
AndrDron
500+
Lataukset

Kaikki
info

Tietoa pelistä
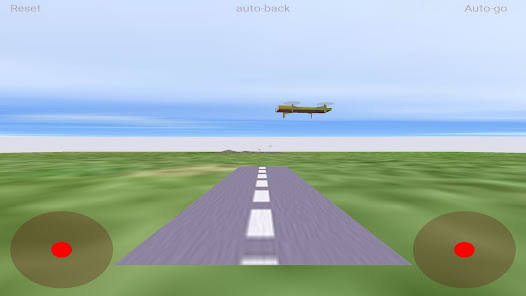
Voit käsitellä dronea nopeuden, korkeuden ja pyörimisen suhteen.
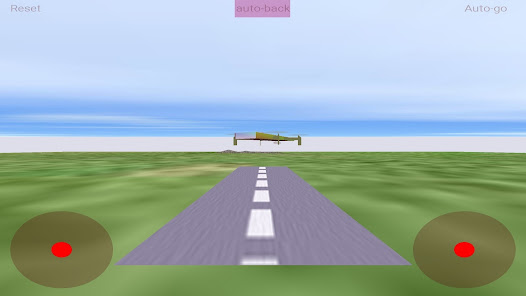
Automaattinen paluu palataksesi alkuasentoon.
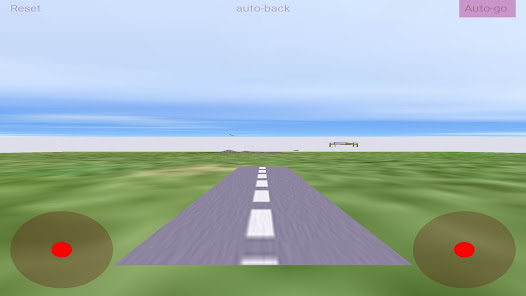
Auto-go lentää automaattisesti.
Ohjelmoida:
Vakiot: pi ja mikä tahansa int/kelluva luku
Muuttujat: u v
Operaattorit: + - * / > < == & |
Funktiot: if(exp,exp1,exp2)
sin() cos() tan() asin() acos() atan()
sinh() cosh() tanh() log() ln() rand()
exp() abs() sqrt() pow(kanta, eksponentti)
Ohjeet ohjelmointiin
// Kommentteja varten
nopeus = vaakasuuntainen nopeus.
speedh = Pystynopeus.
ang = vaakasuuntainen kulma.
odota = odotusaika.
reset Nollaustoiminto.
autog Auto-go-toiminto.
autob Automaattinen paluutoiminto.
Käytä toistuviin toimiin do - enddo. Katso esimerkki 5.
Automaattinen paluu palataksesi alkuasentoon.
Auto-go lentää automaattisesti.
Ohjelmoida:
Vakiot: pi ja mikä tahansa int/kelluva luku
Muuttujat: u v
Operaattorit: + - * / > < == & |
Funktiot: if(exp,exp1,exp2)
sin() cos() tan() asin() acos() atan()
sinh() cosh() tanh() log() ln() rand()
exp() abs() sqrt() pow(kanta, eksponentti)
Ohjeet ohjelmointiin
// Kommentteja varten
nopeus = vaakasuuntainen nopeus.
speedh = Pystynopeus.
ang = vaakasuuntainen kulma.
odota = odotusaika.
reset Nollaustoiminto.
autog Auto-go-toiminto.
autob Automaattinen paluutoiminto.
Käytä toistuviin toimiin do - enddo. Katso esimerkki 5.
Päivitetty
Turvallisuus alkaa siitä, että ymmärrät, miten kehittäjät keräävät ja jakavat dataasi. Datan yksityisyys- ja tietoturvatoimet saattavat vaihdella käytön, alueen ja iän mukaan. Kehittäjä on antanut nämä tiedot ja saattaa päivittää niitä myöhemmin.


Uutta
2.2 Android U
1.8 Use of random function
1.7 Error detector
1.6 Drone coordinates
1.5 More Samples
1.4 Program
1.3 Android S
1.8 Use of random function
1.7 Error detector
1.6 Drone coordinates
1.5 More Samples
1.4 Program
1.3 Android S
Sovelluksen tuki
Tietoa kehittäjästä
Leopoldo Rodriguez Cabañas
leorodwm@gmail.com
Spain
undefined





