

RoboCam
Mengandungi iklan

4.0star
142 ulasan
10K+
Muat turun

Semua orang
info



Perihal apl ini
Menggunakan RoboCam anda boleh mengendalikan FPV LEGO Mindstorms anda sendiri EV3, Android atau Raspberry Pi robot.
Panduan permulaan cepat (hanya untuk mereka yang mempunyai kit pendidikan LEGO Mindstorms EV3 (45544)):
1. Memasang Penyelidik EV3 (arahan: https://goo.gl/yPU4sa), hidupkan dan pastikan Bluetooth berfungsi.
2. Pasang aplikasi RoboCam pada telefon pintar (selepas ini, Telefon 1).
3. Putarkan Bluetooth Telefon 1 dan pastikan Telefon 1 dan EV3 disambungkan melalui Bluetooth (mereka mesti dipasangkan).
4. Sambungkan Telefon 1 dan telefon pintar yang akan anda gunakan untuk mengawal robot (selepas ini, Telefon 2) ke penghala Wi-Fi yang sama.
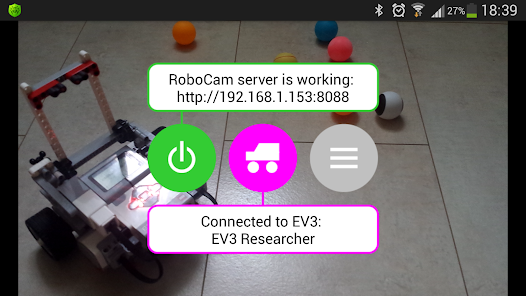
5. Mulakan pelayan RoboCam. Untuk ini tekan butang hijau kiri.
6. Sambungkan Telefon 1 ke robot. Untuk ini tekan butang magenta di tengah.
7. Buka Google Chrome pada Telefon 2 dan pergi ke pautan yang ditunjukkan dalam aplikasi RoboCam di Telefon 1.
8. Masuk ke Telefon 2 (secara lalai gunakan admin dan 123).
9. Pada Telefon 2 muncul dua joysticks dan video dari kamera Telefon 1. Kunci telefon dan pasangkannya ke robot.
10. Sekarang anda boleh mengawal robot anda melalui Telefon 2.
Jika anda mempunyai kit rumah LEGO Mindstorms EV3 (31313) atau anda mahu mengawal robot EV3 yang lain dan bukan Penyelidik EV3, anda perlu menyediakan aplikasi RoboCam. Lihat tetapan RoboCam.
Untuk menggunakan aplikasi, anda perlu mengetahui dua perkara: bagaimana untuk membuat sambungan dan bagaimana kawalan berlaku.
Itulah manual cepat pada menetapkan sambungan standard. Perlu: Robot EV3, Android-telefon pintar dengan RoboCam yang dipasang (selepas ini, Telefon 1) dan telefon pintar atau tablet (Android, iOS atau Windows) dengan pelayar moden yang menyokong HTML5 (selepas ini, Telefon 2). Telefon 1 disambungkan ke EV3 melalui Bluetooth (peranti mestilah dipasangkan!). Selepas memulakan pelayan RoboCam di Telefon 1 dan sambungkan Telefon 1 dan Telefon 2 ke router WiFi yang sama, anda boleh menyambung ke pelayan RoboCam (ke Telefon 1) melalui penyemak imbas (dari Telefon 2). Untuk melakukan ini, anda perlu menulis alamat ke dalam bidang alamat penyemak imbas yang akan ditunjukkan dalam RoboCam misalnya, http://192.168.1.2:8088
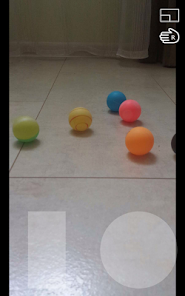
Itulah penerangan ringkas mengenai bagaimana kawalan itu berlaku. Selepas menyambung ke pelayan RoboCam melalui pelayar Telefon 2 dan memasuki aplikasi RoboCam Web, anda akan melihat semua kamera Telefon 1 dilihat. Lampirkan Telefon 1 ke robot anda, jadi kameranya diarahkan ke hadapan. Aplikasi web pada Telefon 2 boleh mempunyai 1 hingga 4 joysticks untuk mengawal robot bergantung pada tetapan. Apabila anda menyentuh kayu bedik, koordinat titik sentuhan dipindahkan ke aplikasi RoboCam pada Telefon 1 dan kemudian, bergantung pada tetapan joystick, mereka diubah kepada perintah motor EV3 atau dihantar ke peti mel EV3. Sekiranya koordinat dihantar ke peti mel, anda perlu menulis program EV3 tambahan untuk memprosesnya. Nama peti mel berikut: x dan y - joystick 1, w dan z - joystick 2, a dan b - joystick 3, c dan d - joystick 4.
Secara lalai, aplikasi ini mempunyai tetapan untuk hanya satu daripada robot - "EV3 Researcher», yang boleh anda lihat pada video. Anda boleh memasang EV3 Researcher dari kit pendidikan LEGO Mindstorms EV3 (45544). : https://goo.gl/yPU4sa
Panduan permulaan cepat (hanya untuk mereka yang mempunyai kit pendidikan LEGO Mindstorms EV3 (45544)):
1. Memasang Penyelidik EV3 (arahan: https://goo.gl/yPU4sa), hidupkan dan pastikan Bluetooth berfungsi.
2. Pasang aplikasi RoboCam pada telefon pintar (selepas ini, Telefon 1).
3. Putarkan Bluetooth Telefon 1 dan pastikan Telefon 1 dan EV3 disambungkan melalui Bluetooth (mereka mesti dipasangkan).
4. Sambungkan Telefon 1 dan telefon pintar yang akan anda gunakan untuk mengawal robot (selepas ini, Telefon 2) ke penghala Wi-Fi yang sama.
