
AntiCollision

१० ह+
डाउनलोड

प्रत्येकजण
info







या अॅपविषयी
कृपया चांगल्या वापरकर्त्याचा अनुभव सुनिश्चित करण्यासाठी जेव्हा नवीन आवृत्ती प्रकाशित होईल तेव्हा अद्यतनित करा. अद्यतनित करताना प्रथम अॅप डेटा मिटविणे (किंवा जे अधिक सोयीचे असेल ते अॅप विस्थापित करणे) चांगले आहे आणि नंतर नवीन आवृत्ती डाउनलोड करा.
अँटीकॉलिझन हे अचूक रीअल-टाइम जहाज वर्तन असलेले एक जहाज सिम्युलेटर आहे, ज्यामध्ये रडार / एआरपीए सिम्युलेटर आहे जे आपल्याला आपल्या स्वत: च्या जहाजाच्या प्रभारी बनू देते आणि कोणत्याही जहाजाशी टक्कर टाळण्यासाठी आवश्यक ते करू देते.
कनिष्ठ डेक अधिका for्यांसाठी हे एक उत्तम साधन आहे जे त्यांच्या परीक्षेची तयारी करीत आहेत आणि इतर जहाजांसह जवळच्या तिमाहीच्या परिस्थितीत टाळण्याच्या अनुभवावर हात ठेवू इच्छित आहेत.
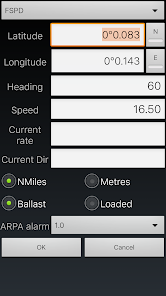
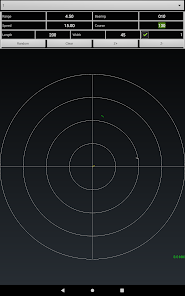
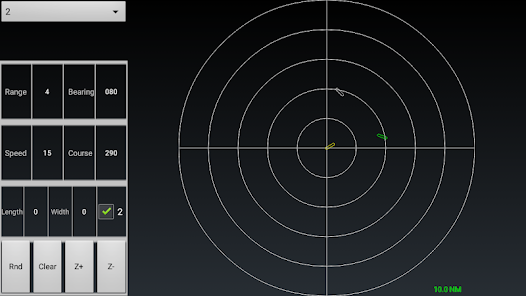
एआरपीए सिम्युलेटर आपल्याला जास्तीत जास्त 6 लक्ष्ये सक्रिय करू देते ज्यासाठी आपण वैयक्तिक श्रेणी, पत्करणे, अभ्यासक्रम आणि वेग निवडू शकता.
आपण अॅपला यादृच्छिक पॅरामीटर्ससह ही लक्ष्ये सेट करू देणे देखील निवडू शकता.
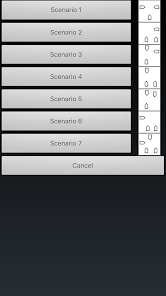
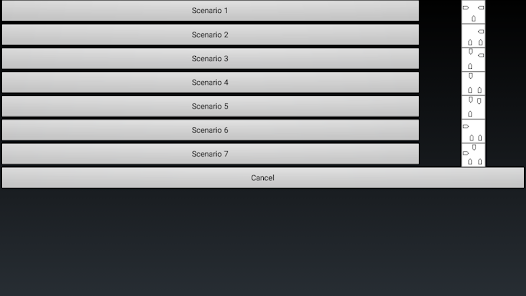
अनुप्रयोगामध्ये एआरपीए परिस्थिती निवडकर्ता देखील आहे: निवडण्यासाठी 7 पूर्व-परिभाषित परिस्थिती आहेत. जेव्हा आपण यापैकी एखादी निवडता तेव्हा लक्ष्य जहाज आपली स्वयंचलित जहाज जवळच्या तिमाही परिस्थितीत ठेवलेल्या परिस्थितींमध्ये स्वयंचलितपणे सेट होते. त्यानंतर आपले जहाज सुरक्षित स्थितीत परत ठेवण्यासाठी आपण काय करावे हे ठरवावे लागेल.
मुख्य इंजिनवर आपले नियंत्रण आहे आणि आपण स्वयं पायलट किंवा मॅन्युअल स्टीयरिंग वापरू शकता.
जहाज मॉडेल एक व्हीएलसीसी आहे, जे आपण पूर्णपणे लोड किंवा गिट्टीमध्ये निवडू शकता.
आपण 6 जहाजांसाठी एआरपीए युनिटमध्ये प्रविष्ट केलेला कोणताही लक्ष्य डेटा अॅपमध्ये सेव्ह झाला आहे आणि पुढच्या वेळी अॅप उघडल्यावर उपलब्ध होईल.
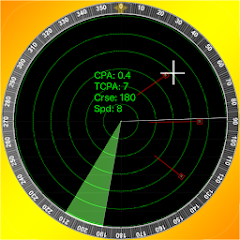
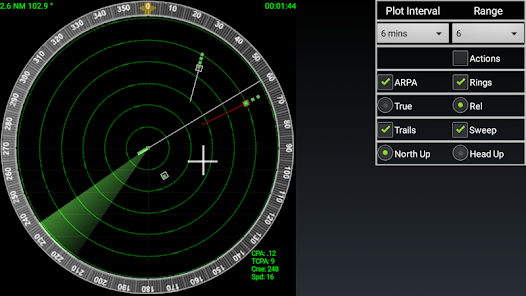
