
Robot Calibration by SprutCAM
100+
Descărcări

Toți
info








Despre aplicație
Calibrarea robotului funcționează cu MachineMaker 2.0
Aplicația pentru transferul automat de date despre poziția instrumentelor către MachineMaker 2.0.
Calibrarea robotului acceptă calibrarea TCP pentru următoarele tipuri de roboți:
- Fanuc
- Kuka
- Tormach
- Borunte
- CRP
- Denso
- Dobot
- Estun
- Bună
- Hyundai
- Motoman
- Newker
- Manutec
- Nachi
- OTC Daihen
- Torino
Cumfunctioneaza:
- Scanați codul QR în MachineMacker 2.0 pentru a conecta aplicația cu proiectul;
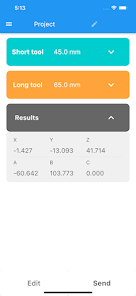
- Colectați datele TCP ale robotului. Mai întâi cu un instrument scurt, apoi cu unul lung;
- Introduceți citirea XYZ. Introduceți lungimea înălțimii sculelor de la ax în milimetri
Faceți clic pe „Calculați”
Aplicația pentru transferul automat de date despre poziția instrumentelor către MachineMaker 2.0.
Calibrarea robotului acceptă calibrarea TCP pentru următoarele tipuri de roboți:
- Fanuc
- Kuka
- Tormach
- Borunte
- CRP
- Denso
- Dobot
- Estun
- Bună
- Hyundai
- Motoman
- Newker
- Manutec
- Nachi
- OTC Daihen
- Torino
Cumfunctioneaza:
- Scanați codul QR în MachineMacker 2.0 pentru a conecta aplicația cu proiectul;
- Colectați datele TCP ale robotului. Mai întâi cu un instrument scurt, apoi cu unul lung;
- Introduceți citirea XYZ. Introduceți lungimea înălțimii sculelor de la ax în milimetri
Faceți clic pe „Calculați”
Ultima actualizare
Siguranța începe cu înțelegerea modului în care dezvoltatorii îți colectează și trimit datele. Practicile de securitate și confidențialitate a datelor pot varia în funcție de modul de utilizare, de regiune și de vârsta ta. Dezvoltatorul a oferit aceste informații și le poate actualiza în timp.

Nu sunt trimise date terțelor părți
Află mai multe despre cum declară dezvoltatorii trimiterea

Nu au fost colectate date
Află mai multe despre cum declară dezvoltatorii colectarea
Asistență pentru aplicație
Despre dezvoltator
SPRUTCAM TECH LIMITED
hazrat@sprutcam.io
9 Aiolou & Panagioti Diomidous
Limassol 3020
Cyprus
+357 97 620294