
LiDAR VR Viewer
इन-ऐप्लिकेशन खरीदारी
3.7star
1.12 हज़ार समीक्षाएं
50 हज़ार+
डाउनलोड

सभी
info

इस ऐप्लिकेशन के बारे में जानकारी
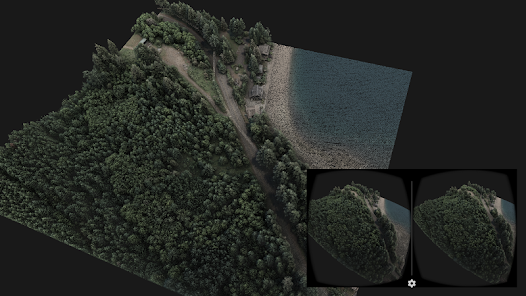
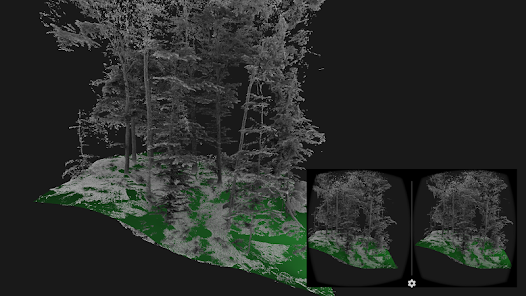
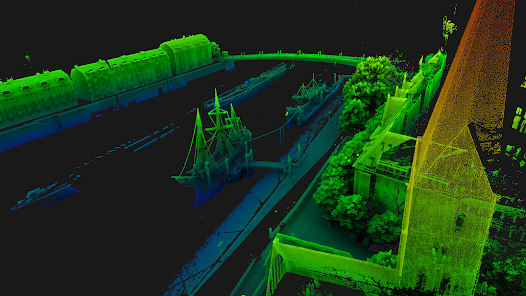
LIDAR का वी.आर. व्यूअर आभासी वास्तविकता के माध्यम से लंबे अनुभव के रूप में बिंदु बादल और सतहों के दृश्य के लिए समर्पित है। एक ब्लूटूथ नियंत्रक और एक साधारण सिर पर लगे गूगल गत्ता के रूप में इस तरह के प्रदर्शन के साथ, यह जांच करेंगे और 3 डी डेटा का पता लगाने के एक शक्तिशाली उपकरण बन जाता है।
एक वैज्ञानिक कागज इस एप्लिकेशन का वर्णन कंप्यूटर ग्राफिक्स, दृश्य, कंप्यूटर विजन और छवि प्रसंस्करण पर 11 वीं अंतर्राष्ट्रीय सम्मेलन की कार्यवाही में प्रकाशित किया गया (2017)
विशेषताएं:
• आभासी वास्तविकता सिर के लिए विकसित घुड़सवार प्रदर्शित करता है जैसे कि गूगल कार्डबोर्ड है
• सभी देशी प्रतिपादन ओपन ES 2.0 का उपयोग
• बिंदु बादल ASCII फाइलों का समर्थन करता है
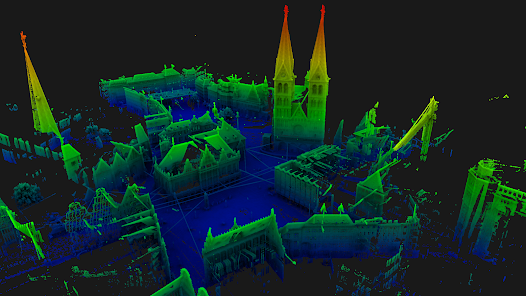
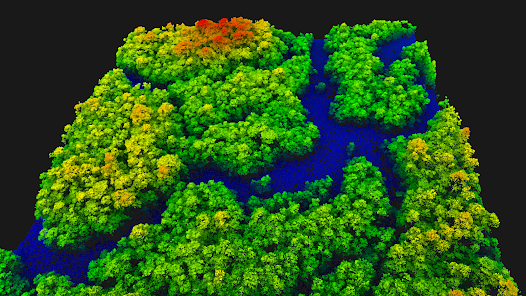
• रंग उन्नयन, तीव्रता या आरजीबी मूल्यों से अंक
• समर्थन करता है normals के साथ बिंदु बादल, surfel रूप में प्रदान की (प्रगति में काम)
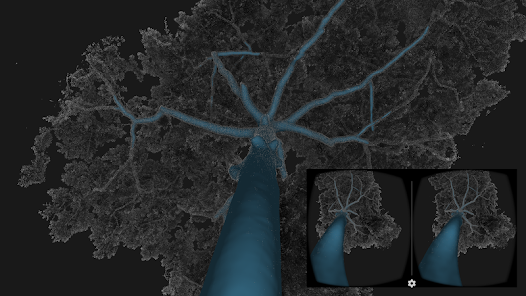
• कुछ लाखों अंकों तक बिंदु बादलों का समर्थन करता है (स्मार्टफोन GPU पर निर्भर करता है)
• सतह जाल Wavefront .obj फ़ाइलों का समर्थन करता है
ब्लू टूथ नियंत्रक या टचस्क्रीन के साथ • नियंत्रण कैमरा आंदोलन
• * नई * डेमो फ़ाइलें प्रारंभ स्क्रीन से डाउनलोड करने योग्य
नीली दांत नियंत्रक के • * नई * बटन मानचित्रण प्रारंभ स्क्रीन मेनू में दिए गए विवरण
• * नई * कास्टिंग टीवी पर 3 डी मॉडल का प्रसारण करने के मोड (एक नियंत्रक की आवश्यकता है)
टिप्पणी:
वर्तमान में समर्थित इनपुट ASCII फ़ाइलें इस प्रकार हैं, हेडर के बिना (स्तंभों अंतरिक्ष चरित्र से अलग किया जाना चाहिए: "")
• 3 कॉलम X Y Z:
1.234 2.567 3.891
• 4 कॉलम X Y Z तीव्रता (नाव):
1.234 2.567 3.891 0.2
• 6 कॉलम X Y Z आर जी बी [0-255]:
1.234 2.567 3.891 125 250 135
• 6 कॉलम X Y Z एन एक्स न्यूयॉर्क NZ (निर्देशांक + normals):
1.234 2.567 3.891 0.11 0.07 0.91
एक वैज्ञानिक कागज इस एप्लिकेशन का वर्णन कंप्यूटर ग्राफिक्स, दृश्य, कंप्यूटर विजन और छवि प्रसंस्करण पर 11 वीं अंतर्राष्ट्रीय सम्मेलन की कार्यवाही में प्रकाशित किया गया (2017)
विशेषताएं:
• आभासी वास्तविकता सिर के लिए विकसित घुड़सवार प्रदर्शित करता है जैसे कि गूगल कार्डबोर्ड है
