
AndrDron
500+
డౌన్లోడ్లు

ప్రతి ఒక్కరు
info
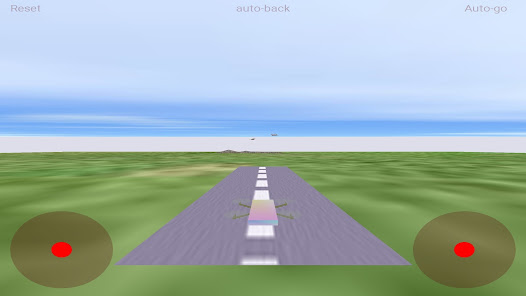

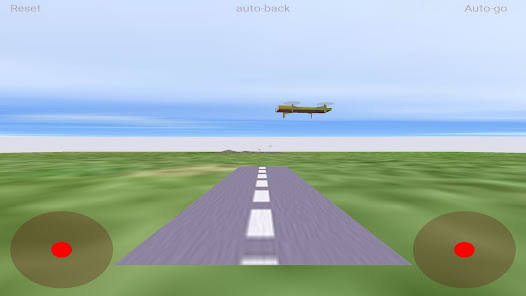
ఈ గేమ్ పరిచయం
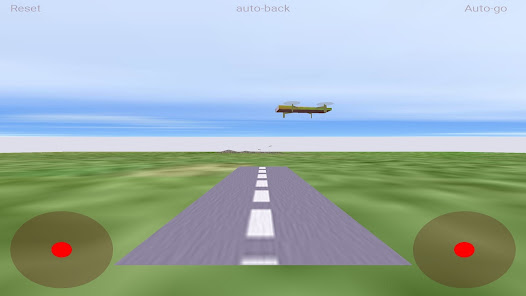
మీరు డ్రోన్ను వేగం, ఎత్తు మరియు భ్రమణంలో నిర్వహించవచ్చు.
ప్రారంభ స్థానానికి తిరిగి రావడానికి స్వయంచాలకంగా వెనుకకు.
స్వయంచాలకంగా ఎగరడానికి ఆటో-గో.
కార్యక్రమం:
స్థిరాంకాలు: pi మరియు ఏదైనా int/floating number
వేరియబుల్స్: u v
ఆపరేటర్లు: + - * / > < == & |
విధులు: if(exp,exp1,exp2)
sin() cos() tan() asin() acos() atan()
sinh() cosh() tanh() log() ln() rand()
exp() abs() sqrt() pow(base,exponent)
ప్రోగ్రామ్ కోసం సూచనలు
// వ్యాఖ్యల కోసం
వేగం = క్షితిజ సమాంతర వేగం.
speedh= నిలువు వేగం.
ang= క్షితిజ సమాంతర కోణం.
వేచి = వేచి ఉండే విరామం.
రీసెట్ రీసెట్ చర్య.
autog ఆటో-గో చర్య.
autob స్వీయ-వెనుక చర్య.
పునరావృత చర్యల కోసం do - enddo ఉపయోగించండి. నమూనా 5 చూడండి.
ప్రారంభ స్థానానికి తిరిగి రావడానికి స్వయంచాలకంగా వెనుకకు.
స్వయంచాలకంగా ఎగరడానికి ఆటో-గో.
కార్యక్రమం:
స్థిరాంకాలు: pi మరియు ఏదైనా int/floating number
వేరియబుల్స్: u v
ఆపరేటర్లు: + - * / > < == & |
విధులు: if(exp,exp1,exp2)
sin() cos() tan() asin() acos() atan()
sinh() cosh() tanh() log() ln() rand()
exp() abs() sqrt() pow(base,exponent)
ప్రోగ్రామ్ కోసం సూచనలు
// వ్యాఖ్యల కోసం
వేగం = క్షితిజ సమాంతర వేగం.
speedh= నిలువు వేగం.
ang= క్షితిజ సమాంతర కోణం.
వేచి = వేచి ఉండే విరామం.
రీసెట్ రీసెట్ చర్య.
autog ఆటో-గో చర్య.
autob స్వీయ-వెనుక చర్య.
పునరావృత చర్యల కోసం do - enddo ఉపయోగించండి. నమూనా 5 చూడండి.
అప్డేట్ అయినది
డెవలపర్లు మీ డేటాను ఎలా సేకరిస్తారు, ఎలా షేర్ చేస్తారో అర్థం చేసుకోవడంతో భద్రత అనేది ప్రారంభమవుతుంది. డేటా గోప్యత, సెక్యూరిటీ ప్రాక్టీసులు, మీ వినియోగం, ప్రాంతం ఇంకా వయస్సు ఆధారంగా మారవచ్చు. డెవలపర్ ఈ సమాచారాన్ని అందించారు అలాగే కాలక్రమేణా దాన్ని అప్డేట్ చేయవచ్చు.

థర్డ్-పార్టీలతో ఎలాంటి డేటా షేర్ చేయబడలేదు
డెవలపర్లు షేరింగ్ను ఎలా ప్రకటిస్తారు అనేదాని గురించి మరింత తెలుసుకోండి

ఎలాంటి డేటా సేకరించబడలేదు
డెవలపర్లు సేకరణను ఎలా ప్రకటిస్తారు అనేదాని గురించి మరింత తెలుసుకోండి
కొత్తగా ఏముంది
2.2 Android U
1.8 Use of random function
1.7 Error detector
1.6 Drone coordinates
1.5 More Samples
1.4 Program
1.3 Android S
1.8 Use of random function
1.7 Error detector
1.6 Drone coordinates
1.5 More Samples
1.4 Program
1.3 Android S
యాప్ సపోర్ట్
డెవలపర్ గురించిన సమాచారం
Leopoldo Rodriguez Cabañas
leorodwm@gmail.com
Spain
undefined





