
Arduino Bluetooth Controller
מכיל מודעות
2.9star
919 ביקורות
+100K
הורדות

כולם
info




מידע על האפליקציה הזו
האם אתה חובב Arduino שתמיד רצה לשלוט מרחוק הפרויקטים שלך באמצעות טלפון אנדרואיד שלך, אבל לא היה לי הזמן, הסבלנות או הידע לבנות אנדרואיד Bluetooth בקר? אז Arduino BLUETOOTH הבקר הוא מה שאתה צריך!
יישום אנדרואיד זה יכול ליצור חיבור עם כל פרויקט Arduino / מיקרו שיש בו מודול Bluetooth! היא מאפשרת למשתמש להגדיר UUID של מודול Bluetooth שלו כדי לחבר את יישום אנדרואיד עם הפרויקטים שלו! UUID ברירת המחדל שמגיע עם היישום הזה הוא בשביל סידורי 4 הפינים Bluetooth RF Transceiver Module RS232 HC-06 האלחוטית. (אם אתה משתמש בUUID ברירת מחדל כדי להתאים את מודול BT עם הטלפון החכם שלך בפעם הראשונה, אתה תצטרך לתת סיסמא בת 4 ספרות. סיסמא זו '1234 '.)
היישום מורכב של 4 מצבי פיקוד:
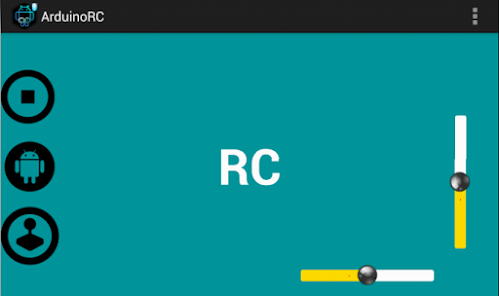
1. מצב רכב: על ידי לחיצה על הכפתור "ג'ויסטיק" המשתמש מרוחק יכול לשלוט ברכב עם מחוות ספציפיות. לפרשנות של מחוות לפקודות, היישום משתמש בחיישן התנועה המובנה במכשיר החכם. ישנם 8 מחוות שונות זמינות (מלפנים, מאחור, שמאלה, ימינה, FRONT_LEFT, FRONT_RIGHT, BACK_LEFT, BACK_RIGHT).
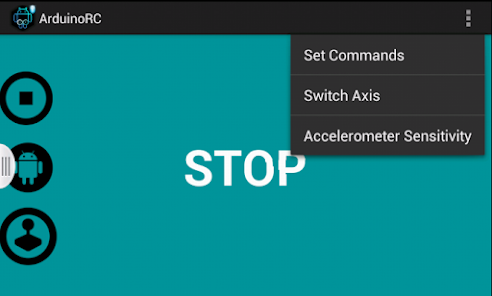
באפשרותך להגדיר מחוות אלה עם פקודות מותאמות אישית משלך באמצעות לחצן התפריט "הסט פקודות".
בנוסף, יש תחנה ולחצן ה-שניתן להקצות עם פקודות מותאמות אישית גם כן.
חשוב *** *** המצב מספק באמצעות אפשרויות תפריט את האפשרות לשנות את הכיוון של axises התאוצה (X-> Y, Y-> X) כדי לפעול כראוי במכשירי אנדרואיד עם כיוון ברירת מחדל שונה.
יתר על כן, אפשרויות תפריט מספקות כפתור שינוי רגישות כדי לשנות את הנקודה שבה האפליקציה תופסת את האירועים מחווה למצב זה. כפי שמרמזת הכותרת, מצב זה היא תוכנן במיוחד מרחוק כדי לשלוט ברכב אשר עושה שימוש במודול Bluetooth ומייקרו.
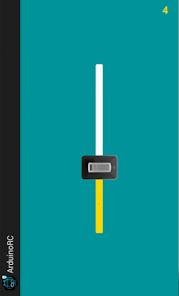
2. מדעך מצב: מצב זה מספק את המשתמש עם מדעך-seekbar שיכול לשלוח פקודות 0-9 ומאפשר למשתמש להתנסות עם servos, נוריות, מנועים ועוד רבים.
3. בקר מצב: מצב זה מספק פריסת בקר רגילה עם 10 כפתורים בסך הכל שניתן להקצות עם פקודות מותאמות אישית. לחצני החצים נועדו במיוחד כדי לשלוח פקודות ברציפות ואילו נלחצו, על מנת לדמות הבקר בפועל.
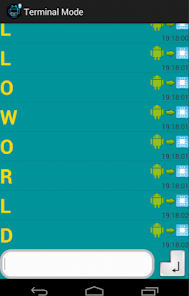
4. מצב סופני: מצב זה מספק ממשק דמוי מסופים שבו המשתמש יכול להקליד ולשלוח פקודות בודדות או מרובות אשר יבצעו ברצף. מאז יציאה טורית Arduino מקבלת בית אחד בכל פעם, אם המשתמש מקליד מחרוזת בשדה טקסט הקלט, יישום מחלק מחרוזת שלתווים ושולח אותם אחד אחד כדי Arduino. יש לציין כי ברווחים או במחרוזות ריקות לדלג עליו.
כל הגדרות היישום והפקודות באופן קבוע מאוחסנות וניתן לגשת אליו ולשנות בכל עת בהתאם לצרכים שלך.
# # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # #
Arduino צד קוד
להלן קוד היא דוגמא לאופן שArduino יכול "להקשיב" את הפקודות שמקבלת דרך יישום Android זה.
char incomingByte; / / משתנה לקבל נתונים מהיציאה טורית
הגדרת חלל () {
Serial.begin (9,600); / / להתחיל תקשורת טורית ב9600bps
}
לולאת חלל () {
אם (Serial.available ()> 0) / / אם נתונים זמינים לקריאה
{
incomingByte = Serial.read (); / / לקרוא אותו ולאחסן אותו ב'incomingByte '
}
}
____________________________________
© "Arduino" הוא סימן מסחרי של צוות Arduino
