nevis pētnieks EV3, jums ir nepieciešams iestatīt RoboCam lietotni. Skatiet RoboCam iestatījumus.
Lai izmantotu lietojumprogrammu, jums jāzina divas lietas: kā izveidot savienojumu un kā notiek kontrole.
Tā ir ātra rokasgrāmata par standarta savienojuma iestatīšanu. Vajadzība: EV3 robots, Android viedtālrunis ar instalēto RoboCam (turpmāk tekstā Tālrunis 1) un viedtālrunis vai planšetdators (Android, iOS vai Windows) ar mūsdienīgu pārlūkprogrammu, kas atbalsta HTML5 (turpmāk tekstā Tālrunis 2). Tālrunis 1 ir savienots ar EV3 ar Bluetooth (ierīcēm jābūt iepriekš savienotām!). Pēc RoboCam servera ieslēgšanas 1. tālrunī un savienojot tālruni 1 un tālruni 2 ar to pašu WiFi maršrutētāju, varat izveidot savienojumu ar RoboCam serveri (uz tālruni 1), izmantojot pārlūkprogrammu (no 2. tālruņa). Lai to izdarītu, adrese jāievada pārlūkprogrammas adreses laukā, kas tiks rādīts, piemēram, RoboCam, http://192.168.1.2:8088
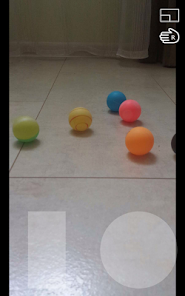
Tas ir īss apraksts par to, kā notiek kontrole. Pēc savienojuma ar RoboCam serveri, izmantojot 2. tālruņa pārlūku un ievadot RoboCam tīmekļa lietojumprogrammu, jūs redzēsiet visu, ko redz 1. tālruņa kamera. Pievienojiet tālruni 1 savam robotam, lai tā kamera tiktu virzīta uz priekšu. Tīmekļa lietotne 2. tālrunī var būt no 1 līdz 4 kursorsvirām, lai vadītu robotu atkarībā no iestatījumiem. Pieskaroties kursorsvirai, skārienpunktu koordinātas tiek pārsūtītas uz programmu RoboCam 1. tālrunī un pēc tam, atkarībā no kursorsviras iestatījumiem, tās tiek pārveidotas par EV3 motora komandām vai nosūtītas uz EV3 pastkastēm. Ja koordinātas tiek nosūtītas uz pastkastēm, jums ir nepieciešams rakstīt papildu EV3 programmu to apstrādei. Pastkastu nosaukumi ir šādi: x un y - kursorsvira 1, w un z - kursorsvira 2, a un b - kursorsvira 3, c un d - kursorsvira 4.
Pēc noklusējuma lietojumprogrammai ir iestatījums tikai vienam no robotiem - "EV3 pētnieks", ko var redzēt videoklipā. Jūs varat samontēt EV3 pētnieku no LEGO Mindstorms EV3 izglītības paketes (45544). : https://goo.gl/yPU4sa
Īsā lietošanas pamācība (tikai tiem, kam ir LEGO Mindstorms EV3 (45544) izglītības komplekts):
1. Samontējiet pētnieku EV3 (instrukcija: https://goo.gl/yPU4sa), ieslēdziet to un pārliecinieties, vai Bluetooth darbojas.
2. Instalējiet RoboCam lietotni viedtālrunī (tālāk tekstā Tālr. 1).
3. Ieslēdziet tālruņa 1 tālruni Bluetooth un pārliecinieties, vai tālrunis 1 un EV3 ir savienoti, izmantojot Bluetooth (tiem jābūt savienotiem pārī).
4. Pievienojiet tālruni 1 un viedtālruni, ko izmantosiet, lai vadītu robotu (turpmāk - 2. tālrunis) uz to pašu Wi-Fi maršrutētāju.
5. Startējiet RoboCam serveri. Lai to izdarītu, nospiediet kreiso zaļo pogu.
6. Pievienojiet tālruni 1 robotam. Lai to izdarītu, spiediet fuksīna pogu vidū.
7. Atveriet Google Chrome tālrunī 2 un dodieties uz saiti, kas parādīta RoboCam lietotnē pa tālruni 1.
8. Piesakieties 2. tālrunī (pēc noklusējuma izmantojiet admin un 123).
9. Uz tālruni 2 parādās divi vadības pults un video no tālruņa 1. kameras. Bloķējiet tālruni un pievienojiet to robotam.
10. Tagad jūs varat vadīt savu robotu pa tālruni 2.
Ja jums ir mājas komplekts LEGO Mindstorms EV3 (31313) vai vēlaties kontrolēt citu EV3 robotu, nevis pētnieks EV3, jums ir nepieciešams iestatīt RoboCam lietotni. Skatiet RoboCam iestatījumus.
