
Electrical Drives
Innehåller annonser
10 tn+
Nedladdningar

Ingen åldersgräns
info




Om appen
►Elektriska enheter är en integrerad del av industri- och automationsprocesser, speciellt där exakt kontroll av motorens varvtal är det främsta kravet. Dessutom har alla moderna elektriska tåg eller lokalsystem drivits av elektriska enheter. Robotics är ett annat stort område där frekvensomriktare med justerbar hastighet erbjuder exakt hastighet och positionskontroll
► En drivenhet styr och styr hastigheten, vridmomentet och riktningen för rörliga föremål. Drivar är vanligtvis anställda för hastighets- eller rörelsekontrollapplikationer, såsom verktygsmaskiner, transport, robotar, fläktar etc. De enheter som används för att styra elmotorer är kända som elektriska enheter.
►Drivna enheter kan vara av konstant eller variabel typ. Stationerna med konstant hastighet är ineffektiva för rörelser med variabel hastighet; I sådana fall används frekvensomriktare för att driva lasten vid något av ett brett utbud av hastigheter
►Drevna drivenheter är nödvändiga för exakt och kontinuerlig styrning av hastighet, läge eller vridmoment för olika belastningar. Tillsammans med denna stora funktion finns det många anledningar att använda justerbara hastighetsdrifter. Några av dessa inkluderar
➻ För att uppnå hög effektivitet: Elektriska enheter möjliggör användning av brett spänningsområde, från milliwatt till megawatt för olika hastigheter och därigenom reduceras den totala kostnaden för drift av systemet
➻ För att öka hastigheten på noggrannhet för motorns stopp eller reversering
➻ För att styra startströmmen
➻ Att ge skyddet
➻ Att skapa avancerad kontroll med variation av parametrar som temperatur, tryck, nivå etc.
【Ämnen som omfattas av denna app anges nedan】
⇢ DC Motor eller Direct Current Motor
⇢ Arbetsprincip för trefasinduktionsmotor
⇢ Synkronmotorns arbetsprincip
⇢ Elmotorkraftbedömning
⇢ Motor Duty Class och dess klassificering
⇢ Induktionsmotorbrems Regenerativ pluggning Dynamisk bromsning av induktionsmotor
⇢ Induktionsmotorstyrningar | Starta bromshastighetsreglering av induktionsmotorn
⇢ DC Motor Drives
⇢ Dynamik för elektriska enheter
⇢ Gränssnitt av Stepper Motor
⇢ Kontroll av elektriska enheter
⇢ Synkronmotordrivna enheter
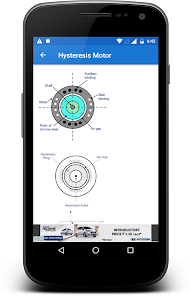
⇢ Hysteresis Motor
⇢ Stepper Motor Drive
⇢ Bipolär Stepper Motor
⇢ Vad är bromsning? Typ av bromsning | Regenerativ Plugging Dynamic Braking
⇢ Typer av bromsning i en likströmsmotor
⇢ Vad är servomotor?
⇢ Servomekanism | Teori och arbetsprincip för servomotor
⇢ Servo Motor Control
⇢ DC Servomotorer | Teori av DC servomotor
⇢ Servo Motor Controller eller Servo Motor Driver
⇢ Servo Motorapplikationer i Robotics Solar Tracking System etc
⇢ Variabel frekvensenhet eller VFD
⇢ Elektriska motorer
⇢ Magnetiska kretsar
⇢ Luftgapet
⇢ Momentproduktion
⇢ Särskilda belastningar och specifik produktion
⇢ Energikonvertering - Motional Emf
⇢ ekvivalent krets
⇢ Allmänna egenskaper för elmotorer
⇢ Power elektroniska omvandlare för motordrivna enheter
⇢ Spänningskontroll - D.C.-utgång från D.C. Supply
⇢ Chopper med induktiv last - överspänningsskydd
⇢ D.C. Från A.C. - Kontrollerad Rättelse
⇢ 3-fassstyrd omvandlare
⇢ A.C. Från D.C. SP - SP Inversion
⇢ Sinusformig PWM
⇢ Inverter Switching Devices
⇢ Kylning av strömbrytare
⇢ Konventionella D.C. Motors
⇢ Övergående beteende - Aktuella störningar
⇢ Shunt, Serie Och Sammansatta Motorer
⇢ Shuntmotor - Stabilitet i drift
⇢ Fjärrkvadrantdrift och regenerativ bromsning
⇢ Regenerativ reversering med full hastighet
⇢ Toy Motors
⇢ D.C. Motor Drives
⇢ Diskontinuerlig ström
⇢ Omformare med omriktare
⇢ Kontrollarrangemang för D.C.-enheter
⇢ Chopper-Fed D.C Motor Drives
⇢ D.C Servo Drives
⇢ Den verkliga transformatorn
⇢ Inverter-Fed Induction Motor Drives
