
Quadcopter FX Simulator
အက်ပ်အတွင်း ဝယ်ယူမှုများ

၃.၉star
သုံးသပ်ချက် ၂.၃၅ သောင်း
၁ သန်း+
ဒေါင်းလုဒ်များ

အားလုံး
info








ဤဂိမ်းအကြောင်း
ပထမဦးစွာပုဂ္ဂိုလ်မြင်ကွင်းတခု (FPV), HUD, သို့ပြန်သွားသည်မူလစာမျက်နှာ, သင်တန်း Lock ကို, ပြည်ထဲရေး Lock ကို, ကင်မရာ Gimbal, acro mode ကို, acro 3D mode နဲ့ပိုပြီးနှင့်အတူတစ် Quadcopter / Multirotor RC မောင်းသူမဲ့လေယာဉ် simulator ကို ..
Google Now ကိုကတ်ထူပြား VR စစွဲငြိဖွယ်ပျံနှင့် FPV အတွေ့အကြုံထောက်ခံသည်။
ထိန်းချုပ်ရေးပံ့ပိုးမှု
ဒီ simulator ကိုနှင့်မကစားကို ကျေးဇူးပြု. သတိပြုပါ။ ဒါဟာ Flying ကျွမ်းကျင်မှုလေ့ကျင့် RC နိူးသည်ဒီဇိုင်းပြုလုပ်ထားသည်။
အစပြုသူသည်အခြေခံပညာပုံများအထက်ပါဖော်ပြချက်ဗီဒီယိုမှာဖြစ်ပါတယ်။
လိုအပ်သည့်အနိမ့် Screen က resolution ကို 800 x 480 px ဖြစ်ပါတယ်။ နိမ့်ဆုံးအကြံပြု RAM ကို 1 GB အထိဖြစ်ပါတယ်။ ကျနော်တို့အကြံပြုချက်နှင့်ပြဿနာများမှပွင့်လင်းကြ၏။ သင်တို့၌အစဉ်ကျွန်တော်တို့ရဲ့ထောက်ခံမှုအီးမေးလ်ကိုအီးမေးလ်ပို့နိုင်ပါတယ်။
အင်္ဂါရပ်များ:
1) Quadcopter ၏စစ်မှန်သောရူပဗေဒ Model ကိုအပေါ်အခြေခံပြီး
ကွဲပြားခြားနားသောကင်မရာများ modes ၏ 2) Interactive မှရွေးချယ်ခြင်း:
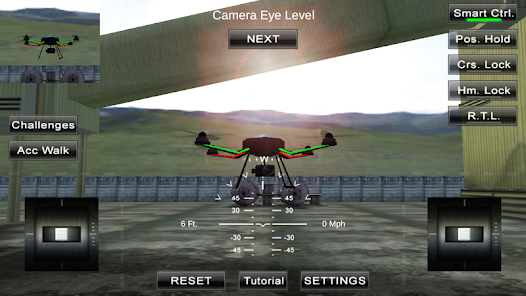
* မျက်စိအဆင့်ကင်မရာ
* ပထမဦးစွာပုဂ္ဂိုလ်ကြည့်ရန်ကင်မရာ
* မွဲ Gimbal ကင်မရာ
* Follow ကင်မရာ
screen ၏အလယ်ဆွဲအားဖြင့်ဖြစ်စေ, မျက်စိအဆင့်ကင်မရာ Mode တွင်လက်ဝဲဘက်မှာ accelerometer button ကို enable လုပ်ထားခြင်းဖြင့်လည်းကောင်းထို quad ကြည့်, ပျံသန်းနေစဉ်သင့်ပတ်လည်လမ်းလျှောက်နိုင်ပါတယ် ..