Lai izmantotu lietojumprogrammu, jums jāzina divas lietas: kā izveidot savienojumu un kā notiek kontrole.
Tā ir ātra rokasgrāmata par standarta savienojuma iestatīšanu. Vajadzība: EV3 robots, Android viedtālrunis ar instalēto RoboCam (turpmāk tekstā Tālrunis 1) un viedtālrunis vai planšetdators (Android, iOS vai Windows) ar mūsdienīgu pārlūkprogrammu, kas atbalsta HTML5 (turpmāk tekstā Tālrunis 2). Tālrunis 1 ir savienots ar EV3 ar Bluetooth (ierīcēm jābūt iepriekš savienotām!). Pēc RoboCam servera ieslēgšanas 1. tālrunī un savienojot tālruni 1 un tālruni 2 ar to pašu WiFi maršrutētāju, varat izveidot savienojumu ar RoboCam serveri (uz tālruni 1), izmantojot pārlūkprogrammu (no 2. tālruņa). Lai to izdarītu, adrese jāievada pārlūkprogrammas adreses laukā, kas tiks rādīts, piemēram, RoboCam, http://192.168.1.2:8088
Tas ir īss apraksts par to, kā notiek kontrole. Pēc savienojuma ar RoboCam serveri, izmantojot 2. tālruņa pārlūku un ievadot RoboCam tīmekļa lietojumprogrammu, jūs redzēsiet visu, ko redz 1. tālruņa kamera. Pievienojiet tālruni 1 savam robotam, lai tā kamera tiktu virzīta uz priekšu. Tīmekļa lietotne 2. tālrunī var būt no 1 līdz 4 kursorsvirām, lai vadītu robotu atkarībā no iestatījumiem. Pieskaroties kursorsvirai, skārienpunktu koordinātas tiek pārsūtītas uz programmu RoboCam 1. tālrunī un pēc tam, atkarībā no kursorsviras iestatījumiem, tās tiek pārveidotas par EV3 motora komandām vai nosūtītas uz EV3 pastkastēm. Ja koordinātas tiek nosūtītas uz pastkastēm, jums ir nepieciešams rakstīt papildu EV3 programmu to apstrādei. Pastkastu nosaukumi ir šādi: x un y - kursorsvira 1, w un z - kursorsvira 2, a un b - kursorsvira 3, c un d - kursorsvira 4.
Pēc noklusējuma lietojumprogrammai ir iestatījums tikai vienam no robotiem - "EV3 pētnieks", ko var redzēt videoklipā. Jūs varat samontēt EV3 pētnieku no LEGO Mindstorms EV3 izglītības paketes (45544). : https://goo.gl/yPU4sa
Atjaunināta
Drošība sākas ar izpratni par to, kā izstrādātāji vāc un kopīgo jūsu datus. Datu konfidencialitātes un drošības prakse var atšķirties atkarībā no izmantojuma, reģiona un vecuma. Izstrādātājs ir sniedzis šo informāciju un laika gaitā var to atjaunināt.

Dati netiek kopīgoti ar trešajām pusēm
Uzziniet vairāk par to, kā izstrādātāji norāda datu kopīgošanu.

Dati netiek vākti
Uzziniet vairāk par to, kā izstrādātāji norāda datu vākšanu.
Jaunumi
Version 1.4.4
Fixed a lack of the menu for Add and Delete buttons on Android 7.
Version 1.4.3
Fixed an error while changing the screen orientation in Android 6 and later.
Version 1.4.2
Added local controls.
Version 1.3.1
Added a support for nonstandard platforms like Arduino and Raspberry Pi.
Version 1.2
1. Added a control via a keyboard (to update "Researcher EV3" settings you need to delete them first!!!).
2. Added an ability to run your EV3 program.
Fixed a lack of the menu for Add and Delete buttons on Android 7.
Version 1.4.3
Fixed an error while changing the screen orientation in Android 6 and later.
Version 1.4.2
Added local controls.
Version 1.3.1
Added a support for nonstandard platforms like Arduino and Raspberry Pi.
Version 1.2
1. Added a control via a keyboard (to update "Researcher EV3" settings you need to delete them first!!!).
2. Added an ability to run your EV3 program.