► En drivenhet styr och styr hastigheten, vridmomentet och riktningen för rörliga föremål. Drivar är vanligtvis anställda för hastighets- eller rörelsekontrollapplikationer, såsom verktygsmaskiner, transport, robotar, fläktar etc. De enheter som används för att styra elmotorer är kända som elektriska enheter.
►Drivna enheter kan vara av konstant eller variabel typ. Stationerna med konstant hastighet är ineffektiva för rörelser med variabel hastighet; I sådana fall används frekvensomriktare för att driva lasten vid något av ett brett utbud av hastigheter
►Drevna drivenheter är nödvändiga för exakt och kontinuerlig styrning av hastighet, läge eller vridmoment för olika belastningar. Tillsammans med denna stora funktion finns det många anledningar att använda justerbara hastighetsdrifter. Några av dessa inkluderar
➻ För att uppnå hög effektivitet: Elektriska enheter möjliggör användning av brett spänningsområde, från milliwatt till megawatt för olika hastigheter och därigenom reduceras den totala kostnaden för drift av systemet
➻ För att öka hastigheten på noggrannhet för motorns stopp eller reversering
➻ För att styra startströmmen
➻ Att ge skyddet
➻ Att skapa avancerad kontroll med variation av parametrar som temperatur, tryck, nivå etc.
【Ämnen som omfattas av denna app anges nedan】
⇢ DC Motor eller Direct Current Motor
⇢ Arbetsprincip för trefasinduktionsmotor
⇢ Synkronmotorns arbetsprincip
⇢ Elmotorkraftbedömning
⇢ Motor Duty Class och dess klassificering
⇢ Induktionsmotorbrems Regenerativ pluggning Dynamisk bromsning av induktionsmotor
⇢ Induktionsmotorstyrningar | Starta bromshastighetsreglering av induktionsmotorn
⇢ DC Motor Drives
⇢ Dynamik för elektriska enheter
⇢ Gränssnitt av Stepper Motor
⇢ Kontroll av elektriska enheter
⇢ Synkronmotordrivna enheter
⇢ Hysteresis Motor
⇢ Stepper Motor Drive
⇢ Bipolär Stepper Motor
⇢ Vad är bromsning? Typ av bromsning | Regenerativ Plugging Dynamic Braking
⇢ Typer av bromsning i en likströmsmotor
⇢ Vad är servomotor?
⇢ Servomekanism | Teori och arbetsprincip för servomotor
⇢ Servo Motor Control
⇢ DC Servomotorer | Teori av DC servomotor
⇢ Servo Motor Controller eller Servo Motor Driver
⇢ Servo Motorapplikationer i Robotics Solar Tracking System etc
⇢ Variabel frekvensenhet eller VFD
⇢ Elektriska motorer
⇢ Magnetiska kretsar
⇢ Luftgapet
⇢ Momentproduktion
⇢ Särskilda belastningar och specifik produktion
⇢ Energikonvertering - Motional Emf
⇢ ekvivalent krets
⇢ Allmänna egenskaper för elmotorer
⇢ Power elektroniska omvandlare för motordrivna enheter
⇢ Spänningskontroll - D.C.-utgång från D.C. Supply
⇢ Chopper med induktiv last - överspänningsskydd
⇢ D.C. Från A.C. - Kontrollerad Rättelse
⇢ 3-fassstyrd omvandlare
⇢ A.C. Från D.C. SP - SP Inversion
⇢ Sinusformig PWM
⇢ Inverter Switching Devices
⇢ Kylning av strömbrytare
⇢ Konventionella D.C. Motors
⇢ Övergående beteende - Aktuella störningar
⇢ Shunt, Serie Och Sammansatta Motorer
⇢ Shuntmotor - Stabilitet i drift
⇢ Fjärrkvadrantdrift och regenerativ bromsning
⇢ Regenerativ reversering med full hastighet
⇢ Toy Motors
⇢ D.C. Motor Drives
⇢ Diskontinuerlig ström
⇢ Omformare med omriktare
⇢ Kontrollarrangemang för D.C.-enheter
⇢ Chopper-Fed D.C Motor Drives
⇢ D.C Servo Drives
⇢ Den verkliga transformatorn
⇢ Inverter-Fed Induction Motor Drives
Uppdaterades den
Säkerhet börjar med förståelsen av hur utvecklare samlar in och delar din data. Praxis för dataintegritet och säkerhet varierar beroende på användning, region och ålder. Utvecklaren har tillhandahållit denna information och kan uppdatera den med tiden.

Den här appen kan dela data av följande typ med tredje part
Enhetsidentifierare eller andra identifierare

Ingen data samlades in
Läs mer om hur utvecklare deklarerar insamling

Data krypteras när den skickas

Det går inte att radera datan
Nyheter
- More Topics Added
Appsupport
Om utvecklaren
Prabhu Thankaraju
vishwasparrow@gmail.com
101-B,Nishadham Bldg,1/5
Chipale,Panvel
NAVI MUMBAI, Maharashtra 410206
India





