
LiDAR VR Viewer
רכישות מתוך האפליקציה
3.7star
1.12K ביקורות
+50K
הורדות

כולם
info

מידע על אפליקציה זו
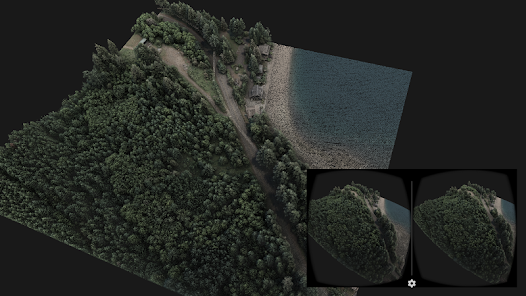
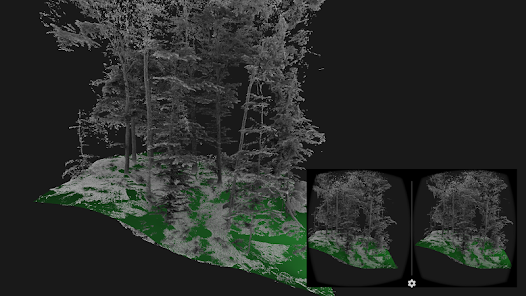
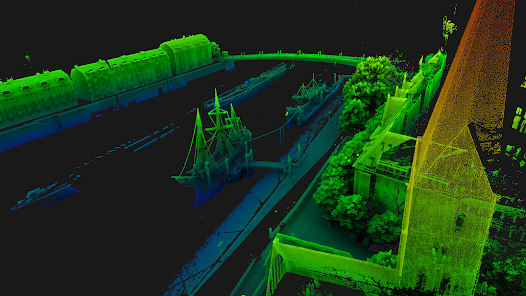
לידר VR Viewer מוקדש להדמיה של נקודת עננים ומשטחים כחוויה immersive באמצעות מציאות מדומה. בעזרת ג'ויסטיק Bluetooth ותצוגה פשוט רכוב ראש כגון קרטון גוגל, הוא הופך לכלי רב עצמה כדי לחקור ולחקור נתוני 3D.
מאמר מדעי המתאר את היישום הזה כבר פורסם דברי הכנס הבינלאומי ה -11 על גרפיקה ממוחשבת, ויזואליזציה, ראיה ממוחשבת ועיבוד תמונה (2017)
תכונות:
• פותח עבור ראש מציאות מדומה רכוב תצוגות כאלה לגוגל קרטון
• עיבוד כל-ילידי ניצול OpenGL ES 2.0
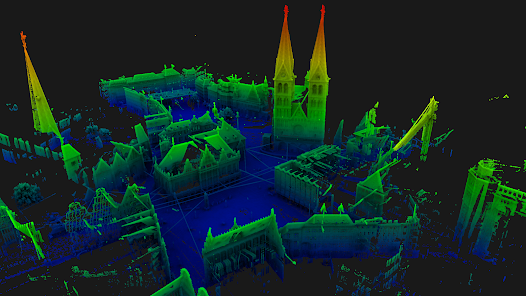
• תומך בקבצי ASCII ענן נקודה
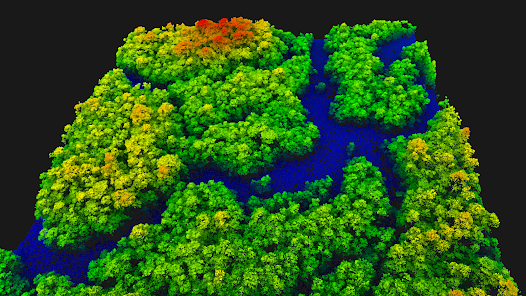
• צבעים הנקודות מן הגובה, העוצמה או ערכי RGB
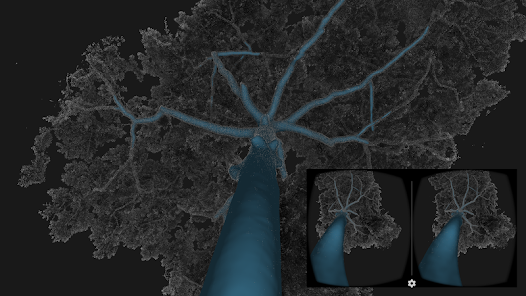
• תומך ענן נקודה עם הנורמלים, כפי שניתן surfel (עבודה בתהליך)
• תומך עננים נקודים עד נקודות מיליון ספורים (תלוי GPU סמארטפון)
• תומך משטח רשת קבצי .obj Wavefront
• תנועת מצלמה בקר עם בקר-שן הכחול או מסך מגע
• * קבצי הדגמה * חדש להוריד-מסוגל ממסך ההתחלה
• * חדש * מיפוי לחצן של בקר הכחולה-שן מפורטת בתפריט למסך הפתיחה
• * חדש * מצב יציקה לשדר מודל 3D בטלביזיה (דורש בקר)
הערה:
קבצי ASCII קלט כרגע הנתמכים הם כדלקמן, ללא כותרת (העמודות חייבות להיות מופרדות על ידי אופי מרחב: " ")
• 3 עמודות Z X Y:
1.234 2.567 3.891
• 4 עמודות עוצמת Z X Y (float):
1.234 2.567 3.891 0.2
• 6 עמודות X Y Z R G B [0-255]:
1.234 2.567 3.891 125 250 135
• 6 עמודות X Y Z Nx Ny ניו זילנד (קואורדינטות + הנורמלים):
1.234 2.567 3.891 0.11 0.07 0.91
מאמר מדעי המתאר את היישום הזה כבר פורסם דברי הכנס הבינלאומי ה -11 על גרפיקה ממוחשבת, ויזואליזציה, ראיה ממוחשבת ועיבוד תמונה (2017)
תכונות:
• פותח עבור ראש מציאות מדומה רכוב תצוגות כאלה לגוגל קרטון
