
Robot Calibration by SprutCAM
100+
Baixades

Per a tots els públics
info








Sobre l'aplicació
Treball de calibració del robot amb MachineMaker 2.0
L'aplicació per transferir automàticament dades sobre la posició de les eines a MachineMaker 2.0.
La calibració del robot admet el calibratge TCP per als següents tipus de robots:
- Fanuc
- Kuka
- Tormach
- Borunte
- CRP
- Denso
- Dobot
-Estun
- Hola
- Hyundai
- Motoman
- Newker
- Manutec
- Nachi
- OTC Daihen
- Torí
Com funciona:
- Escaneja el codi QR a MachineMacker 2.0 per enllaçar l'aplicació amb el projecte;
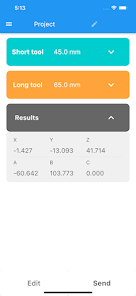
- Recolliu les dades TCP del robot. Primer amb una eina curta, després amb una llarga;
- Introduïu la lectura XYZ. Introduïu la longitud del voladís de les eines de l'eix en mil·límetres
Feu clic a "Calcular"
L'aplicació per transferir automàticament dades sobre la posició de les eines a MachineMaker 2.0.
La calibració del robot admet el calibratge TCP per als següents tipus de robots:
- Fanuc
- Kuka
- Tormach
- Borunte
- CRP
- Denso
- Dobot
-Estun
- Hola
- Hyundai
- Motoman
- Newker
- Manutec
- Nachi
- OTC Daihen
- Torí
Com funciona:
- Escaneja el codi QR a MachineMacker 2.0 per enllaçar l'aplicació amb el projecte;
- Recolliu les dades TCP del robot. Primer amb una eina curta, després amb una llarga;
- Introduïu la lectura XYZ. Introduïu la longitud del voladís de les eines de l'eix en mil·límetres
Feu clic a "Calcular"
Data d'actualització:
La seguretat comença per entendre com els desenvolupadors recullen i comparteixen les teves dades. Les pràctiques de privadesa i seguretat de les dades poden variar segons l'ús que es fa de l'aplicació, la regió i l'edat. El desenvolupador ha proporcionat aquesta informació i és possible que l'actualitzi al llarg del temps.

No es comparteixen dades amb tercers
Més informació sobre com els desenvolupadors declaren la compartició de dades

No es recullen dades
Més informació sobre com els desenvolupadors declaren la recollida de dades
Assistència de l'aplicació
Sobre el desenvolupador
SPRUTCAM TECH LIMITED
hazrat@sprutcam.io
9 Aiolou & Panagioti Diomidous
Limassol 3020
Cyprus
+357 97 620294