
Arm Robot Control Makerslab
1천+
다운로드

전체이용가
info

앱 정보
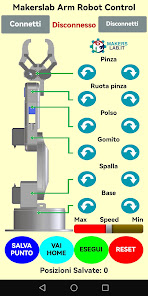
이 애플리케이션을 사용하면 HC-05 또는 HC-06 Bluetooth 모듈과 Arduino 보드가 장착된 로봇 팔을 제어할 수 있습니다.
프로젝트 영역에서 로봇 팔의 조립 및 프로그래밍에 대한 지침을 찾을 수 있습니다.
https://www.makerslab.it/progetti/
지침:
이 애플리케이션을 사용하기 전에 Bluetooth 모듈을 Android 장치와 페어링해야 합니다.
페어링되면 "Makerslab Arm Robot Control" 애플리케이션을 열고 "연결"을 탭한 후 이전에 페어링된 Bluetooth 모듈을 선택합니다.
————
명령 → 관련 문자
캘리퍼스 열림 → S
클램프 닫힘 → s
그리퍼 회전 + → C
그리퍼 회전 – → c
손목 회전 + → Q
손목 회전 – → q
팔꿈치 회전 + → T
팔꿈치 회전 – → t
어깨 회전 + → R
어깨 회전 – → d
베이스 회전 + → U
기본 회전 – → u
속도 제어 → 0 .. 9
세이브 포인트 →
홈으로 이동 → H
달리다 → E
재설정 → Z
프로젝트 영역에서 로봇 팔의 조립 및 프로그래밍에 대한 지침을 찾을 수 있습니다.
https://www.makerslab.it/progetti/
지침:
이 애플리케이션을 사용하기 전에 Bluetooth 모듈을 Android 장치와 페어링해야 합니다.
페어링되면 "Makerslab Arm Robot Control" 애플리케이션을 열고 "연결"을 탭한 후 이전에 페어링된 Bluetooth 모듈을 선택합니다.
————
명령 → 관련 문자
캘리퍼스 열림 → S
클램프 닫힘 → s
그리퍼 회전 + → C
그리퍼 회전 – → c
손목 회전 + → Q
손목 회전 – → q
팔꿈치 회전 + → T
팔꿈치 회전 – → t
어깨 회전 + → R
어깨 회전 – → d
베이스 회전 + → U
기본 회전 – → u
속도 제어 → 0 .. 9
세이브 포인트 →
홈으로 이동 → H
달리다 → E
재설정 → Z
업데이트 날짜



새로운 기능
Incrementata compatibilità
앱 지원
개발자 소개
Roberto Beligni
fablab@makerslab.it
Italy