
Arduino Bluetooth Controller
มีโฆษณา
2.9star
919 รีวิว
100K+
ดาวน์โหลด

สำหรับทุกคน
info




เกี่ยวกับแอปนี้
คุณเป็นคนที่กระตือรือร้น Arduino ที่อยากจะควบคุมระยะไกลโครงการของคุณผ่านทางโทรศัพท์ Android ของคุณ แต่ไม่ได้มีเวลาที่ความอดทนหรือความรู้ในการสร้าง Android บลูทู ธ ตัวควบคุม? แล้ว ARDUINO BLUETOOTH CONTROLLER เป็นสิ่งที่คุณต้องการ
นี้โปรแกรมหุ่นยนต์สามารถสร้างการเชื่อมต่อกับโครงการ Arduino / ไมโครคอนโทรลเลอร์ที่เกี่ยวข้องกับโมดูลบลูทู ธ ! จะช่วยให้ผู้ใช้สามารถตั้ง UUID ของโมดูลบลูทู ธ ของเขาเองเพื่อเชื่อมต่อโปรแกรมหุ่นยนต์กับโครงการของเขา! UUID เริ่มต้นที่มาพร้อมกับโปรแกรมนี้สำหรับ HC-06 อนุกรมไร้สายบลูทู ธ 4 ขา RF Transceiver โมดูล RS232 (ถ้าคุณใช้ UUID เริ่มต้นในการที่จะจับคู่โมดูล BT มาร์ทโฟนของคุณเป็นครั้งแรกที่คุณจะต้องให้รหัสผ่าน 4 หลัก. รหัสผ่านนี้เป็น '1234 '.)
โปรแกรมประกอบด้วย 4 โหมดคำสั่ง:
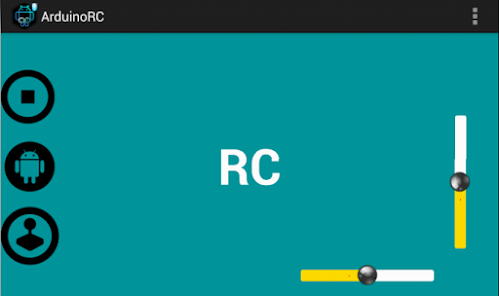
1 โหมดยานพาหนะ: โดยการกดปุ่ม "จอยสติ๊ก" ผู้ใช้ระยะไกลสามารถควบคุมรถด้วยท่าทางที่เฉพาะเจาะจง สำหรับการตีความของท่าทางคำสั่ง, โปรแกรมประยุกต์ที่ใช้ในตัวเซ็นเซอร์ accelerometer ของอุปกรณ์สมาร์ท มี 8 ท่าทางที่แตกต่างกัน (หน้า, หลัง, ซ้าย, ขวา, FRONT_LEFT, FRONT_RIGHT, BACK_LEFT, BACK_RIGHT)
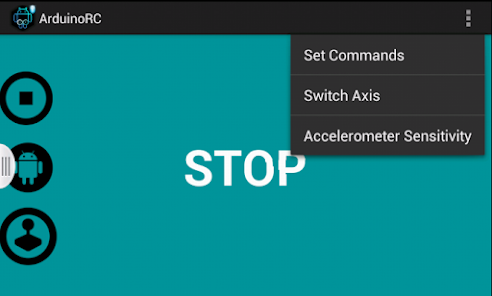
คุณสามารถตั้งค่ารูปแบบลายเส้นเหล่านี้ด้วยคำสั่งที่กำหนดเองของคุณเองผ่านปุ่มเมนู "ตั้งคำสั่ง"
นอกจากนี้ยังมีเป็น STOP และปุ่ม ANDROID ที่สามารถกำหนดให้กับคำสั่งที่กำหนดเองได้เป็นอย่างดี
*** สำคัญ *** โหมดให้ผ่านทางเมนูตัวเลือกตัวเลือกในการเปลี่ยนทิศทางของแกนเหล่า accelerometer (X> Y, Y-> X) เพื่อดำเนินการอย่างถูกต้องในโทรศัพท์ Android ที่มีการปรับค่าเริ่มต้นที่แตกต่างกัน
นอกจากนี้ตัวเลือกเมนูให้ปุ่มการเปลี่ยนแปลงความไวในการปรับเปลี่ยนจุดที่แอพพลิเคจับเหตุการณ์ท่าทางสำหรับโหมดนี้ เป็นชื่อแนะนำโหมดนี้ถูกออกแบบมาเพื่อการควบคุมระยะไกลรถที่ใช้โมดูลบลูทู ธ และไมโครคอนโทรลเลอร์
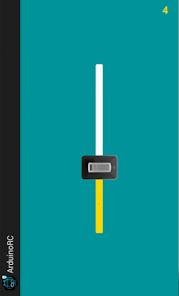
