
Survey Calculator Pro

4.4star
1ஆ கருத்துகள்
100ஆ+
பதிவிறக்கியவை

அனைவருக்குமானது
info





இந்த ஆப்ஸ் பற்றி
"நில அளவீட்டு கால்குலேட்டர்" என்பது களப்பணிக்காக வடிவமைக்கப்பட்ட இன்றியமையாத கணக்கீட்டு திட்டமாகும். அன்றாட ஆய்வுப் பணிகளுக்குத் தேவைப்படும் போக்குவரத்து பொறியியல் கணக்கெடுப்புக் கணக்கீடுகளின் பரவலான அளவை இது உள்ளடக்கியது. இந்த கால்குலேட்டரிலிருந்து பெறப்பட்ட முடிவுகளின் துல்லியம் எந்த தவறும் இல்லாமல் கவனமாக உள்ளீட்டைப் பொறுத்தது என்பதைக் கவனத்தில் கொள்ள வேண்டும். எனவே, எந்தவொரு திட்டத்தையும் தொடர்வதற்கு முன் மற்ற தளங்களில் முடிவுகளை இருமுறை சரிபார்க்க பரிந்துரைக்கிறோம்.
"சர்வே கால்குலேட்டர் ப்ரோ" (பல திட்டங்களை வழங்குகிறது:
1. தாங்கும் தொலைவு கால்குலேட்டர்: இந்த நிரல் செவ்வக ஆய <=> போலார் ஆயத்தை நேர்மாறாக கணக்கிடுகிறது. இது சர்வேயரின் அன்றாட அத்தியாவசிய COGO திட்டமாகும்.
2. குறுக்குவெட்டு புள்ளி கால்குலேட்டர்: குறுக்குவெட்டு நிரல் கொடுக்கப்பட்ட இரண்டு கோடுகளின் குறுக்குவெட்டு ஆயங்களை கணக்கிடுகிறது. நீங்கள் 4 புள்ளிகளின் ஆயங்களை அல்லது 2 புள்ளிகள் & 2 தாங்கு உருளைகளை உள்ளிடலாம்.
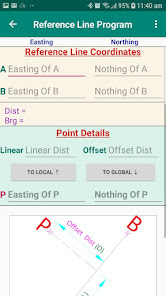
3. ரெஃபரன்ஸ் லைன் புரோகிராம் அல்லது லைன் மற்றும் ஆஃப்செட் புரோகிராம்: இந்த புரோகிராம் லோக்கல் லீனியர் & ஆஃப்செட் டிஸ்டன்ஸ் <=> குளோபல் ஈஸ்டிங் & நார்திங் ஆகியவற்றைக் கணக்கிடுகிறது. நில அளவையாளர்களுக்கு ஒவ்வொரு நாளும் அவசியமான COGO திட்டமாகும்.
4. முழு சாலை, பாலம் அல்லது ரயில்வே சீரமைப்புகளைக் கையாள்வதற்கான மிகச் சிறந்த அணுகுமுறை சிவில் 3D இல் முழுமையான சீரமைப்பை உருவாக்கி, LandXML கோப்பாக ஏற்றுமதி செய்து, பின்னர் அதை புலக் கணக்கீட்டு அமைப்பில் இறக்குமதி செய்வதாகும். இந்த நிரல் Civil 3D LandXML சீரமைப்புத் தரவை ஏற்றுக்கொள்கிறது மற்றும் லோக்கல் செயினேஜ் & ஆஃப்செட் <=> Global Easting & Northing ஆகியவற்றைக் கணக்கிடுகிறது. மேலும், இந்த நிரல் கொடுக்கப்பட்ட தொடக்க சங்கிலி மற்றும் வளைவுக்குள் ஒரு இடைவெளிக்கு பல முடிவுகளை கொடுக்க முடியும்.
5. 3 புள்ளி வட்டம் (அல்லது) வளைவு - 3 கொடுக்கப்பட்ட புள்ளிகள் வழியாக செல்லும் வளைவின் மையப் புள்ளி ஒருங்கிணைப்பு மற்றும் ஆரம் ஆகியவற்றை நிரல் கணக்கிடுகிறது.
6. Circular Curve Setting Out Calculator: Circular Curve setting out calculator program, வட்ட வளைவுக்குள் உள்ள புள்ளியின் ஒருங்கிணைப்பை கணக்கிடுகிறது. இந்தத் திட்டம் லோக்கல் செயினேஜ் & ஆஃப்செட் <=> குளோபல் ஈஸ்டிங் & நார்திங் ஆகியவற்றைக் கணக்கிடுகிறது. மேலும், இந்த நிரல் கொடுக்கப்பட்ட தொடக்க சங்கிலி மற்றும் வளைவுக்குள் ஒரு இடைவெளிக்கு பல முடிவுகளை கொடுக்க முடியும்.
