Langton's Ant - cell Games
જાહેરાતો ધરાવે છે
3.2star
23 રિવ્યૂ
500+
ડાઉનલોડ

પ્રત્યેક
info






આ ગેમ વિશે
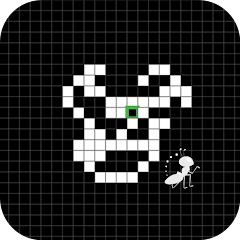
લેંગટોનની કીડી એક સેલ્યુલર ઓટોમેટોન છે જે કેટલાક મૂળભૂત નિયમોને અનુસરીને કીડી કોશિકાઓના ગ્રીડ પર આગળ વધે છે.
સિમ્યુલેશનની શરૂઆતમાં, કીડી રેન્ડમલી સફેદ કોષોના 2 ડી-ગ્રીડ પર સ્થિત છે. કીડીને દિશા પણ આપવામાં આવે છે (કાં તો ઉપર, નીચે, ડાબે અથવા જમણે).
કીડી પછી તે જે કોષમાં બેઠો છે તેના રંગ મુજબ નીચે મુજબના નિયમો સાથે ફરે છે:
1. જો કોષ સફેદ હોય, તો તે કાળા રંગમાં બદલાય છે અને કીડી 90 right બરાબર વળે છે.
2. જો કોષ કાળો હોય, તો તે સફેદમાં બદલાય છે અને કીડી 90 left ડાબી તરફ વળે છે.
3. પછી કીડી આગળના કોષ તરફ આગળ વધે છે, અને પગલું 1 થી પુનરાવર્તન કરે છે.
આ સરળ નિયમો જટિલ વર્તણૂકો તરફ દોરી જાય છે. સંપૂર્ણપણે સફેદ ગ્રીડ શરૂ કરતી વખતે વર્તનની ત્રણ અલગ અલગ રીતો સ્પષ્ટ છે:
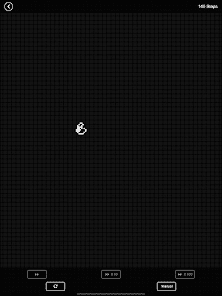
- સરળતા: પ્રથમ થોડા સો ચાલ દરમિયાન તે ખૂબ જ સરળ પેટર્ન બનાવે છે જે ઘણી વખત સપ્રમાણ હોય છે.
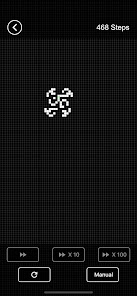
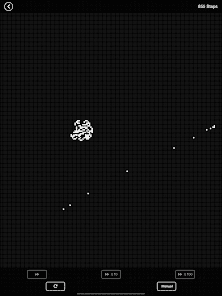
- કેઓસ: થોડા સો ચાલ પછી, કાળા અને સફેદ ચોરસની મોટી, અનિયમિત પેટર્ન દેખાય છે. કીડી લગભગ 10,000 પગથિયા સુધી સ્યુડો-રેન્ડમ પાથ શોધી કાે છે.
- ઇમર્જન્સી ઓર્ડર: છેવટે કીડી 104 પગલાઓની પુનરાવર્તિત "હાઇવે" પેટર્ન બનાવવાનું શરૂ કરે છે જે અનિશ્ચિતપણે પુનરાવર્તન કરે છે.
ચકાસાયેલ તમામ મર્યાદિત પ્રારંભિક રૂપરેખાંકનો આખરે સમાન પુનરાવર્તિત પેટર્નમાં ભેગા થાય છે, જે સૂચવે છે કે "હાઇવે" લેંગટોનની કીડીનું આકર્ષક છે, પરંતુ કોઈ પણ સાબિત કરી શક્યું નથી કે આવી બધી પ્રારંભિક ગોઠવણીઓ માટે આ સાચું છે.
સિમ્યુલેશનની શરૂઆતમાં, કીડી રેન્ડમલી સફેદ કોષોના 2 ડી-ગ્રીડ પર સ્થિત છે. કીડીને દિશા પણ આપવામાં આવે છે (કાં તો ઉપર, નીચે, ડાબે અથવા જમણે).
કીડી પછી તે જે કોષમાં બેઠો છે તેના રંગ મુજબ નીચે મુજબના નિયમો સાથે ફરે છે:
1. જો કોષ સફેદ હોય, તો તે કાળા રંગમાં બદલાય છે અને કીડી 90 right બરાબર વળે છે.
2. જો કોષ કાળો હોય, તો તે સફેદમાં બદલાય છે અને કીડી 90 left ડાબી તરફ વળે છે.
3. પછી કીડી આગળના કોષ તરફ આગળ વધે છે, અને પગલું 1 થી પુનરાવર્તન કરે છે.
આ સરળ નિયમો જટિલ વર્તણૂકો તરફ દોરી જાય છે. સંપૂર્ણપણે સફેદ ગ્રીડ શરૂ કરતી વખતે વર્તનની ત્રણ અલગ અલગ રીતો સ્પષ્ટ છે:
- સરળતા: પ્રથમ થોડા સો ચાલ દરમિયાન તે ખૂબ જ સરળ પેટર્ન બનાવે છે જે ઘણી વખત સપ્રમાણ હોય છે.
- કેઓસ: થોડા સો ચાલ પછી, કાળા અને સફેદ ચોરસની મોટી, અનિયમિત પેટર્ન દેખાય છે. કીડી લગભગ 10,000 પગથિયા સુધી સ્યુડો-રેન્ડમ પાથ શોધી કાે છે.
- ઇમર્જન્સી ઓર્ડર: છેવટે કીડી 104 પગલાઓની પુનરાવર્તિત "હાઇવે" પેટર્ન બનાવવાનું શરૂ કરે છે જે અનિશ્ચિતપણે પુનરાવર્તન કરે છે.
ચકાસાયેલ તમામ મર્યાદિત પ્રારંભિક રૂપરેખાંકનો આખરે સમાન પુનરાવર્તિત પેટર્નમાં ભેગા થાય છે, જે સૂચવે છે કે "હાઇવે" લેંગટોનની કીડીનું આકર્ષક છે, પરંતુ કોઈ પણ સાબિત કરી શક્યું નથી કે આવી બધી પ્રારંભિક ગોઠવણીઓ માટે આ સાચું છે.
આ રોજ અપડેટ કર્યું
ડેવલપર તમારો ડેટા કેવી રીતે એકત્રિત અને શેર કરે છે, તે સમજવાથી સુરક્ષાની શરૂઆત થાય છે. તમારા દ્વારા ઍપનો ઉપયોગ, ઉપયોગ થાય તે પ્રદેશ અને તમારી ઉંમરના આધારે ડેટાની પ્રાઇવસી અને સુરક્ષા પદ્ધતિઓ અલગ-અલગ હોઈ શકે છે. ડેવલપર દ્વારા આ માહિતી પ્રદાન કરવામાં આવી છે અને તેઓ સમયાંતરે તેને અપડેટ કરી શકે છે.




નવું શું છે
Langton’s Ant is a cellular automaton that models an ant moving on a grid of cells following some very basic rules.
ઍપ સપોર્ટ
ડેવલપર વિશે
于瑞锋
angeltop123@gmail.com
China
undefined