• עיבוד כל-ילידי ניצול OpenGL ES 2.0
• תומך בקבצי ASCII ענן נקודה
• צבעים הנקודות מן הגובה, העוצמה או ערכי RGB
• תומך ענן נקודה עם הנורמלים, כפי שניתן surfel (עבודה בתהליך)
• תומך עננים נקודים עד נקודות מיליון ספורים (תלוי GPU סמארטפון)
• תומך משטח רשת קבצי .obj Wavefront
• תנועת מצלמה בקר עם בקר-שן הכחול או מסך מגע
• * קבצי הדגמה * חדש להוריד-מסוגל ממסך ההתחלה
• * חדש * מיפוי לחצן של בקר הכחולה-שן מפורטת בתפריט למסך הפתיחה
• * חדש * מצב יציקה לשדר מודל 3D בטלביזיה (דורש בקר)
הערה:
קבצי ASCII קלט כרגע הנתמכים הם כדלקמן, ללא כותרת (העמודות חייבות להיות מופרדות על ידי אופי מרחב: " ")
• 3 עמודות Z X Y:
1.234 2.567 3.891
• 4 עמודות עוצמת Z X Y (float):
1.234 2.567 3.891 0.2
• 6 עמודות X Y Z R G B [0-255]:
1.234 2.567 3.891 125 250 135
• 6 עמודות X Y Z Nx Ny ניו זילנד (קואורדינטות + הנורמלים):
1.234 2.567 3.891 0.11 0.07 0.91
עדכון אחרון בתאריך
כדי לשמור על הבטיחות צריך קודם כל להבין איך המפתחים אוספים ומשתפים את הנתונים שלך. נוהלי פרטיות הנתונים ואבטחת הנתונים עשויים להשתנות בהתאם לשימוש, לאזור ולגיל המשתמש. המפתח סיפק את המידע הזה והוא עשוי לעדכן אותו מדי פעם.

לא מתבצע שיתוף נתונים עם צדדים שלישיים

לא נאספו נתונים
דירוגים וביקורות
3.7
1.11K ביקורות
מה חדש
Cel shading is now combined with SSAO for a better visual result
Previous version:
- Bug fix: openGL depth got buggy in the last version
- Experimental feature: cel shading to enhance the point clouds visualization
- Screen touch control now available again
- Added one extra demo dataset: 4 millions points forest LiDAR scan
Previous version:
- Bug fix: openGL depth got buggy in the last version
- Experimental feature: cel shading to enhance the point clouds visualization
- Screen touch control now available again
- Added one extra demo dataset: 4 millions points forest LiDAR scan