
AndrDron
500+
ડાઉનલોડ

પ્રત્યેક
info

આ ગેમ વિશે
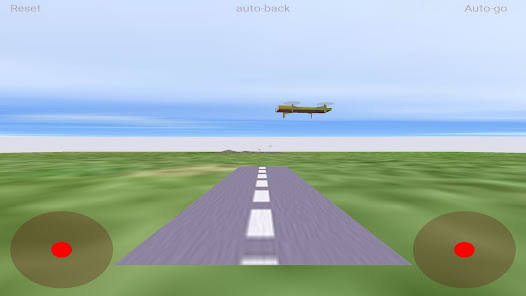
તમે ડ્રોનને ઝડપ, ઊંચાઈ અને રોટેશનમાં હેન્ડલ કરી શકો છો.
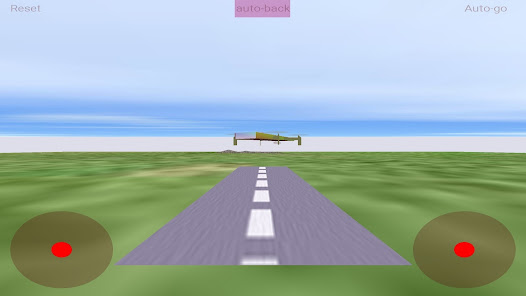
પ્રારંભિક સ્થિતિ પર પાછા આવવા માટે સ્વતઃ-બેક.
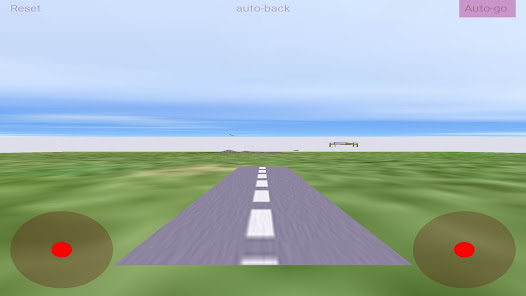
આપોઆપ ઉડવા માટે સ્વતઃ જાઓ.
કાર્યક્રમ:
સ્થિરાંકો: pi અને કોઈપણ int/ફ્લોટિંગ નંબર
ચલો: u v
ઓપરેટર્સ: + - * / > < == & |
કાર્યો: if(exp,exp1,exp2)
sin() cos() tan() asin() acos() atan()
sinh() cosh() tanh() log() ln() rand()
exp() abs() sqrt() pow(આધાર, ઘાતાંક)
પ્રોગ્રામ માટેની સૂચનાઓ
// ટિપ્પણીઓ માટે
ઝડપ = આડી ગતિ.
speedh = ઊભી ગતિ.
ang= આડો કોણ.
રાહ = રાહ અંતરાલ.
રીસેટ રીસેટ ક્રિયા.
autog ઑટો-ગો એક્શન.
autob ઑટો-બેક ક્રિયા.
પુનરાવર્તિત ક્રિયાઓ માટે do - enddo નો ઉપયોગ કરો. નમૂના 5 જુઓ.
પ્રારંભિક સ્થિતિ પર પાછા આવવા માટે સ્વતઃ-બેક.
આપોઆપ ઉડવા માટે સ્વતઃ જાઓ.
કાર્યક્રમ:
સ્થિરાંકો: pi અને કોઈપણ int/ફ્લોટિંગ નંબર
ચલો: u v
ઓપરેટર્સ: + - * / > < == & |
કાર્યો: if(exp,exp1,exp2)
sin() cos() tan() asin() acos() atan()
sinh() cosh() tanh() log() ln() rand()
exp() abs() sqrt() pow(આધાર, ઘાતાંક)
પ્રોગ્રામ માટેની સૂચનાઓ
// ટિપ્પણીઓ માટે
ઝડપ = આડી ગતિ.
speedh = ઊભી ગતિ.
ang= આડો કોણ.
રાહ = રાહ અંતરાલ.
રીસેટ રીસેટ ક્રિયા.
autog ઑટો-ગો એક્શન.
autob ઑટો-બેક ક્રિયા.
પુનરાવર્તિત ક્રિયાઓ માટે do - enddo નો ઉપયોગ કરો. નમૂના 5 જુઓ.
આ રોજ અપડેટ કર્યું
ડેવલપર તમારો ડેટા કેવી રીતે એકત્રિત અને શેર કરે છે, તે સમજવાથી સુરક્ષાની શરૂઆત થાય છે. તમારા દ્વારા ઍપનો ઉપયોગ, ઉપયોગ થાય તે પ્રદેશ અને તમારી ઉંમરના આધારે ડેટાની પ્રાઇવસી અને સુરક્ષા પદ્ધતિઓ અલગ-અલગ હોઈ શકે છે. ડેવલપર દ્વારા આ માહિતી પ્રદાન કરવામાં આવી છે અને તેઓ સમયાંતરે તેને અપડેટ કરી શકે છે.


નવું શું છે?
2.2 Android U
1.8 Use of random function
1.7 Error detector
1.6 Drone coordinates
1.5 More Samples
1.4 Program
1.3 Android S
1.8 Use of random function
1.7 Error detector
1.6 Drone coordinates
1.5 More Samples
1.4 Program
1.3 Android S
ઍપ સપોર્ટ
ડેવલપર વિશે
Leopoldo Rodriguez Cabañas
leorodwm@gmail.com
Spain
undefined