____________________________________
יישום אנדרואיד זה יכול ליצור חיבור עם כל פרויקט Arduino / מיקרו שיש בו מודול Bluetooth! היא מאפשרת למשתמש להגדיר UUID של מודול Bluetooth שלו כדי לחבר את יישום אנדרואיד עם הפרויקטים שלו! UUID ברירת המחדל שמגיע עם היישום הזה הוא בשביל סידורי 4 הפינים Bluetooth RF Transceiver Module RS232 HC-06 האלחוטית. (אם אתה משתמש בUUID ברירת מחדל כדי להתאים את מודול BT עם הטלפון החכם שלך בפעם הראשונה, אתה תצטרך לתת סיסמא בת 4 ספרות. סיסמא זו '1234 '.)
היישום מורכב של 4 מצבי פיקוד:
1. מצב רכב: על ידי לחיצה על הכפתור "ג'ויסטיק" המשתמש מרוחק יכול לשלוט ברכב עם מחוות ספציפיות. לפרשנות של מחוות לפקודות, היישום משתמש בחיישן התנועה המובנה במכשיר החכם. ישנם 8 מחוות שונות זמינות (מלפנים, מאחור, שמאלה, ימינה, FRONT_LEFT, FRONT_RIGHT, BACK_LEFT, BACK_RIGHT).
באפשרותך להגדיר מחוות אלה עם פקודות מותאמות אישית משלך באמצעות לחצן התפריט "הסט פקודות".
בנוסף, יש תחנה ולחצן ה-שניתן להקצות עם פקודות מותאמות אישית גם כן.
חשוב *** *** המצב מספק באמצעות אפשרויות תפריט את האפשרות לשנות את הכיוון של axises התאוצה (X-> Y, Y-> X) כדי לפעול כראוי במכשירי אנדרואיד עם כיוון ברירת מחדל שונה.
יתר על כן, אפשרויות תפריט מספקות כפתור שינוי רגישות כדי לשנות את הנקודה שבה האפליקציה תופסת את האירועים מחווה למצב זה. כפי שמרמזת הכותרת, מצב זה היא תוכנן במיוחד מרחוק כדי לשלוט ברכב אשר עושה שימוש במודול Bluetooth ומייקרו.
2. מדעך מצב: מצב זה מספק את המשתמש עם מדעך-seekbar שיכול לשלוח פקודות 0-9 ומאפשר למשתמש להתנסות עם servos, נוריות, מנועים ועוד רבים.
3. בקר מצב: מצב זה מספק פריסת בקר רגילה עם 10 כפתורים בסך הכל שניתן להקצות עם פקודות מותאמות אישית. לחצני החצים נועדו במיוחד כדי לשלוח פקודות ברציפות ואילו נלחצו, על מנת לדמות הבקר בפועל.
4. מצב סופני: מצב זה מספק ממשק דמוי מסופים שבו המשתמש יכול להקליד ולשלוח פקודות בודדות או מרובות אשר יבצעו ברצף. מאז יציאה טורית Arduino מקבלת בית אחד בכל פעם, אם המשתמש מקליד מחרוזת בשדה טקסט הקלט, יישום מחלק מחרוזת שלתווים ושולח אותם אחד אחד כדי Arduino. יש לציין כי ברווחים או במחרוזות ריקות לדלג עליו.
כל הגדרות היישום והפקודות באופן קבוע מאוחסנות וניתן לגשת אליו ולשנות בכל עת בהתאם לצרכים שלך.
# # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # #
Arduino צד קוד
להלן קוד היא דוגמא לאופן שArduino יכול "להקשיב" את הפקודות שמקבלת דרך יישום Android זה.
char incomingByte; / / משתנה לקבל נתונים מהיציאה טורית
הגדרת חלל () {
Serial.begin (9,600); / / להתחיל תקשורת טורית ב9600bps
}
לולאת חלל () {
אם (Serial.available ()> 0) / / אם נתונים זמינים לקריאה
{
incomingByte = Serial.read (); / / לקרוא אותו ולאחסן אותו ב'incomingByte '
}
}
____________________________________
© "Arduino" הוא סימן מסחרי של צוות Arduino
____________________________________
עדכון אחרון בתאריך
כדי לשמור על הבטיחות צריך קודם כל להבין איך המפתחים אוספים ומשתפים את הנתונים שלך. נוהלי פרטיות הנתונים ואבטחת הנתונים עשויים להשתנות בהתאם לשימוש, לאזור ולגיל המשתמש. המפתח סיפק את המידע הזה והוא עשוי לעדכן אותו מדי פעם.

לא מתבצע שיתוף נתונים עם צדדים שלישיים

לא נאספו נתונים
דירוגים וביקורות
2.9
827 ביקורות
תמיכה באפליקציה
מידע על מפתחי האפליקציה
ioannis tzanellis
ioannis.kiwe@gmail.com
Netherlands
undefined