တည်နေရာမှ 3) သို့ပြန်သွားသည် (RTL)
အခါကို Quad အပေါ်အလိုအလျှောက်ပြန်လည်၎င်း၏နေကြတဲ့ရာထူးအတွက်ပြန်သွားသည်နှင့်မြေကြလိမ့်မည်။ ဒါဟာအလိုအလျောက်ကိုကို Quad အကွာအဝေး၏ထွက်ဝင်သည့်အခါအပေါ်ကိုပြောင်းပါလိမ့်မယ်။
4) ရာထူး Hold
အခါကို Quad ON နှစ်ခုလုံးကိုထိန်းချုပ်တုတ်ပြန်လွတ်လာကြသောအခါ၎င်း၏အနေအထားကိုင်ထားနိုင်ဖို့ကြိုးစားပါလိမ့်မယ်။
5) သင်တန်း Lock ကို
အခါ Forward ON, နောက်သို့ဆုတ်, လက်ဝဲနှင့်ညာမခွဲခြားဘဲကို Quad ၏ orientation ၏အတူတူပဲဖြစ်နေပါလိမ့်မယ်။ ဥပမာ Forward ညာဘက်တုတ် Moving အမြဲတမ်းကို Quad ၎င်း၏မြောက်ဘက်သို့ဦးတည်ထောက်ပြလျှင်ပင်အရှေ့ Direction အဖွဲ့အတွက်ရှေ့ဆက်သွားစေပါလိမ့်မယ်။
6) မူလစာမျက်နှာ Lock ကို
အခါ Forward ON အမြဲ Away သင့်ထံမှရလိမ့်မည်ဆုတ်အမြဲမခွဲခြားဘဲ quad အရှေ့တိုင်းဆန်သင်ဦးတည်ရလိမ့်မည်။
7) Display (HUD) တက်အကြီးအကဲလည်းဖြစ်
Real-time စေး, Roll, ဦးခေါင်း, အမြင့်နဲ့မြန်နှုန်း Displaying ။
8) Adjustments ထိန်းချုပ်ရေး sensitivity ကို Settings ကို
9) အော်တိုချိန်ညှိတည်ငြိမ်
10) အမြင့် Hold Switch
ထို quad ON အကယ်. ထိုသို့ပြောင်းလဲခဲ့သောအခါအမြင့်ထိန်းသိမ်းရန်ကြိုးစားပါလိမ့်မယ်။
11) အဆင့်မြင့် Settings ကို
enabled သုံးစွဲသူများက PID setting ကိုနှင့်ပျံသန်းဖိဆွဲပါတန်ဖိုးများစုစုပေါင်းအလေးချိန်, Static / Dynamic thrust ကိုပြောင်းလဲနိုင်မယ်ဆိုရင်။
12) အကွိမျမြားစှာကို Quad / ရှုခင်းရွေးချယ်ရေး / အချိန် Pass အချို့သောအခြေခံစိန်ခေါ်မှုများ ..
13) အကွိမျမြားစှာ mode ကို Input ကိုထောက်ပံ့ပေးတာဖြစ်ပါတယ်။
အခုတော့ mode1, mode2 ထောက်ခံပါတယ်။ mode4 နှင့် Accelerometer mode3 ။ သင်ဟာ settings စာမျက်နှာကနေတဆင့်ပြောင်းနိုင်ပါတယ်
FPV နှင့် Gimbal ကင်မရာ 14) ကင်မရာလည်ပတ်။
Click နှင့် FPV သို့မဟုတ် Gimbal ကင်မရာကိုအပေါ်မျက်နှာပြင်၏အလယ်ဗဟိုကနေဆွဲချပါ။ reset မှအလယ်ဗဟိုရှိကိုနှစ်ချက်နှိပ်ပါ။
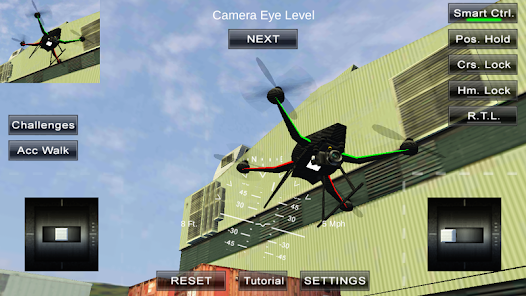
15) Dynamic Wind
အခါအဆောက်အဦနောက်ကွယ်မှလေတိုက်အကျိုးသက်ရောက်မှုကိုလျော့ချလိမ့်မည်။
16) စွဲငြိဖွယ် virtual reality နှင့် FPV အတွေ့အကြုံ Google ကကတ်ထူထောက်ပံ့ပေးတာဖြစ်ပါတယ်။
