
AndrDron
500+
Téléchargements

Tout public
info

À propos de ce jeu
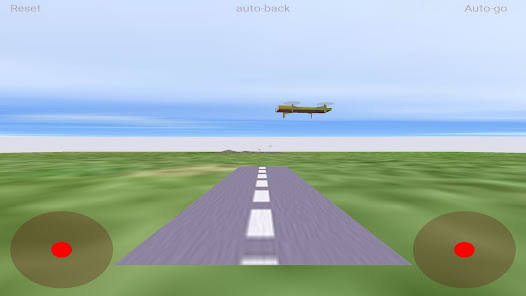
You can handle the drone in speed, height and rotation.
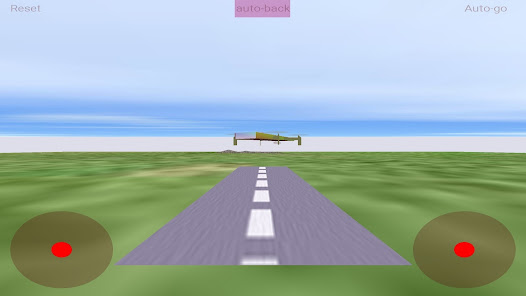
Auto-back to return to the initial position.
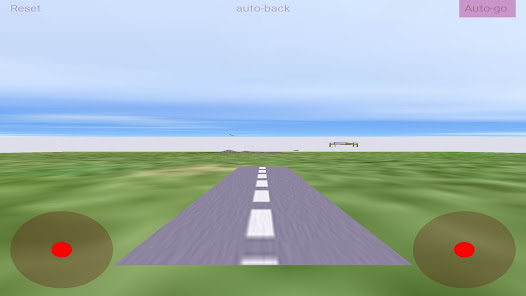
Auto-go to fly automatically.
Program:
Constants: pi and any int/floating number
Variables: u v
Operators: + - * / > < == & |
Functions: if(exp,exp1,exp2)
sin() cos() tan() asin() acos() atan()
sinh() cosh() tanh() log() ln() rand()
exp() abs() sqrt() pow(base,exponent)
The instructions to program
// For coments
speed= The horizontal speed.
speedh= The vertical speed.
ang= The horizontal angle.
wait= The wait interval.
reset The reset action.
autog The auto-go action.
autob The auto-back action.
For repetitive actions use do - enddo. See sample 5.
Auto-back to return to the initial position.
Auto-go to fly automatically.
Program:
Constants: pi and any int/floating number
Variables: u v
Operators: + - * / > < == & |
Functions: if(exp,exp1,exp2)
sin() cos() tan() asin() acos() atan()
sinh() cosh() tanh() log() ln() rand()
exp() abs() sqrt() pow(base,exponent)
The instructions to program
// For coments
speed= The horizontal speed.
speedh= The vertical speed.
ang= The horizontal angle.
wait= The wait interval.
reset The reset action.
autog The auto-go action.
autob The auto-back action.
For repetitive actions use do - enddo. See sample 5.
Date de mise à jour
La sécurité, c'est d'abord comprendre comment les développeurs collectent et partagent vos données. Les pratiques concernant leur confidentialité et leur protection peuvent varier selon votre utilisation, votre région et votre âge. Le développeur a fourni ces informations et peut les modifier ultérieurement.

Aucune donnée partagée avec des tiers
En savoir plus sur la manière dont les développeurs déclarent le partage

Aucune donnée collectée
En savoir plus sur la manière dont les développeurs déclarent la collecte
Nouveautés
2.2 Android U
1.8 Use of random function
1.7 Error detector
1.6 Drone coordinates
1.5 More Samples
1.4 Program
1.3 Android S
1.8 Use of random function
1.7 Error detector
1.6 Drone coordinates
1.5 More Samples
1.4 Program
1.3 Android S
Assistance de l'appli
À propos du développeur
Leopoldo Rodriguez Cabañas
leorodwm@gmail.com
Spain
undefined





