
AndrDron
500+
Descargas

Apto para todo público
info

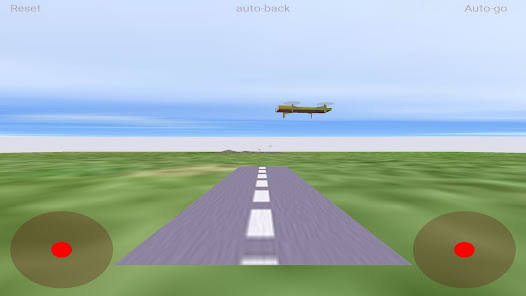
Acerca de este juego
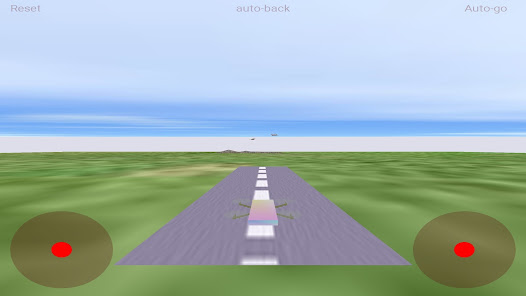
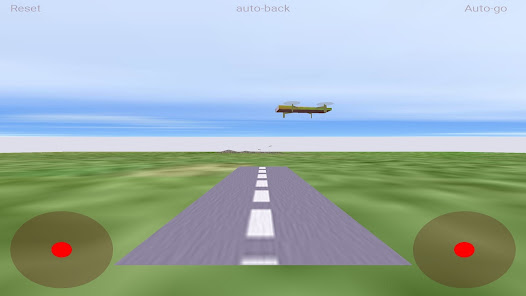
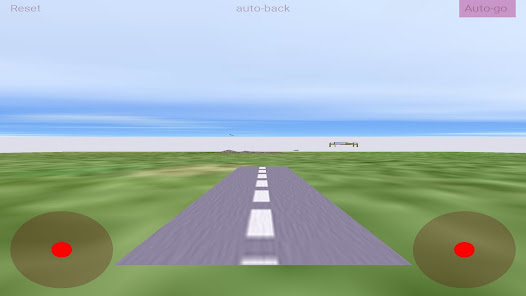
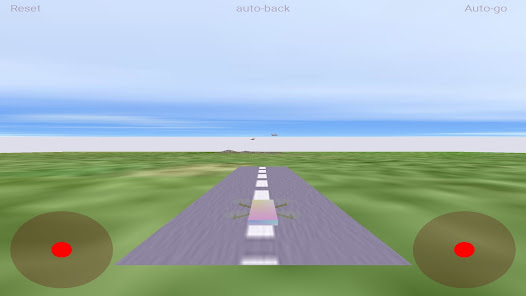
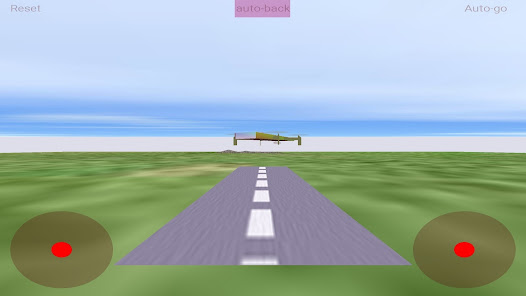
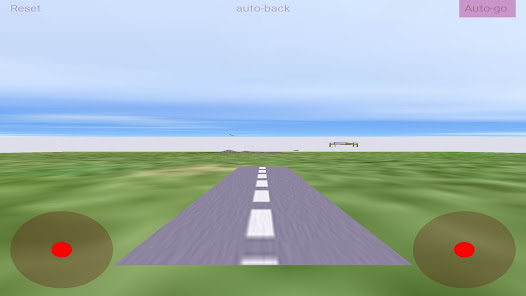
Puedes manejar el dron en velocidad, altura y rotación.
Retroceso automático para volver a la posición inicial.
Auto-go para volar automáticamente.
Programa:
Constantes: pi y cualquier número int/flotante
Variables: u v
Operadores: + - * / > < == & |
Funciones: if(exp,exp1,exp2)
sin() cos() tan() asin() acos() atan()
sinh() cosh() tanh() log() ln() rand()
exp() abs() sqrt() pow(base,exponente)
Las instrucciones para programar
// Para comentarios
speed= La velocidad horizontal.
speedh= La velocidad vertical.
ang= El ángulo horizontal.
wait= El intervalo de espera.
restablecer La acción de restablecer.
autog La acción de ir automáticamente.
autob La acción de retroceso automático.
Para acciones repetitivas usa do - enddo. Ver ejemplo 5.
Retroceso automático para volver a la posición inicial.
Auto-go para volar automáticamente.
Programa:
Constantes: pi y cualquier número int/flotante
Variables: u v
Operadores: + - * / > < == & |
Funciones: if(exp,exp1,exp2)
sin() cos() tan() asin() acos() atan()
sinh() cosh() tanh() log() ln() rand()
exp() abs() sqrt() pow(base,exponente)
Las instrucciones para programar
// Para comentarios
speed= La velocidad horizontal.
speedh= La velocidad vertical.
ang= El ángulo horizontal.
wait= El intervalo de espera.
restablecer La acción de restablecer.
autog La acción de ir automáticamente.
autob La acción de retroceso automático.
Para acciones repetitivas usa do - enddo. Ver ejemplo 5.
Actualización
El primer paso de la seguridad es comprender cómo los desarrolladores recopilan y comparten tus datos. Las prácticas de privacidad y seguridad de datos pueden variar en función del uso de la app, la región y la edad. El desarrollador proporcionó esta información y podría actualizarla con el tiempo.

No se comparten datos con terceros
Más información sobre cómo los desarrolladores declaran el uso compartido

No se recopilan datos
Más información sobre cómo los desarrolladores declaran la recopilación
Novedades
2.2 Android U
1.8 Use of random function
1.7 Error detector
1.6 Drone coordinates
1.5 More Samples
1.4 Program
1.3 Android S
1.8 Use of random function
1.7 Error detector
1.6 Drone coordinates
1.5 More Samples
1.4 Program
1.3 Android S
Asistencia de la app
Acerca del desarrollador
Leopoldo Rodriguez Cabañas
leorodwm@gmail.com
Spain
undefined