रेडार व्ह्यू स्क्रीनवरील सर्व लक्ष्य दर्शवितो, एकतर सापेक्ष किंवा खरा हालचाली मध्ये, आणि कर्सरचा वापर करून आपण सीपीए, टीसीपीए, अभ्यासक्रम आणि प्रत्येक लक्ष्यासाठी वेग याबद्दल माहिती मिळवू शकतो.
कर्सर आपण निवडलेल्या कोणत्याही लक्ष्याची श्रेणी आणि असर देखील दर्शवितो.
रेडारकडे देखील खुणा दर्शविण्याचा एक पर्याय आहे, ज्यामुळे आपण आपल्या स्वत: च्या जहाज आणि लक्ष्य दोन्हीचे मागील ट्रॅक पाहू शकता.
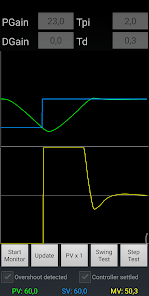
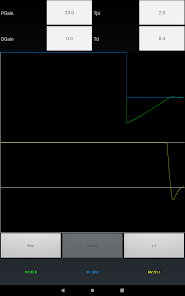
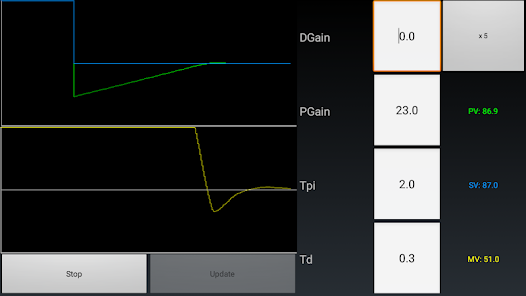
शिप युक्तीकरण: अॅपमध्ये रिअल टाइम अचूक युक्ती चालविणारे मॉडेल असते जे वास्तविक जहाजच्या वर्तनाचे अचूकपणे अनुकरण करते. ऑटो पायलट युनिट सानुकूल आहे; आपण सुकाणू वर्तन बदलण्यासाठी त्याचे मापदंड समायोजित करू शकता आणि ग्राफमध्ये वर्तन प्लॉट करू शकता.
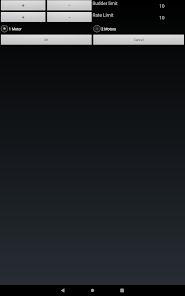
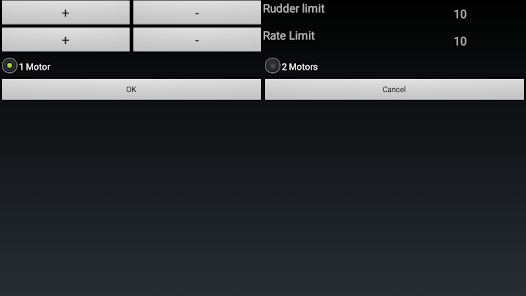
रडर: आपण एक किंवा दोन स्टीयरिंग मोटर्स वापरू इच्छित असाल तर आपण निवडू शकता आणि आपण रडर मर्यादा आणि वळणाची मर्यादा (ऑटो पायलट मोडमध्ये असताना) सेट करू शकता.
ट्यूटोरियलसाठी आमचा ब्लॉग तपासा: मूरिंगमारिनइकॉन्स्लन्टी.वर्डवर्डप्रेस.कॉम
अँटीकॉलिझन हे अचूक रीअल-टाइम जहाज वर्तन असलेले एक जहाज सिम्युलेटर आहे, ज्यामध्ये रडार / एआरपीए सिम्युलेटर आहे जे आपल्याला आपल्या स्वत: च्या जहाजाच्या प्रभारी बनू देते आणि कोणत्याही जहाजाशी टक्कर टाळण्यासाठी आवश्यक ते करू देते.
कनिष्ठ डेक अधिका for्यांसाठी हे एक उत्तम साधन आहे जे त्यांच्या परीक्षेची तयारी करीत आहेत आणि इतर जहाजांसह जवळच्या तिमाहीच्या परिस्थितीत टाळण्याच्या अनुभवावर हात ठेवू इच्छित आहेत.
एआरपीए सिम्युलेटर आपल्याला जास्तीत जास्त 6 लक्ष्ये सक्रिय करू देते ज्यासाठी आपण वैयक्तिक श्रेणी, पत्करणे, अभ्यासक्रम आणि वेग निवडू शकता.
आपण अॅपला यादृच्छिक पॅरामीटर्ससह ही लक्ष्ये सेट करू देणे देखील निवडू शकता.
अनुप्रयोगामध्ये एआरपीए परिस्थिती निवडकर्ता देखील आहे: निवडण्यासाठी 7 पूर्व-परिभाषित परिस्थिती आहेत. जेव्हा आपण यापैकी एखादी निवडता तेव्हा लक्ष्य जहाज आपली स्वयंचलित जहाज जवळच्या तिमाही परिस्थितीत ठेवलेल्या परिस्थितींमध्ये स्वयंचलितपणे सेट होते. त्यानंतर आपले जहाज सुरक्षित स्थितीत परत ठेवण्यासाठी आपण काय करावे हे ठरवावे लागेल.