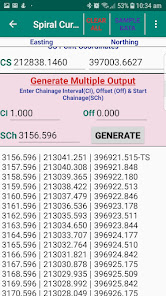
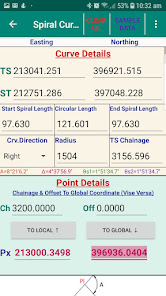
7. சுழல் வளைவு கால்குலேட்டரை அமைக்கிறது: கால்குலேட்டர் நிரலை அமைக்கும் சுழல் வளைவு, மாற்றம் அல்லது சுழல் மற்றும் வட்ட வளைவின் குழுவிற்குள் உள்ள புள்ளியின் ஒருங்கிணைப்பை கணக்கிடுகிறது. லோக்கல் செயினேஜ் & ஆஃப்செட் <=> குளோபல் ஈஸ்டிங் & நார்திங் நேர்மாறாக. மேலும், இந்த நிரல் கொடுக்கப்பட்ட தொடக்க சங்கிலி மற்றும் வளைவுக்குள் ஒரு இடைவெளிக்கு பல முடிவுகளை கொடுக்க முடியும்.
8. சுழல் பிரிவு: புதிதாக சேர்க்கப்பட்டது.
சுழல் வளைவின் தனிப்பயன் ஆரம் கொண்ட தொடக்க மற்றும் முடிவுடன் ஒரு புள்ளியின் ஒருங்கிணைப்பைக் கணக்கிட சுருள் பிரிவு நிரல் பயன்படுத்தப்படுகிறது. இந்த நிரல் கொடுக்கப்பட்ட தொடக்க சங்கிலி மற்றும் வளைவுக்குள் ஒரு இடைவெளிக்கு உள்ளூர் சங்கிலி மற்றும் ஆஃப்செட், மற்றும் உலகளாவிய கிழக்கு மற்றும் வடக்கு நேர்மாறாக கணக்கிடுகிறது.
9. செங்குத்து வளைவு செட்டிங் அவுட் கால்குலேட்டர்: இந்த செங்குத்து வளைவு நிரல் கொடுக்கப்பட்ட சங்கிலியில் பரவளைய தொடுகோடு ஆஃப்செட்டைக் கணக்கிடுகிறது. மேலும், இந்த நிரல் கொடுக்கப்பட்ட தொடக்க சங்கிலி மற்றும் வளைவுக்குள் ஒரு இடைவெளிக்கு பல முடிவுகளை கொடுக்க முடியும்.
10. 2டி டிரான்ஸ்ஃபர்மேஷன் கால்குலேட்டர்: இந்த புரோகிராம் வெவ்வேறு ஒருங்கிணைப்பு தோற்றம் மற்றும் நோக்குநிலை ஆகியவற்றுக்கு இடையேயான ஆயத்தொலைவுகளை மாற்றுகிறது. நில அளவையாளர்களுக்கு இது மிகவும் அவசியமான ஒவ்வொரு நாளும் தேவைப்படும் COGO திட்டமாகும்.
11. பகுதி மூலம் ஒருங்கிணைப்பு கால்குலேட்டர்: இந்த நிரல் கொடுக்கப்பட்ட XY ஆயத்தொலைவுகளுடன் எந்த பலகோணத்தின் பகுதியையும் கணக்கிடுகிறது.
12. லிங்க் டிராவர்ஸ் கணக்கீடு பௌடிச் விதி மூலம்: போடிச் விதியின் மூலம் டிராவர்ஸ் கணக்கீடு, போடிச் அல்லது திசைகாட்டி விதி மூலம் கோணப் பாதையைக் கணக்கிட்டு சரிசெய்யும் (25 அறியப்படாத STN அதிகபட்சம்). நீங்கள் சரியான நேரத்தில் தளத்தில் ஆங்கிள் டிராவர்ஸைச் செய்யும்போது, கோணம் குறுக்கு விவரங்களை உள்ளிடலாம் மற்றும் விரைவாக டிராவர்ஸ் லைன் துல்லிய விவரங்கள் மற்றும் இறுதியாக சரிசெய்யப்பட்ட ஆயங்களை பெறலாம். போடிச் விதி அல்லது திசைகாட்டி விதி என்பது டிராவர்ஸ் சரிசெய்தலின் மிகவும் பொதுவான முறையாகும்.
13. முக்கோணத்தால் ஒருங்கிணைத்தல்: இந்த நிரல் 2 அறியப்பட்ட குறிப்பு புள்ளிகளுடன் மூன்றாவது அறியப்படாத புள்ளி ஒருங்கிணைப்பையும், தெரியாத புள்ளியிலிருந்து தூரத்தையும் கணக்கிட உதவுகிறது.
