
Electrical Drives
Sisältää mainoksia

Kaikki
info
10 t.+
latausta

Kaikki
Lue lisää



Tietoa sovelluksesta
►Sähkömoottorit ovat olennainen osa teollisuus- ja automaatioprosesseja, erityisesti silloin, kun moottorin nopeuden tarkka hallinta on ensisijainen vaatimus. Lisäksi kaikki nykyaikaiset sähköjunat tai veturijärjestelmät ovat sähkökäyttöisiä. Robotics on toinen tärkeä alue, jossa säädettävät nopeusasemat tarjoavat tarkan nopeuden ja paikan säätöä
►A käyttö toimii ja ohjaa liikkuvien kohteiden nopeutta, vääntöä ja suuntaa. Asemia käytetään yleensä nopeus- tai liikkeentunnistussovelluksiin, kuten työstökoneisiin, kuljetuksiin, robottiin, puhaltimiin jne. Sähkömoottoreiden ohjaukseen käytetään sähköisiä taajuusmuuttajia.
►Aurit voivat olla vakio- tai muuttuvina. Vakionopeusasemat ovat tehottomia vaihdettavia nopeuksia varten; tällaisissa tapauksissa taajuusmuuttajia käytetään kuormien käyttämiseen millä tahansa laajalla nopeusalueella
►Säädettävät nopeusasemat ovat tarpeen erilaisten kuormien nopeuden, asennon tai vääntömomentin tarkan ja jatkuvan hallinnan kannalta. Yhdessä tämän tärkeän toiminnon kanssa on monia syitä käyttää säädettäviä nopeusasemia. Osa näistä sisältää myös
➻ Tehokkuuden saavuttaminen: Sähkökäyttöiset taajuusmuuttajat voivat käyttää laajaa virtalähdettä milliwattista megawattiin eri nopeuksilla ja siten järjestelmän kokonaiskustannukset pienenevät
➻ Moottorin toiminnan lopettamisen tai kääntämisen tarkkuuden lisääminen
➻ Käynnistysvirran säätö
➻ Suojaa
➻ Kehittää kehittynyt ohjaus parametrien vaihtelulla, kuten lämpötila, paine, taso jne.
【Aiheet, joita tässä sovelluksessa on lueteltu alla】
⇢ DC-moottori tai tasavirtamoottori
⇢ Kolmivaiheisen induktiokoneen työskentelyperiaate
⇢ Synkronisen moottorin työskentelyperiaate
⇢ Sähkömoottorin tehoarvot
⇢ Moottoriöljyluokka ja sen luokitus
⇢ Induktiokoneen jarrutus regeneratiiviseen kytkentään Induktiomoottorin dynaaminen jarrutus
⇢ Induktiomoottorit Induktiomoottorin jarrutusnopeuden säätö
⇢ DC-moottoriasemat
⇢ Sähkömoottoreiden dynamiikka
⇢ Stepper-moottorin kytkentä
⇢ Sähkömoottoreiden ohjaus
⇢ Synkroniset moottoriasemat
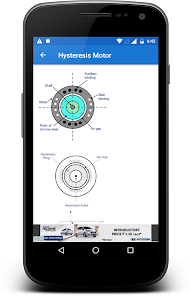
⇢ Hystereesi-moottori
⇢ Stepper Motor Drive
⇢ Bipolar Stepper Motor
⇢ Mikä on jarrutus? Jarrutyypit Regeneratiiviset kytkennät dynaamisella jarrutuksella
⇢ DC-moottorin jarrutusmuodot
⇢ Mikä on servomoottori?
⇢ Servomekanismi Servo-moottorin teoria ja työskentelyperiaate
⇢ Servo-moottorin ohjaus
⇢ DC-servomoottorit DC-servomoottorin teoria
⇢ Servomoottoriohjain tai servomoottoriohjain
⇢ Robotics-aurinkokennojärjestelmien servomoottorit, jne
⇢ Muuttuva taajuusmuuttaja tai VFD
⇢ Sähkömoottorit
⇢ Magneettiset piirit
⇢ Ilma-aukko
⇢ Momenttituotanto
⇢ Erityiskuormat ja ominaisteho
⇢ Energian muuntaminen - Motional Emf
⇢ Vastaava virtapiiri
⇢ Sähkömoottoreiden yleiset ominaisuudet
⇢ Moottoreiden virtamuuntajat
⇢ Jännitehallinta - D.C.-lähtö D.C. -teholta
⇢ Induktiivinen kuorma - ylijännitesuojaus
⇢ D.C. A.C. - Kontrolloitu korjaus
⇢ Kolmivaiheinen täysin säädettävä muunnin
⇢ A.C D.C. SP - SP Inversion
⇢ Sinimuotoinen PWM
⇢ Taajuusmuuttajan vaihtovälineet
⇢ virtakytkinten jäähdytys
⇢ tavanomaiset D.C. -moottorit
⇢ Väliaikainen käyttäytyminen - Current Surges
⇢ Shunt-, sarja- ja yhdistelmämoottorit
⇢ Shunt-moottori - vakaan tilan toimintaominaisuudet
⇢ nelikulmaisen toiminnan ja regeneratiivisen jarrutuksen
⇢ Täysinopeuksinen regeneroiva kääntö
⇢ Toy Motors
⇢ D.C. Moottorikäytöt
⇢ Epätarkka virta
⇢ Yksimoottoriset kääntöasemat
⇢ Ohjausjärjestelyt D.C-asemille
⇢ Chopper-Fed D.C. -moottorit
⇢ D.C. servomoottorit
⇢ Real Transformer
⇢ Invertterijäähdytteiset induktiomoottorit