အဆိုပါကတ်ထူ VR enable လုပ်ထားတစ်ချိန်ကသင် quadcopter ထိန်းချုပ်နိုင်သည့်တစ်ခုတည်းသောလမ်း Controller ကိုအသုံးပြုဖြစ်သောကြောင့်သင်ဖုန်းကိုတွဲတစ် Controller ကိုရှိသည်ကိုသေချာပါစေ။ ကို enable လုပ်ထားခြင်းပြီးနောက်သင် UI ကိုအပေါ်ခလုတ်မှာစေ့စေ့ကြည့်ရှုခြင်းနှင့်နှိပ်လိုက်ပါရန်ကတ်ထူပြားပေါ်မှာမောင်းခလုတ်ကိုနှိပ်ဖို့ရှိသည်။ သင်ပျံသန်းကြသည်နှင့်တပြိုင်နက်ပြီးတော့ဘယ်နေရာမှာမဆိုမောင်းကိုနှိပ် setting ကိုစာမျက်နှာကိုဖွင်လိမ့်မည်။ ကိုလည်းသင်မောင်းခလုတ်ကိုနှိပ်အစားခလုတ်ဖြစ်ရပ် execute မှဘယ်နေရာမှာမဆို screen ပေါ်မှာမထိနိုင်။
17) မက်စ tilt Angle / မော်တော်ကားအာရုံ Slider တည်ငြိမ်
'Normal Mode ကိုခုနှစ်တွင် slider ကိုအများဆုံး tilt ထောင့် setting ကိုပြောင်းလဲလိုက်တယ်။ ဒါဟာ setting ကိုကို quadcopter စောင်းလိမ့်မည်အမြင့်ဆုံးလိပ် / အစေးထောင့်ဆုံးဖြတ်သည်။ အားကစား Mode ကိုခုနှစ်တွင်ကြောင့်မော်တော်ကား sensitivity ကိုတည်ငြိမ်ပြောင်းလဲလိုက်တယ်။ မြင့်မား setting များကို ပို. အင်အားကို quadcopter တည်ငြိမ်မှလျှောက်ထားတာဖြစ်ပါတယ်။
18) ကျွမ်းကျင်သူပျံသည် acro / acro 3d mode ကို
ထိုအ modes အတွက်လျှောက်ထားလိမ့်မည်မဟုတ်ပါ auto တည်ငြိမ်။ သင်သည်ဤ mode.In 3D Mode ကိုအတွက်ပျံသန်းဖို့ကျွမ်းကျင်သူဖြစ်လို Quadcopter ကိုလည်းဇောက်ထိုးပျံသန်းနိုင်သည့်အတွက် mode ကိုဖြစ်ပါတယ်။ ဗဟိုရာထူးမှဆင်းပြောင်းရွှေ့လာသောအခါအခိုးအငှေ့ညှိရာကိရိယာတုတ်ပြောင်းပြန် thrust ထုတ်လုပ်သွားမည်ဖြစ်သည်။
ပျံခံစားကြည့်ပါ ..
ခရက်ဒစ်: တချို့က Arteria အကြောင်းအရာတွေအသုံးပြုနေပါတယ်။
Google Now ကိုကတ်ထူပြား VR စစွဲငြိဖွယ်ပျံနှင့် FPV အတွေ့အကြုံထောက်ခံသည်။
ထိန်းချုပ်ရေးပံ့ပိုးမှု
ဒီ simulator ကိုနှင့်မကစားကို ကျေးဇူးပြု. သတိပြုပါ။ ဒါဟာ Flying ကျွမ်းကျင်မှုလေ့ကျင့် RC နိူးသည်ဒီဇိုင်းပြုလုပ်ထားသည်။
အစပြုသူသည်အခြေခံပညာပုံများအထက်ပါဖော်ပြချက်ဗီဒီယိုမှာဖြစ်ပါတယ်။
လိုအပ်သည့်အနိမ့် Screen က resolution ကို 800 x 480 px ဖြစ်ပါတယ်။ နိမ့်ဆုံးအကြံပြု RAM ကို 1 GB အထိဖြစ်ပါတယ်။ ကျနော်တို့အကြံပြုချက်နှင့်ပြဿနာများမှပွင့်လင်းကြ၏။ သင်တို့၌အစဉ်ကျွန်တော်တို့ရဲ့ထောက်ခံမှုအီးမေးလ်ကိုအီးမေးလ်ပို့နိုင်ပါတယ်။
အင်္ဂါရပ်များ:
1) Quadcopter ၏စစ်မှန်သောရူပဗေဒ Model ကိုအပေါ်အခြေခံပြီး
ကွဲပြားခြားနားသောကင်မရာများ modes ၏ 2) Interactive မှရွေးချယ်ခြင်း:
* မျက်စိအဆင့်ကင်မရာ
* ပထမဦးစွာပုဂ္ဂိုလ်ကြည့်ရန်ကင်မရာ
* မွဲ Gimbal ကင်မရာ
* Follow ကင်မရာ
screen ၏အလယ်ဆွဲအားဖြင့်ဖြစ်စေ, မျက်စိအဆင့်ကင်မရာ Mode တွင်လက်ဝဲဘက်မှာ accelerometer button ကို enable လုပ်ထားခြင်းဖြင့်လည်းကောင်းထို quad ကြည့်, ပျံသန်းနေစဉ်သင့်ပတ်လည်လမ်းလျှောက်နိုင်ပါတယ် ..
