
Robot Calibration by SprutCAM
100+
Descargas

Todos
info








Acerca desta aplicación
Traballo de calibración do robot con MachineMaker 2.0
A aplicación para transferir automaticamente datos sobre a posición das ferramentas a MachineMaker 2.0.
A calibración do robot admite a calibración TCP para os seguintes tipos de robots:
- Fanuc
- Kuka
- Tormach
- Borunte
- CRP
- Denso
- Dobot
-Estun
- Ola
- Hyundai
- Motoman
- Newker
- Manutec
- Nachi
- OTC Daihen
- Turín
Como funciona:
- Escanee o código QR en MachineMacker 2.0 para vincular a aplicación co proxecto;
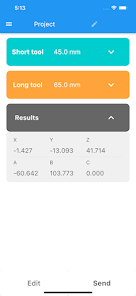
- Recoller os datos TCP do robot. Primeiro cunha ferramenta curta, despois cunha longa;
- Introduza a lectura XYZ. Introduza a lonxitude do saliente das ferramentas desde o fuso en milímetros
Fai clic en "Calcular"
A aplicación para transferir automaticamente datos sobre a posición das ferramentas a MachineMaker 2.0.
A calibración do robot admite a calibración TCP para os seguintes tipos de robots:
- Fanuc
- Kuka
- Tormach
- Borunte
- CRP
- Denso
- Dobot
-Estun
- Ola
- Hyundai
- Motoman
- Newker
- Manutec
- Nachi
- OTC Daihen
- Turín
Como funciona:
- Escanee o código QR en MachineMacker 2.0 para vincular a aplicación co proxecto;
- Recoller os datos TCP do robot. Primeiro cunha ferramenta curta, despois cunha longa;
- Introduza a lectura XYZ. Introduza a lonxitude do saliente das ferramentas desde o fuso en milímetros
Fai clic en "Calcular"
Última actualización
A seguranza pasa por entender como recompilan e comparten os teus datos os programadores. As prácticas relacionadas coa seguranza e a privacidade dos datos utilizadas poden variar en función do uso, a rexión e a idade. O programador facilitou esta información e pode modificala co paso do tempo.

Non se comparten datos con terceiros
Máis información sobre como fan os programadores declaracións acerca dos datos que comparten

Non se recompila ningún dato
Máis información sobre como fan os programadores declaracións acerca da recompilación de datos
Servizo de asistencia da aplicación
Acerca do programador
SPRUTCAM TECH LIMITED
hazrat@sprutcam.io
9 Aiolou & Panagioti Diomidous
Limassol 3020
Cyprus
+357 97 620294