►A käyttö toimii ja ohjaa liikkuvien kohteiden nopeutta, vääntöä ja suuntaa. Asemia käytetään yleensä nopeus- tai liikkeentunnistussovelluksiin, kuten työstökoneisiin, kuljetuksiin, robottiin, puhaltimiin jne. Sähkömoottoreiden ohjaukseen käytetään sähköisiä taajuusmuuttajia.
►Aurit voivat olla vakio- tai muuttuvina. Vakionopeusasemat ovat tehottomia vaihdettavia nopeuksia varten; tällaisissa tapauksissa taajuusmuuttajia käytetään kuormien käyttämiseen millä tahansa laajalla nopeusalueella
►Säädettävät nopeusasemat ovat tarpeen erilaisten kuormien nopeuden, asennon tai vääntömomentin tarkan ja jatkuvan hallinnan kannalta. Yhdessä tämän tärkeän toiminnon kanssa on monia syitä käyttää säädettäviä nopeusasemia. Osa näistä sisältää myös
➻ Tehokkuuden saavuttaminen: Sähkökäyttöiset taajuusmuuttajat voivat käyttää laajaa virtalähdettä milliwattista megawattiin eri nopeuksilla ja siten järjestelmän kokonaiskustannukset pienenevät
➻ Moottorin toiminnan lopettamisen tai kääntämisen tarkkuuden lisääminen
➻ Käynnistysvirran säätö
➻ Suojaa
➻ Kehittää kehittynyt ohjaus parametrien vaihtelulla, kuten lämpötila, paine, taso jne.
【Aiheet, joita tässä sovelluksessa on lueteltu alla】
⇢ DC-moottori tai tasavirtamoottori
⇢ Kolmivaiheisen induktiokoneen työskentelyperiaate
⇢ Synkronisen moottorin työskentelyperiaate
⇢ Sähkömoottorin tehoarvot
⇢ Moottoriöljyluokka ja sen luokitus
⇢ Induktiokoneen jarrutus regeneratiiviseen kytkentään Induktiomoottorin dynaaminen jarrutus
⇢ Induktiomoottorit Induktiomoottorin jarrutusnopeuden säätö
⇢ DC-moottoriasemat
⇢ Sähkömoottoreiden dynamiikka
⇢ Stepper-moottorin kytkentä
⇢ Sähkömoottoreiden ohjaus
⇢ Synkroniset moottoriasemat
⇢ Hystereesi-moottori
⇢ Stepper Motor Drive
⇢ Bipolar Stepper Motor
⇢ Mikä on jarrutus? Jarrutyypit Regeneratiiviset kytkennät dynaamisella jarrutuksella
⇢ DC-moottorin jarrutusmuodot
⇢ Mikä on servomoottori?
⇢ Servomekanismi Servo-moottorin teoria ja työskentelyperiaate
⇢ Servo-moottorin ohjaus
⇢ DC-servomoottorit DC-servomoottorin teoria
⇢ Servomoottoriohjain tai servomoottoriohjain
⇢ Robotics-aurinkokennojärjestelmien servomoottorit, jne
⇢ Muuttuva taajuusmuuttaja tai VFD
⇢ Sähkömoottorit
⇢ Magneettiset piirit
⇢ Ilma-aukko
⇢ Momenttituotanto
⇢ Erityiskuormat ja ominaisteho
⇢ Energian muuntaminen - Motional Emf
⇢ Vastaava virtapiiri
⇢ Sähkömoottoreiden yleiset ominaisuudet
⇢ Moottoreiden virtamuuntajat
⇢ Jännitehallinta - D.C.-lähtö D.C. -teholta
⇢ Induktiivinen kuorma - ylijännitesuojaus
⇢ D.C. A.C. - Kontrolloitu korjaus
⇢ Kolmivaiheinen täysin säädettävä muunnin
⇢ A.C D.C. SP - SP Inversion
⇢ Sinimuotoinen PWM
⇢ Taajuusmuuttajan vaihtovälineet
⇢ virtakytkinten jäähdytys
⇢ tavanomaiset D.C. -moottorit
⇢ Väliaikainen käyttäytyminen - Current Surges
⇢ Shunt-, sarja- ja yhdistelmämoottorit
⇢ Shunt-moottori - vakaan tilan toimintaominaisuudet
⇢ nelikulmaisen toiminnan ja regeneratiivisen jarrutuksen
⇢ Täysinopeuksinen regeneroiva kääntö
⇢ Toy Motors
⇢ D.C. Moottorikäytöt
⇢ Epätarkka virta
⇢ Yksimoottoriset kääntöasemat
⇢ Ohjausjärjestelyt D.C-asemille
⇢ Chopper-Fed D.C. -moottorit
⇢ D.C. servomoottorit
⇢ Real Transformer
⇢ Invertterijäähdytteiset induktiomoottorit
Päivitetty
Turvallisuus alkaa siitä, että ymmärrät, miten kehittäjät keräävät ja jakavat dataasi. Datan yksityisyys- ja turvallisuuskäytännöt saattavat vaihdella käytön, alueen ja iän mukaan. Kehittäjä on antanut nämä tiedot ja saattaa päivittää niitä myöhemmin.

Sovellus voi jakaa näitä datatyyppejä kolmansille osapuolille
Laite- tai muut tunnisteet

Dataa ei ole kerätty
Lue, miten kehittäjät ilmoittavat keräämisestä

Data salataan siirron ajaksi

Dataa ei voi poistaa
Uutta
- More Topics Added
Kaikki
Lue lisääSovelluksen tuki
Tietoa kehittäjästä
Prabhu Thankaraju
vishwasparrow@gmail.com
101-B,Nishadham Bldg,1/5
Chipale,Panvel
NAVI MUMBAI, Maharashtra 410206
India








