
Robot Calibration by SprutCAM
100+
Downloads

Jedes Alter
info








Über diese App
Roboterkalibrierung funktioniert mit MachineMaker 2.0
Die App zur automatischen Übertragung von Daten über die Werkzeugposition an MachineMaker 2.0.
Die Roboterkalibrierung unterstützt die TCP-Kalibrierung für die folgenden Robotertypen:
- Fanuc
- Kuka
- Tormach
- Borunte
- CRP
- Denso
- Dobot
- Estun
- Hiwin
- Hyundai
- Motoman
- Newker
- Manutec
- Nachi
- OTC Daihen
- Turin
Wie es funktioniert:
- Scannen Sie den QR-Code in MachineMacker 2.0, um die App mit dem Projekt zu verknüpfen.
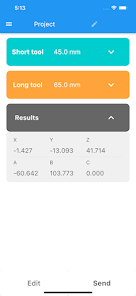
- Sammeln Sie die TCP-Daten des Roboters. Zuerst mit einem kurzen Werkzeug, dann mit einem langen;
- Geben Sie den XYZ-Wert ein. Geben Sie die Länge des Überhangs der Werkzeuge von der Spindel in Millimetern ein
Klicken Sie auf „Berechnen“
Die App zur automatischen Übertragung von Daten über die Werkzeugposition an MachineMaker 2.0.
Die Roboterkalibrierung unterstützt die TCP-Kalibrierung für die folgenden Robotertypen:
- Fanuc
- Kuka
- Tormach
- Borunte
- CRP
- Denso
- Dobot
- Estun
- Hiwin
- Hyundai
- Motoman
- Newker
- Manutec
- Nachi
- OTC Daihen
- Turin
Wie es funktioniert:
- Scannen Sie den QR-Code in MachineMacker 2.0, um die App mit dem Projekt zu verknüpfen.
- Sammeln Sie die TCP-Daten des Roboters. Zuerst mit einem kurzen Werkzeug, dann mit einem langen;
- Geben Sie den XYZ-Wert ein. Geben Sie die Länge des Überhangs der Werkzeuge von der Spindel in Millimetern ein
Klicken Sie auf „Berechnen“
Aktualisiert am
Was die Sicherheit angeht, solltest du als Erstes verstehen, wie Entwickler deine Daten erheben und weitergeben. Die Datenschutz- und Sicherheitspraktiken können je nach deiner Verwendung, deiner Region und deinem Alter variieren. Diese Informationen wurden vom Entwickler zur Verfügung gestellt und können jederzeit von ihm geändert werden.

Keine Daten werden mit Drittunternehmen oder -organisationen geteilt

Keine Daten erhoben
Support für diese App
Informationen zum Entwickler
SPRUTCAM TECH LIMITED
hazrat@sprutcam.io
9 Aiolou & Panagioti Diomidous
Limassol 3020
Cyprus
+357 97 620294