2 เฟดเดอร์โหมด: โหมดนี้จะให้ผู้ใช้ที่มีเฟดเดอร์-seekbar ที่สามารถส่งคำสั่งที่ 0-9 และให้ผู้ใช้ในการทดสอบกับเซอร์โวไฟ LED, มอเตอร์และอื่น ๆ อีกมากมาย
3 โหมดการควบคุม: โหมดนี้จะให้รูปแบบการควบคุมมาตรฐานที่มี 10 ปุ่มทั้งหมดที่สามารถกำหนดให้กับคำสั่งที่กำหนดเอง ปุ่มลูกศรได้รับการออกแบบมาเฉพาะเพื่อการส่งคำสั่งอย่างต่อเนื่องในขณะที่กดเพื่อจำลองการควบคุมที่เกิดขึ้นจริง
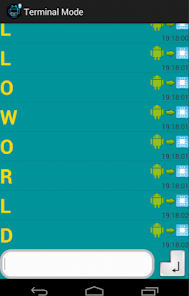
4 โหมดขั้ว: โหมดนี้มีอินเตอร์เฟซขั้วเหมือนที่ผู้ใช้สามารถพิมพ์และส่งคำสั่งของแต่ละบุคคลหรือหลายที่จะดำเนินการตามลำดับ ตั้งแต่พอร์ตอนุกรม Arduino ได้รับหนึ่งไบต์ในเวลาถ้าผู้ใช้สตริงในฟิลด์ป้อนข้อความโปรแกรมแบ่งสตริงที่เป็นตัวอักษรและส่งพวกเขาหนึ่งโดยหนึ่งเพื่อ Arduino มันควรจะตั้งข้อสังเกตว่าช่องว่างหรือสตริงว่างจะถูกข้ามไป
ทั้งหมดการตั้งค่าโปรแกรมและคำสั่งจะถูกเก็บไว้อย่างถาวรและสามารถเข้าถึงได้และมีการปรับเปลี่ยนได้ตลอดเวลาตามความต้องการของคุณ
# # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # #
Arduino ด้านรหัส
โค้ดด้านล่างเป็นตัวอย่างของวิธี Arduino "สามารถฟัง" คำสั่งที่ได้รับผ่านการประยุกต์ใช้ Android นี้
ถ่าน incomingByte / / ตัวแปรที่จะรับข้อมูลจากพอร์ตอนุกรม
การติดตั้งเป็นโมฆะ () {
Serial.begin (9600) / / เริ่มต้นการสื่อสารแบบอนุกรมที่ 9600bps
}
ห่วงเป็นโมฆะ () {
ถ้า (Serial.available ()> 0) / / ถ้ามีข้อมูลในการอ่าน
{
incomingByte = Serial.read () / / อ่านมันและเก็บไว้ใน 'incomingByte'
}
}
____________________________________
© 'Arduino' เป็นเครื่องหมายการค้าของทีม Arduino
____________________________________
นี้โปรแกรมหุ่นยนต์สามารถสร้างการเชื่อมต่อกับโครงการ Arduino / ไมโครคอนโทรลเลอร์ที่เกี่ยวข้องกับโมดูลบลูทู ธ ! จะช่วยให้ผู้ใช้สามารถตั้ง UUID ของโมดูลบลูทู ธ ของเขาเองเพื่อเชื่อมต่อโปรแกรมหุ่นยนต์กับโครงการของเขา! UUID เริ่มต้นที่มาพร้อมกับโปรแกรมนี้สำหรับ HC-06 อนุกรมไร้สายบลูทู ธ 4 ขา RF Transceiver โมดูล RS232 (ถ้าคุณใช้ UUID เริ่มต้นในการที่จะจับคู่โมดูล BT มาร์ทโฟนของคุณเป็นครั้งแรกที่คุณจะต้องให้รหัสผ่าน 4 หลัก. รหัสผ่านนี้เป็น '1234 '.)
