
Quadcopter FX Simulator
इन-एप खरिदहरू

३.९star
२३.५ हजार समीक्षाहरू
१० लाख+
डाउनलोड गरिएका सामग्रीहरू

सबैजना
info








यो खेलका बारेमा
पहिलो व्यक्ति हेर्नुहोस् (FPV), HUD, घर, कोर्स लक, घर लक, क्यामेरा Gimbal, Acro मोड, Acro 3D मोड र अधिक संग एक Quadcopter / Multirotor आर सी मुफ्तकोर सिम्युलेटर ..
अब गुगल गत्ता VR पनि इमर्सिभ उडान र FPV अनुभव लागि समर्थित छ।
कंट्रोलर्स लागि समर्थन
कृपया याद गर्नुहोस् यो एक सिम्युलेटर र छैन एक खेल भनेर। यो उडान कौशल अभ्यास आर सी उत्साहीहरुसँग लागि डिजाइन गरिएको छ।
शुरुवात लागि मूल अभ्यास माथि वर्णन भिडियो छ।
आवश्यक न्यूनतम पर्दा संकल्प 800 x 480 पिक्सेल छ। न्यूनतम सिफारिस राम 1 जीबी छ। हामी सुझाव र समस्या खुला छन्। तपाईं सधैं हाम्रो समर्थन ईमेल हामीलाई इमेल गर्न सक्छन्।
विशेषताहरु:
1) Quadcopter को वास्तविक भौतिक मोडेल आधारित
विभिन्न क्यामेरा मोड को 2) पारस्परिक चयन:
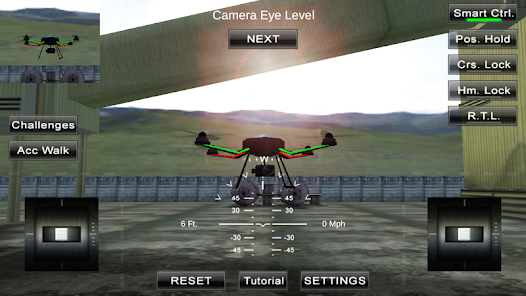
* आँखा स्तर क्यामेरा
* पहिलो व्यक्ति हेर्नुहोस् क्यामेरा
* अटल Gimbal क्यामेरा
* Follow क्यामेरा
स्क्रिनको बीचमा तानेर वा आँखा स्तर क्यामेरा मोड मा बाँया पक्षमा एक्सीलेरोमीटर बटन सक्षम द्वारा या त ट्रयाक्टर देख, उडान गर्दा तपाईं आसपास हिंड्न सक्छौं ..
स्थान गर्न 3) रिटर्न (RTL)
जब क्वाड स्वतः फर्कनुहोस् र भूमि फिर्ता यसको लैंडिंग स्थिति मा हुनेछ। यो स्वतः क्वाड दायरा बाहिर जान्छ जब मा स्विच हुनेछ।
4) स्थिति पकडो
जब क्वाड मा दुवै नियन्त्रण लाठी जारी गर्दा यसको स्थिति होल्ड गर्न प्रयास गर्नेछ।
5) कोर्स लक
जब फर्वार्ड मा, पछाडि, बायाँ र दायाँ जस्तोसुकै क्वाड उन्मुखीकरण को नै रहनेछ। उदाहरण सार्दै दायाँ छडी फर्वार्ड सधैं क्वाड यसको उत्तर तिर ईशारा पनि यदि पूर्व दिशा मा अगाडि जान बनाउन हुनेछ।
6) घर ताला
जब फर्वार्ड सधैं टाढा तिमी देखि हुनेछ र पिछडिएको सधैं जस्तोसुकै quads अभिमुखिकरण को तपाईं तिर हुनेछ।
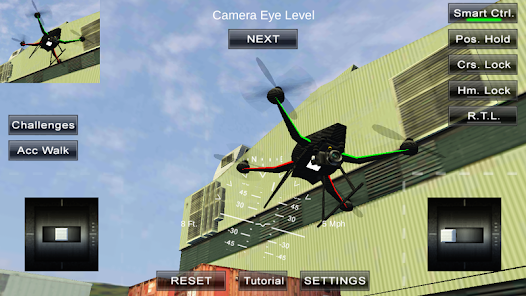
7) प्रदर्शन माथि Heads (HUD)
वास्तविक समय पिच, रोल, Heading, प्वाल र गति प्रदर्शित।