14. லேட் லாங் - யுடிஎம் ஒருங்கிணைப்பு மாற்றி
"சர்வே கால்குலேட்டர் ப்ரோ" (பல திட்டங்களை வழங்குகிறது:
1. தாங்கும் தொலைவு கால்குலேட்டர்: இந்த நிரல் செவ்வக ஆய <=> போலார் ஆயத்தை நேர்மாறாக கணக்கிடுகிறது. இது சர்வேயரின் அன்றாட அத்தியாவசிய COGO திட்டமாகும்.
2. குறுக்குவெட்டு புள்ளி கால்குலேட்டர்: குறுக்குவெட்டு நிரல் கொடுக்கப்பட்ட இரண்டு கோடுகளின் குறுக்குவெட்டு ஆயங்களை கணக்கிடுகிறது. நீங்கள் 4 புள்ளிகளின் ஆயங்களை அல்லது 2 புள்ளிகள் & 2 தாங்கு உருளைகளை உள்ளிடலாம்.
3. ரெஃபரன்ஸ் லைன் புரோகிராம் அல்லது லைன் மற்றும் ஆஃப்செட் புரோகிராம்: இந்த புரோகிராம் லோக்கல் லீனியர் & ஆஃப்செட் டிஸ்டன்ஸ் <=> குளோபல் ஈஸ்டிங் & நார்திங் ஆகியவற்றைக் கணக்கிடுகிறது. நில அளவையாளர்களுக்கு ஒவ்வொரு நாளும் அவசியமான COGO திட்டமாகும்.
4. முழு சாலை, பாலம் அல்லது ரயில்வே சீரமைப்புகளைக் கையாள்வதற்கான மிகச் சிறந்த அணுகுமுறை சிவில் 3D இல் முழுமையான சீரமைப்பை உருவாக்கி, LandXML கோப்பாக ஏற்றுமதி செய்து, பின்னர் அதை புலக் கணக்கீட்டு அமைப்பில் இறக்குமதி செய்வதாகும். இந்த நிரல் Civil 3D LandXML சீரமைப்புத் தரவை ஏற்றுக்கொள்கிறது மற்றும் லோக்கல் செயினேஜ் & ஆஃப்செட் <=> Global Easting & Northing ஆகியவற்றைக் கணக்கிடுகிறது. மேலும், இந்த நிரல் கொடுக்கப்பட்ட தொடக்க சங்கிலி மற்றும் வளைவுக்குள் ஒரு இடைவெளிக்கு பல முடிவுகளை கொடுக்க முடியும்.
5. 3 புள்ளி வட்டம் (அல்லது) வளைவு - 3 கொடுக்கப்பட்ட புள்ளிகள் வழியாக செல்லும் வளைவின் மையப் புள்ளி ஒருங்கிணைப்பு மற்றும் ஆரம் ஆகியவற்றை நிரல் கணக்கிடுகிறது.
6. Circular Curve Setting Out Calculator: Circular Curve setting out calculator program, வட்ட வளைவுக்குள் உள்ள புள்ளியின் ஒருங்கிணைப்பை கணக்கிடுகிறது. இந்தத் திட்டம் லோக்கல் செயினேஜ் & ஆஃப்செட் <=> குளோபல் ஈஸ்டிங் & நார்திங் ஆகியவற்றைக் கணக்கிடுகிறது. மேலும், இந்த நிரல் கொடுக்கப்பட்ட தொடக்க சங்கிலி மற்றும் வளைவுக்குள் ஒரு இடைவெளிக்கு பல முடிவுகளை கொடுக்க முடியும்.
7. சுழல் வளைவு கால்குலேட்டரை அமைக்கிறது: கால்குலேட்டர் நிரலை அமைக்கும் சுழல் வளைவு, மாற்றம் அல்லது சுழல் மற்றும் வட்ட வளைவின் குழுவிற்குள் உள்ள புள்ளியின் ஒருங்கிணைப்பை கணக்கிடுகிறது. லோக்கல் செயினேஜ் & ஆஃப்செட் <=> குளோபல் ஈஸ்டிங் & நார்திங் நேர்மாறாக. மேலும், இந்த நிரல் கொடுக்கப்பட்ட தொடக்க சங்கிலி மற்றும் வளைவுக்குள் ஒரு இடைவெளிக்கு பல முடிவுகளை கொடுக்க முடியும்.
8. சுழல் பிரிவு: புதிதாக சேர்க்கப்பட்டது.