मुख्य इंजिनवर आपले नियंत्रण आहे आणि आपण स्वयं पायलट किंवा मॅन्युअल स्टीयरिंग वापरू शकता.
जहाज मॉडेल एक व्हीएलसीसी आहे, जे आपण पूर्णपणे लोड किंवा गिट्टीमध्ये निवडू शकता.
आपण 6 जहाजांसाठी एआरपीए युनिटमध्ये प्रविष्ट केलेला कोणताही लक्ष्य डेटा अॅपमध्ये सेव्ह झाला आहे आणि पुढच्या वेळी अॅप उघडल्यावर उपलब्ध होईल.
रेडार व्ह्यू स्क्रीनवरील सर्व लक्ष्य दर्शवितो, एकतर सापेक्ष किंवा खरा हालचाली मध्ये, आणि कर्सरचा वापर करून आपण सीपीए, टीसीपीए, अभ्यासक्रम आणि प्रत्येक लक्ष्यासाठी वेग याबद्दल माहिती मिळवू शकतो.
कर्सर आपण निवडलेल्या कोणत्याही लक्ष्याची श्रेणी आणि असर देखील दर्शवितो.
रेडारकडे देखील खुणा दर्शविण्याचा एक पर्याय आहे, ज्यामुळे आपण आपल्या स्वत: च्या जहाज आणि लक्ष्य दोन्हीचे मागील ट्रॅक पाहू शकता.
शिप युक्तीकरण: अॅपमध्ये रिअल टाइम अचूक युक्ती चालविणारे मॉडेल असते जे वास्तविक जहाजच्या वर्तनाचे अचूकपणे अनुकरण करते. ऑटो पायलट युनिट सानुकूल आहे; आपण सुकाणू वर्तन बदलण्यासाठी त्याचे मापदंड समायोजित करू शकता आणि ग्राफमध्ये वर्तन प्लॉट करू शकता.
रडर: आपण एक किंवा दोन स्टीयरिंग मोटर्स वापरू इच्छित असाल तर आपण निवडू शकता आणि आपण रडर मर्यादा आणि वळणाची मर्यादा (ऑटो पायलट मोडमध्ये असताना) सेट करू शकता.
ट्यूटोरियलसाठी आमचा ब्लॉग तपासा: मूरिंगमारिनइकॉन्स्लन्टी.वर्डवर्डप्रेस.कॉम
या रोजी अपडेट केले
डेव्हलपर तुमचा डेटा कसा गोळा करतात आणि शेअर करतात हे समजून घेण्यापासून सुरक्षितता सुरू होते. तुमचा वापर, प्रदेश आणि वय यांच्या आधारे डेटा गोपनीयता व सुरक्षेशी संबंधित पद्धती बदलू शकतात. डेव्हलपरने ही माहिती पुरवली आहे आणि ती कालांतराने अपडेट केली जाऊ शकते.

तृतीय पक्षांसोबत कोणताही डेटा शेअर केलेला नाही
डेव्हलपर शेअर करण्याविषयी माहिती कशी घोषित करतात याविषयी अधिक जाणून घ्या

कोणताही डेटा गोळा केलेला नाही
डेव्हलपर डेटा गोळा करण्याविषयी माहिती कशी घोषित करतात याविषयी अधिक जाणून घ्या
नवीन काय आहे
Updated to Android 15, various bug fixes and performance improvements
ॲप सपोर्ट
डेव्हलपर याविषयी
MARIA SUZETTE COSTA MOORING
mmc.mooring@gmail.com
4617 IRIS STREET SUNVALLEY SUBDIVISION
PARANAQUE CITY
1700 Metro Manila
Philippines
undefined