8) समायोज्य नियन्त्रण संवेदनशीलता सेटिङ
9) ओटो समायोज्य Stabilizing
10) प्वाल पकडो स्विच
यस ट्रयाक्टर मा भने यो सर्नु थियो जब ऊंचाई कायम गर्न प्रयास गर्नेछ।
11) विकसित सेटिङ
सक्षम प्रयोगकर्ताहरु लाई कुल वजन, स्थिर / गतिशील thrust, पीआईडी सेटिंग र aerodynamic तान्नुहोस् मान परिवर्तन गर्न सक्नुहुन्छ भने।
12) बहु क्वाड / दृश्य चयन / समय पारित लागि केही आधारभूत चुनौतीहरू ..
13) बहु मोड आगत समर्थन।
अब यो mode1, mode2 समर्थन। mode3, mode4 र accelerometers। तपाईं सेटिङहरू पृष्ठ मार्फत परिवर्तन गर्न सक्नुहुन्छ
FPV र Gimbal क्यामेरा मा 14) क्यामेरा परिक्रमा।
क्लिक गर्नुहोस् र FPV वा Gimbal क्यामेराको स्क्रिनमा को केन्द्र देखि तान्नुहोस्। केन्द्र मा डबल क्लिक रिसेट गर्न।
15) शेष पवन
जब भवन पछि हावा प्रभाव कम हुनेछ।
इमर्सिभ भर्चुअल वास्तविकता र FPV अनुभव लागि 16) गुगल गत्ता समर्थन।
गत्ता VR सक्षम छ एक पटक तपाईं quadcopter नियन्त्रण गर्न सक्नुहुन्छ मात्र तरिका नियन्त्रक हो किनभने तपाईं उपकरणमा संलग्न एक नियन्त्रक भन्ने निश्चित गर्नुहोस्। मिलाएपछि तपाईं युआई मा बटनको हेर्न र यो क्लिक गर्न गत्ता मा ट्रिगर बटन थिच्नुहोस् छ। तपाईं सेटिङहरू पृष्ठ खोल्न हुनेछ कहीं ट्रिगर थिचेर त्यसपछि उडान गर्दै एक पटक। तपाईं पनि ट्रिगर बटन थिचेर सट्टा ट्रिगर घटना कार्यान्वयन गर्न कहीं स्क्रिनमा स्पर्श गर्न सक्छन्।
17) अधिकतम झुकाव कोण / ओटो संवेदनशीलता स्लाइडर स्थिर
सामान्य मोड मा स्लाइडर अधिकतम झुकाव कोण सेटिंग परिवर्तन। यो सेटिङ्ग quadcopter झुकाव हुनेछ अधिकतम रोल / पिच कोण निर्धारण गर्छ। खेल मोड मा यो ओटो संवेदनशीलता स्थिर परिवर्तन। उच्च सेटिङहरू अधिक बल र quadcopter स्थिर लागू छ।
विशेषज्ञ उडान लागि 18) Acro / Acro 3 डी मोड
ओटो यी मोड मा लागू हुनेछैन स्थिर। तपाईं यस mode.In 3D मोड मा उड गर्न विशेषज्ञ हुन आवश्यक Quadcopter पनि तलमाथि उड सक्छ जो मोड छ। केन्द्र स्थिति देखि तल उत्प्रेरित जब भल्ब लाठी उत्पादन thrust उल्ट्याउन हुनेछ।
उडान आनंद ..