တည်နေရာမှ 3) သို့ပြန်သွားသည် (RTL)
အခါကို Quad အပေါ်အလိုအလျှောက်ပြန်လည်၎င်း၏နေကြတဲ့ရာထူးအတွက်ပြန်သွားသည်နှင့်မြေကြလိမ့်မည်။ ဒါဟာအလိုအလျောက်ကိုကို Quad အကွာအဝေး၏ထွက်ဝင်သည့်အခါအပေါ်ကိုပြောင်းပါလိမ့်မယ်။
4) ရာထူး Hold
အခါကို Quad ON နှစ်ခုလုံးကိုထိန်းချုပ်တုတ်ပြန်လွတ်လာကြသောအခါ၎င်း၏အနေအထားကိုင်ထားနိုင်ဖို့ကြိုးစားပါလိမ့်မယ်။
5) သင်တန်း Lock ကို
အခါ Forward ON, နောက်သို့ဆုတ်, လက်ဝဲနှင့်ညာမခွဲခြားဘဲကို Quad ၏ orientation ၏အတူတူပဲဖြစ်နေပါလိမ့်မယ်။ ဥပမာ Forward ညာဘက်တုတ် Moving အမြဲတမ်းကို Quad ၎င်း၏မြောက်ဘက်သို့ဦးတည်ထောက်ပြလျှင်ပင်အရှေ့ Direction အဖွဲ့အတွက်ရှေ့ဆက်သွားစေပါလိမ့်မယ်။
6) မူလစာမျက်နှာ Lock ကို
အခါ Forward ON အမြဲ Away သင့်ထံမှရလိမ့်မည်ဆုတ်အမြဲမခွဲခြားဘဲ quad အရှေ့တိုင်းဆန်သင်ဦးတည်ရလိမ့်မည်။
7) Display (HUD) တက်အကြီးအကဲလည်းဖြစ်
Real-time စေး, Roll, ဦးခေါင်း, အမြင့်နဲ့မြန်နှုန်း Displaying ။
8) Adjustments ထိန်းချုပ်ရေး sensitivity ကို Settings ကို
9) အော်တိုချိန်ညှိတည်ငြိမ်
10) အမြင့် Hold Switch
ထို quad ON အကယ်. ထိုသို့ပြောင်းလဲခဲ့သောအခါအမြင့်ထိန်းသိမ်းရန်ကြိုးစားပါလိမ့်မယ်။
11) အဆင့်မြင့် Settings ကို
enabled သုံးစွဲသူများက PID setting ကိုနှင့်ပျံသန်းဖိဆွဲပါတန်ဖိုးများစုစုပေါင်းအလေးချိန်, Static / Dynamic thrust ကိုပြောင်းလဲနိုင်မယ်ဆိုရင်။
12) အကွိမျမြားစှာကို Quad / ရှုခင်းရွေးချယ်ရေး / အချိန် Pass အချို့သောအခြေခံစိန်ခေါ်မှုများ ..
13) အကွိမျမြားစှာ mode ကို Input ကိုထောက်ပံ့ပေးတာဖြစ်ပါတယ်။
အခုတော့ mode1, mode2 ထောက်ခံပါတယ်။ mode4 နှင့် Accelerometer mode3 ။ သင်ဟာ settings စာမျက်နှာကနေတဆင့်ပြောင်းနိုင်ပါတယ်
FPV နှင့် Gimbal ကင်မရာ 14) ကင်မရာလည်ပတ်။
Click နှင့် FPV သို့မဟုတ် Gimbal ကင်မရာကိုအပေါ်မျက်နှာပြင်၏အလယ်ဗဟိုကနေဆွဲချပါ။ reset မှအလယ်ဗဟိုရှိကိုနှစ်ချက်နှိပ်ပါ။
15) Dynamic Wind
အခါအဆောက်အဦနောက်ကွယ်မှလေတိုက်အကျိုးသက်ရောက်မှုကိုလျော့ချလိမ့်မည်။
16) စွဲငြိဖွယ် virtual reality နှင့် FPV အတွေ့အကြုံ Google ကကတ်ထူထောက်ပံ့ပေးတာဖြစ်ပါတယ်။