5. Mulakan pelayan RoboCam. Untuk ini tekan butang hijau kiri.
6. Sambungkan Telefon 1 ke robot. Untuk ini tekan butang magenta di tengah.
7. Buka Google Chrome pada Telefon 2 dan pergi ke pautan yang ditunjukkan dalam aplikasi RoboCam di Telefon 1.
8. Masuk ke Telefon 2 (secara lalai gunakan admin dan 123).
9. Pada Telefon 2 muncul dua joysticks dan video dari kamera Telefon 1. Kunci telefon dan pasangkannya ke robot.
10. Sekarang anda boleh mengawal robot anda melalui Telefon 2.
Jika anda mempunyai kit rumah LEGO Mindstorms EV3 (31313) atau anda mahu mengawal robot EV3 yang lain dan bukan Penyelidik EV3, anda perlu menyediakan aplikasi RoboCam. Lihat tetapan RoboCam.
Untuk menggunakan aplikasi, anda perlu mengetahui dua perkara: bagaimana untuk membuat sambungan dan bagaimana kawalan berlaku.
Itulah manual cepat pada menetapkan sambungan standard. Perlu: Robot EV3, Android-telefon pintar dengan RoboCam yang dipasang (selepas ini, Telefon 1) dan telefon pintar atau tablet (Android, iOS atau Windows) dengan pelayar moden yang menyokong HTML5 (selepas ini, Telefon 2). Telefon 1 disambungkan ke EV3 melalui Bluetooth (peranti mestilah dipasangkan!). Selepas memulakan pelayan RoboCam di Telefon 1 dan sambungkan Telefon 1 dan Telefon 2 ke router WiFi yang sama, anda boleh menyambung ke pelayan RoboCam (ke Telefon 1) melalui penyemak imbas (dari Telefon 2). Untuk melakukan ini, anda perlu menulis alamat ke dalam bidang alamat penyemak imbas yang akan ditunjukkan dalam RoboCam misalnya, http://192.168.1.2:8088
Itulah penerangan ringkas mengenai bagaimana kawalan itu berlaku. Selepas menyambung ke pelayan RoboCam melalui pelayar Telefon 2 dan memasuki aplikasi RoboCam Web, anda akan melihat semua kamera Telefon 1 dilihat. Lampirkan Telefon 1 ke robot anda, jadi kameranya diarahkan ke hadapan. Aplikasi web pada Telefon 2 boleh mempunyai 1 hingga 4 joysticks untuk mengawal robot bergantung pada tetapan. Apabila anda menyentuh kayu bedik, koordinat titik sentuhan dipindahkan ke aplikasi RoboCam pada Telefon 1 dan kemudian, bergantung pada tetapan joystick, mereka diubah kepada perintah motor EV3 atau dihantar ke peti mel EV3. Sekiranya koordinat dihantar ke peti mel, anda perlu menulis program EV3 tambahan untuk memprosesnya. Nama peti mel berikut: x dan y - joystick 1, w dan z - joystick 2, a dan b - joystick 3, c dan d - joystick 4.
Secara lalai, aplikasi ini mempunyai tetapan untuk hanya satu daripada robot - "EV3 Researcher», yang boleh anda lihat pada video. Anda boleh memasang EV3 Researcher dari kit pendidikan LEGO Mindstorms EV3 (45544). : https://goo.gl/yPU4sa
Dikemas kini pada
Keselamatan bermula dengan memahami cara pembangun mengumpul dan berkongsi data anda. Amalan privasi dan keselamatan data mungkin berbeza-beza berdasarkan penggunaan, rantau dan umur anda. Pembangun memberikan maklumat ini dan mungkin mengemas kini maklumat dari semasa ke semasa.

Tiada data dikongsi dengan pihak ketiga
Ketahui lebih lanjut tentang cara pembangun mengisytiharkan perkongsian

Tiada data dikumpulkan
Ketahui lebih lanjut tentang cara pembangun mengisytiharkan pengumpulan
Terbaharu
Version 1.4.4
Fixed a lack of the menu for Add and Delete buttons on Android 7.
Version 1.4.3
Fixed an error while changing the screen orientation in Android 6 and later.
Version 1.4.2
Added local controls.
Version 1.3.1
Added a support for nonstandard platforms like Arduino and Raspberry Pi.
Version 1.2
1. Added a control via a keyboard (to update "Researcher EV3" settings you need to delete them first!!!).
2. Added an ability to run your EV3 program.
Fixed a lack of the menu for Add and Delete buttons on Android 7.
Version 1.4.3
Fixed an error while changing the screen orientation in Android 6 and later.
Version 1.4.2
Added local controls.
Version 1.3.1
Added a support for nonstandard platforms like Arduino and Raspberry Pi.
Version 1.2
1. Added a control via a keyboard (to update "Researcher EV3" settings you need to delete them first!!!).
2. Added an ability to run your EV3 program.