क्रेडिट: केही Arteria सामग्री प्रयोगमा छ।
अब गुगल गत्ता VR पनि इमर्सिभ उडान र FPV अनुभव लागि समर्थित छ।
कंट्रोलर्स लागि समर्थन
कृपया याद गर्नुहोस् यो एक सिम्युलेटर र छैन एक खेल भनेर। यो उडान कौशल अभ्यास आर सी उत्साहीहरुसँग लागि डिजाइन गरिएको छ।
शुरुवात लागि मूल अभ्यास माथि वर्णन भिडियो छ।
आवश्यक न्यूनतम पर्दा संकल्प 800 x 480 पिक्सेल छ। न्यूनतम सिफारिस राम 1 जीबी छ। हामी सुझाव र समस्या खुला छन्। तपाईं सधैं हाम्रो समर्थन ईमेल हामीलाई इमेल गर्न सक्छन्।
विशेषताहरु:
1) Quadcopter को वास्तविक भौतिक मोडेल आधारित
विभिन्न क्यामेरा मोड को 2) पारस्परिक चयन:
* आँखा स्तर क्यामेरा
* पहिलो व्यक्ति हेर्नुहोस् क्यामेरा
* अटल Gimbal क्यामेरा
* Follow क्यामेरा
स्क्रिनको बीचमा तानेर वा आँखा स्तर क्यामेरा मोड मा बाँया पक्षमा एक्सीलेरोमीटर बटन सक्षम द्वारा या त ट्रयाक्टर देख, उडान गर्दा तपाईं आसपास हिंड्न सक्छौं ..
स्थान गर्न 3) रिटर्न (RTL)
जब क्वाड स्वतः फर्कनुहोस् र भूमि फिर्ता यसको लैंडिंग स्थिति मा हुनेछ। यो स्वतः क्वाड दायरा बाहिर जान्छ जब मा स्विच हुनेछ।
4) स्थिति पकडो
जब क्वाड मा दुवै नियन्त्रण लाठी जारी गर्दा यसको स्थिति होल्ड गर्न प्रयास गर्नेछ।
5) कोर्स लक
जब फर्वार्ड मा, पछाडि, बायाँ र दायाँ जस्तोसुकै क्वाड उन्मुखीकरण को नै रहनेछ। उदाहरण सार्दै दायाँ छडी फर्वार्ड सधैं क्वाड यसको उत्तर तिर ईशारा पनि यदि पूर्व दिशा मा अगाडि जान बनाउन हुनेछ।
6) घर ताला
जब फर्वार्ड सधैं टाढा तिमी देखि हुनेछ र पिछडिएको सधैं जस्तोसुकै quads अभिमुखिकरण को तपाईं तिर हुनेछ।
7) प्रदर्शन माथि Heads (HUD)
वास्तविक समय पिच, रोल, Heading, प्वाल र गति प्रदर्शित।
8) समायोज्य नियन्त्रण संवेदनशीलता सेटिङ
9) ओटो समायोज्य Stabilizing
10) प्वाल पकडो स्विच
यस ट्रयाक्टर मा भने यो सर्नु थियो जब ऊंचाई कायम गर्न प्रयास गर्नेछ।
11) विकसित सेटिङ
सक्षम प्रयोगकर्ताहरु लाई कुल वजन, स्थिर / गतिशील thrust, पीआईडी सेटिंग र aerodynamic तान्नुहोस् मान परिवर्तन गर्न सक्नुहुन्छ भने।
12) बहु क्वाड / दृश्य चयन / समय पारित लागि केही आधारभूत चुनौतीहरू ..