• सभी देशी प्रतिपादन ओपन ES 2.0 का उपयोग
• बिंदु बादल ASCII फाइलों का समर्थन करता है
• रंग उन्नयन, तीव्रता या आरजीबी मूल्यों से अंक
• समर्थन करता है normals के साथ बिंदु बादल, surfel रूप में प्रदान की (प्रगति में काम)
• कुछ लाखों अंकों तक बिंदु बादलों का समर्थन करता है (स्मार्टफोन GPU पर निर्भर करता है)
• सतह जाल Wavefront .obj फ़ाइलों का समर्थन करता है
ब्लू टूथ नियंत्रक या टचस्क्रीन के साथ • नियंत्रण कैमरा आंदोलन
• * नई * डेमो फ़ाइलें प्रारंभ स्क्रीन से डाउनलोड करने योग्य
नीली दांत नियंत्रक के • * नई * बटन मानचित्रण प्रारंभ स्क्रीन मेनू में दिए गए विवरण
• * नई * कास्टिंग टीवी पर 3 डी मॉडल का प्रसारण करने के मोड (एक नियंत्रक की आवश्यकता है)
टिप्पणी:
वर्तमान में समर्थित इनपुट ASCII फ़ाइलें इस प्रकार हैं, हेडर के बिना (स्तंभों अंतरिक्ष चरित्र से अलग किया जाना चाहिए: "")
• 3 कॉलम X Y Z:
1.234 2.567 3.891
• 4 कॉलम X Y Z तीव्रता (नाव):
1.234 2.567 3.891 0.2
• 6 कॉलम X Y Z आर जी बी [0-255]:
1.234 2.567 3.891 125 250 135
• 6 कॉलम X Y Z एन एक्स न्यूयॉर्क NZ (निर्देशांक + normals):
1.234 2.567 3.891 0.11 0.07 0.91
पिछली बार अपडेट होने की तारीख
आपके डेटा की सुरक्षा, इस बात पर निर्भर करती है कि डेवलपर, डेटा को कैसे इकट्ठा और शेयर करते हैं. डेटा को निजी और सुरक्षित रखने के तरीके अलग-अलग हो सकते हैं. ये आपकी जगह, उम्र, और ऐप्लिकेशन के इस्तेमाल के हिसाब से तय किए जाते हैं. यह जानकारी डेवलपर उपलब्ध कराता है और समय-समय पर इस जानकारी को अपडेट भी किया जा सकता है.

तीसरे पक्षों के साथ कोई डेटा शेयर नहीं किया जाता
डेवलपर किस तरह से आपका डेटा शेयर करते हैं, इस बारे में ज़्यादा जानें

कोई डेटा इकट्ठा नहीं किया गया
डेवलपर किस तरह से आपका डेटा इकट्ठा करते हैं, इस बारे में ज़्यादा जानें
रेटिंग और समीक्षाएं
3.7
1.11 हज़ार समीक्षाएं
नया क्या है
Cel shading is now combined with SSAO for a better visual result
Previous version:
- Bug fix: openGL depth got buggy in the last version
- Experimental feature: cel shading to enhance the point clouds visualization
- Screen touch control now available again
- Added one extra demo dataset: 4 millions points forest LiDAR scan
Previous version:
- Bug fix: openGL depth got buggy in the last version
- Experimental feature: cel shading to enhance the point clouds visualization
- Screen touch control now available again
- Added one extra demo dataset: 4 millions points forest LiDAR scan