சுழல் வளைவின் தனிப்பயன் ஆரம் கொண்ட தொடக்க மற்றும் முடிவுடன் ஒரு புள்ளியின் ஒருங்கிணைப்பைக் கணக்கிட சுருள் பிரிவு நிரல் பயன்படுத்தப்படுகிறது. இந்த நிரல் கொடுக்கப்பட்ட தொடக்க சங்கிலி மற்றும் வளைவுக்குள் ஒரு இடைவெளிக்கு உள்ளூர் சங்கிலி மற்றும் ஆஃப்செட், மற்றும் உலகளாவிய கிழக்கு மற்றும் வடக்கு நேர்மாறாக கணக்கிடுகிறது.
9. செங்குத்து வளைவு செட்டிங் அவுட் கால்குலேட்டர்: இந்த செங்குத்து வளைவு நிரல் கொடுக்கப்பட்ட சங்கிலியில் பரவளைய தொடுகோடு ஆஃப்செட்டைக் கணக்கிடுகிறது. மேலும், இந்த நிரல் கொடுக்கப்பட்ட தொடக்க சங்கிலி மற்றும் வளைவுக்குள் ஒரு இடைவெளிக்கு பல முடிவுகளை கொடுக்க முடியும்.
10. 2டி டிரான்ஸ்ஃபர்மேஷன் கால்குலேட்டர்: இந்த புரோகிராம் வெவ்வேறு ஒருங்கிணைப்பு தோற்றம் மற்றும் நோக்குநிலை ஆகியவற்றுக்கு இடையேயான ஆயத்தொலைவுகளை மாற்றுகிறது. நில அளவையாளர்களுக்கு இது மிகவும் அவசியமான ஒவ்வொரு நாளும் தேவைப்படும் COGO திட்டமாகும்.
11. பகுதி மூலம் ஒருங்கிணைப்பு கால்குலேட்டர்: இந்த நிரல் கொடுக்கப்பட்ட XY ஆயத்தொலைவுகளுடன் எந்த பலகோணத்தின் பகுதியையும் கணக்கிடுகிறது.
12. லிங்க் டிராவர்ஸ் கணக்கீடு பௌடிச் விதி மூலம்: போடிச் விதியின் மூலம் டிராவர்ஸ் கணக்கீடு, போடிச் அல்லது திசைகாட்டி விதி மூலம் கோணப் பாதையைக் கணக்கிட்டு சரிசெய்யும் (25 அறியப்படாத STN அதிகபட்சம்). நீங்கள் சரியான நேரத்தில் தளத்தில் ஆங்கிள் டிராவர்ஸைச் செய்யும்போது, கோணம் குறுக்கு விவரங்களை உள்ளிடலாம் மற்றும் விரைவாக டிராவர்ஸ் லைன் துல்லிய விவரங்கள் மற்றும் இறுதியாக சரிசெய்யப்பட்ட ஆயங்களை பெறலாம். போடிச் விதி அல்லது திசைகாட்டி விதி என்பது டிராவர்ஸ் சரிசெய்தலின் மிகவும் பொதுவான முறையாகும்.
13. முக்கோணத்தால் ஒருங்கிணைத்தல்: இந்த நிரல் 2 அறியப்பட்ட குறிப்பு புள்ளிகளுடன் மூன்றாவது அறியப்படாத புள்ளி ஒருங்கிணைப்பையும், தெரியாத புள்ளியிலிருந்து தூரத்தையும் கணக்கிட உதவுகிறது.
14. லேட் லாங் - யுடிஎம் ஒருங்கிணைப்பு மாற்றி
புதுப்பிக்கப்பட்டது:
டெவெலப்பர்கள் உங்கள் தரவை எப்படிச் சேகரிக்கிறார்கள் பகிர்கிறார்கள் என்பதைப் புரிந்துகொள்வதிலிருந்தே 'பாதுகாப்பு' தொடங்குகிறது. உங்கள் உபயோகம், பிராந்தியம், வயது ஆகியவற்றின் அடிப்படையில் தரவுத் தனியுரிமை மற்றும் பாதுகாப்பு நடைமுறைகள் வேறுபடலாம். இந்தத் தகவலை டெவெலப்பர் வழங்கியுள்ளார். அவர் காலப்போக்கில் இதைப் புதுப்பிக்கக்கூடும்.

தரவு எதுவும் மூன்றாம் தரப்புடன் பகிரப்படாது
பகிர்தலை டெவெலப்பர்கள் எப்படி அறிவிக்கிறார்கள் என்பது குறித்து மேலும் அறிக

தரவு சேகரிக்கப்படாது
சேகரிப்பதை டெவெலப்பர்கள் எப்படி அறிவிக்கிறார்கள் என்பது குறித்து மேலும் அறிக
மதிப்பீடுகளும் மதிப்புரைகளும்
4.3
980 கருத்துகள்
புதிய அம்சங்கள்
Bug Fixes
ஆப்ஸ் உதவி
டெவெலப்பர் குறித்த தகவல்கள்
RAJASEKARAN THIAGARAJAN
t.rajasekaran@engineer.com
India