13) बहु मोड आगत समर्थन।
अब यो mode1, mode2 समर्थन। mode3, mode4 र accelerometers। तपाईं सेटिङहरू पृष्ठ मार्फत परिवर्तन गर्न सक्नुहुन्छ
FPV र Gimbal क्यामेरा मा 14) क्यामेरा परिक्रमा।
क्लिक गर्नुहोस् र FPV वा Gimbal क्यामेराको स्क्रिनमा को केन्द्र देखि तान्नुहोस्। केन्द्र मा डबल क्लिक रिसेट गर्न।
15) शेष पवन
जब भवन पछि हावा प्रभाव कम हुनेछ।
इमर्सिभ भर्चुअल वास्तविकता र FPV अनुभव लागि 16) गुगल गत्ता समर्थन।
गत्ता VR सक्षम छ एक पटक तपाईं quadcopter नियन्त्रण गर्न सक्नुहुन्छ मात्र तरिका नियन्त्रक हो किनभने तपाईं उपकरणमा संलग्न एक नियन्त्रक भन्ने निश्चित गर्नुहोस्। मिलाएपछि तपाईं युआई मा बटनको हेर्न र यो क्लिक गर्न गत्ता मा ट्रिगर बटन थिच्नुहोस् छ। तपाईं सेटिङहरू पृष्ठ खोल्न हुनेछ कहीं ट्रिगर थिचेर त्यसपछि उडान गर्दै एक पटक। तपाईं पनि ट्रिगर बटन थिचेर सट्टा ट्रिगर घटना कार्यान्वयन गर्न कहीं स्क्रिनमा स्पर्श गर्न सक्छन्।
17) अधिकतम झुकाव कोण / ओटो संवेदनशीलता स्लाइडर स्थिर
सामान्य मोड मा स्लाइडर अधिकतम झुकाव कोण सेटिंग परिवर्तन। यो सेटिङ्ग quadcopter झुकाव हुनेछ अधिकतम रोल / पिच कोण निर्धारण गर्छ। खेल मोड मा यो ओटो संवेदनशीलता स्थिर परिवर्तन। उच्च सेटिङहरू अधिक बल र quadcopter स्थिर लागू छ।
विशेषज्ञ उडान लागि 18) Acro / Acro 3 डी मोड
ओटो यी मोड मा लागू हुनेछैन स्थिर। तपाईं यस mode.In 3D मोड मा उड गर्न विशेषज्ञ हुन आवश्यक Quadcopter पनि तलमाथि उड सक्छ जो मोड छ। केन्द्र स्थिति देखि तल उत्प्रेरित जब भल्ब लाठी उत्पादन thrust उल्ट्याउन हुनेछ।
उडान आनंद ..
क्रेडिट: केही Arteria सामग्री प्रयोगमा छ।
मा अपडेट गरिएको
तपाईंको डेटा सुरक्षित राख्नका निम्ति तपाईंले पहिला विकासकर्ताहरूले तपाईंको डेटा कसरी सङ्कलन तथा सेयर गर्छ भन्ने कुरा बुझ्न जरुरी छ। एपको प्रयोगसम्बन्धी जानकारी, तपाईं बसोबास गर्ने क्षेत्र र तपाईंको उमेरका आधारमा डेटाको गोपनीयता र सुरक्षासम्बन्धी अभ्यासहरू फरक हुन सक्छन्। यो एपका विकासकर्ताले यो जानकारी प्रदान गर्नुभएको हो र उहाँ समयक्रमसँगै यो जानकारी संशोधन गर्न सक्नुहुन्छ।

तेस्रो पक्षसँग कुनै पनि डेटा सेयर गरिँदैन
विकासकर्ताहरूले प्रयोगकर्ताको डेटा सेयर गरिने कुराका बारेमा कसरी जानकारी गराउँछन् भन्नेबारेमा थप जान्नुहोस्

कुनै पनि डेटा सङ्कलन गरिएको छैन
विकासकर्ताहरूले प्रयोगकर्ताको डेटा सङ्कलन गरिने कुराका बारेमा कसरी जानकारी गराउँछन् भन्नेबारेमा थप जान्नुहोस्
मूल्याङ्कन र समीक्षाहरू
३.९
१९.७ हजार समीक्षाहरू