အဆိုပါကတ်ထူ VR enable လုပ်ထားတစ်ချိန်ကသင် quadcopter ထိန်းချုပ်နိုင်သည့်တစ်ခုတည်းသောလမ်း Controller ကိုအသုံးပြုဖြစ်သောကြောင့်သင်ဖုန်းကိုတွဲတစ် Controller ကိုရှိသည်ကိုသေချာပါစေ။ ကို enable လုပ်ထားခြင်းပြီးနောက်သင် UI ကိုအပေါ်ခလုတ်မှာစေ့စေ့ကြည့်ရှုခြင်းနှင့်နှိပ်လိုက်ပါရန်ကတ်ထူပြားပေါ်မှာမောင်းခလုတ်ကိုနှိပ်ဖို့ရှိသည်။ သင်ပျံသန်းကြသည်နှင့်တပြိုင်နက်ပြီးတော့ဘယ်နေရာမှာမဆိုမောင်းကိုနှိပ် setting ကိုစာမျက်နှာကိုဖွင်လိမ့်မည်။ ကိုလည်းသင်မောင်းခလုတ်ကိုနှိပ်အစားခလုတ်ဖြစ်ရပ် execute မှဘယ်နေရာမှာမဆို screen ပေါ်မှာမထိနိုင်။
17) မက်စ tilt Angle / မော်တော်ကားအာရုံ Slider တည်ငြိမ်
'Normal Mode ကိုခုနှစ်တွင် slider ကိုအများဆုံး tilt ထောင့် setting ကိုပြောင်းလဲလိုက်တယ်။ ဒါဟာ setting ကိုကို quadcopter စောင်းလိမ့်မည်အမြင့်ဆုံးလိပ် / အစေးထောင့်ဆုံးဖြတ်သည်။ အားကစား Mode ကိုခုနှစ်တွင်ကြောင့်မော်တော်ကား sensitivity ကိုတည်ငြိမ်ပြောင်းလဲလိုက်တယ်။ မြင့်မား setting များကို ပို. အင်အားကို quadcopter တည်ငြိမ်မှလျှောက်ထားတာဖြစ်ပါတယ်။
18) ကျွမ်းကျင်သူပျံသည် acro / acro 3d mode ကို
ထိုအ modes အတွက်လျှောက်ထားလိမ့်မည်မဟုတ်ပါ auto တည်ငြိမ်။ သင်သည်ဤ mode.In 3D Mode ကိုအတွက်ပျံသန်းဖို့ကျွမ်းကျင်သူဖြစ်လို Quadcopter ကိုလည်းဇောက်ထိုးပျံသန်းနိုင်သည့်အတွက် mode ကိုဖြစ်ပါတယ်။ ဗဟိုရာထူးမှဆင်းပြောင်းရွှေ့လာသောအခါအခိုးအငှေ့ညှိရာကိရိယာတုတ်ပြောင်းပြန် thrust ထုတ်လုပ်သွားမည်ဖြစ်သည်။
ပျံခံစားကြည့်ပါ ..
ခရက်ဒစ်: တချို့က Arteria အကြောင်းအရာတွေအသုံးပြုနေပါတယ်။
အပ်ဒိတ်လုပ်ခဲ့သည့်ရက်
ဆော့ဖ်ဝဲရေးသူများက သင့်ဒေတာအား စုစည်းပုံနှင့် မျှဝေပုံကို နားလည်ခြင်းမှစ၍ လုံခြုံမှု စတင်သည်။ ဒေတာလုံခြုံမှုနှင့် လုံခြုံရေးလုပ်ဆောင်မှုများသည် သင်၏အသုံးပြုမှု၊ ဒေသနှင့် အသက်အပေါ်မူတည်၍ ကွဲပြားနိုင်သည်။ ဆော့ဖ်ဝဲရေးသူက ဤအချက်အလက်ကို ပေးထားပြီး အချိန်နှင့်အမျှ ပြောင်းလဲနိုင်သည်။

မည်သည့်ဒေတာကိုမျှ ပြင်ပအဖွဲ့အစည်းများနှင့် မျှဝေခြင်းမရှိပါ
ဆော့ဖ်ဝဲရေးသူများ၏ မျှဝေမှုဆိုင်ရာ ဖော်ပြမှုကို ပိုမိုလေ့လာရန်

မည်သည့်ဒေတာကိုမျှ စုစည်းခြင်းမရှိပါ
ဆော့ဖ်ဝဲရေးသူများ၏ စုစည်းမှုဆိုင်ရာ ဖော်ပြမှုကို ပိုမိုလေ့လာရန်
အဆင့်သတ်မှတ်ခြင်း၊ သုံးသပ်ခြင်း
၃.၉
သုံးသပ်ချက် ၁.၉၇ သောင်း