โปรแกรมประกอบด้วย 4 โหมดคำสั่ง:
1 โหมดยานพาหนะ: โดยการกดปุ่ม "จอยสติ๊ก" ผู้ใช้ระยะไกลสามารถควบคุมรถด้วยท่าทางที่เฉพาะเจาะจง สำหรับการตีความของท่าทางคำสั่ง, โปรแกรมประยุกต์ที่ใช้ในตัวเซ็นเซอร์ accelerometer ของอุปกรณ์สมาร์ท มี 8 ท่าทางที่แตกต่างกัน (หน้า, หลัง, ซ้าย, ขวา, FRONT_LEFT, FRONT_RIGHT, BACK_LEFT, BACK_RIGHT)
คุณสามารถตั้งค่ารูปแบบลายเส้นเหล่านี้ด้วยคำสั่งที่กำหนดเองของคุณเองผ่านปุ่มเมนู "ตั้งคำสั่ง"
นอกจากนี้ยังมีเป็น STOP และปุ่ม ANDROID ที่สามารถกำหนดให้กับคำสั่งที่กำหนดเองได้เป็นอย่างดี
*** สำคัญ *** โหมดให้ผ่านทางเมนูตัวเลือกตัวเลือกในการเปลี่ยนทิศทางของแกนเหล่า accelerometer (X> Y, Y-> X) เพื่อดำเนินการอย่างถูกต้องในโทรศัพท์ Android ที่มีการปรับค่าเริ่มต้นที่แตกต่างกัน
นอกจากนี้ตัวเลือกเมนูให้ปุ่มการเปลี่ยนแปลงความไวในการปรับเปลี่ยนจุดที่แอพพลิเคจับเหตุการณ์ท่าทางสำหรับโหมดนี้ เป็นชื่อแนะนำโหมดนี้ถูกออกแบบมาเพื่อการควบคุมระยะไกลรถที่ใช้โมดูลบลูทู ธ และไมโครคอนโทรลเลอร์
2 เฟดเดอร์โหมด: โหมดนี้จะให้ผู้ใช้ที่มีเฟดเดอร์-seekbar ที่สามารถส่งคำสั่งที่ 0-9 และให้ผู้ใช้ในการทดสอบกับเซอร์โวไฟ LED, มอเตอร์และอื่น ๆ อีกมากมาย
3 โหมดการควบคุม: โหมดนี้จะให้รูปแบบการควบคุมมาตรฐานที่มี 10 ปุ่มทั้งหมดที่สามารถกำหนดให้กับคำสั่งที่กำหนดเอง ปุ่มลูกศรได้รับการออกแบบมาเฉพาะเพื่อการส่งคำสั่งอย่างต่อเนื่องในขณะที่กดเพื่อจำลองการควบคุมที่เกิดขึ้นจริง
4 โหมดขั้ว: โหมดนี้มีอินเตอร์เฟซขั้วเหมือนที่ผู้ใช้สามารถพิมพ์และส่งคำสั่งของแต่ละบุคคลหรือหลายที่จะดำเนินการตามลำดับ ตั้งแต่พอร์ตอนุกรม Arduino ได้รับหนึ่งไบต์ในเวลาถ้าผู้ใช้สตริงในฟิลด์ป้อนข้อความโปรแกรมแบ่งสตริงที่เป็นตัวอักษรและส่งพวกเขาหนึ่งโดยหนึ่งเพื่อ Arduino มันควรจะตั้งข้อสังเกตว่าช่องว่างหรือสตริงว่างจะถูกข้ามไป
ทั้งหมดการตั้งค่าโปรแกรมและคำสั่งจะถูกเก็บไว้อย่างถาวรและสามารถเข้าถึงได้และมีการปรับเปลี่ยนได้ตลอดเวลาตามความต้องการของคุณ
# # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # # #
Arduino ด้านรหัส
โค้ดด้านล่างเป็นตัวอย่างของวิธี Arduino "สามารถฟัง" คำสั่งที่ได้รับผ่านการประยุกต์ใช้ Android นี้
ถ่าน incomingByte / / ตัวแปรที่จะรับข้อมูลจากพอร์ตอนุกรม
การติดตั้งเป็นโมฆะ () {
Serial.begin (9600) / / เริ่มต้นการสื่อสารแบบอนุกรมที่ 9600bps
}
ห่วงเป็นโมฆะ () {
ถ้า (Serial.available ()> 0) / / ถ้ามีข้อมูลในการอ่าน
{
incomingByte = Serial.read () / / อ่านมันและเก็บไว้ใน 'incomingByte'
}
}
____________________________________
© 'Arduino' เป็นเครื่องหมายการค้าของทีม Arduino
____________________________________
อัปเดตเมื่อ
ความปลอดภัยเริ่มต้นด้วยความเข้าใจเกี่ยวกับวิธีที่นักพัฒนาแอปรวบรวมและแชร์ข้อมูล แนวทางปฏิบัติด้านความเป็นส่วนตัวและความปลอดภัยของข้อมูลอาจแตกต่างกันไปตามการใช้งาน ภูมิภาค และอายุของคุณ นักพัฒนาแอปได้ให้ข้อมูลนี้ไว้และอาจอัปเดตข้อมูลในส่วนนี้เมื่อเวลาผ่านไป

ไม่มีการแชร์ข้อมูลกับบุคคลที่สาม
ดูข้อมูลเพิ่มเติมเกี่ยวกับวิธีที่นักพัฒนาแอปประกาศเรื่องการแชร์ข้อมูล

ไม่มีข้อมูลที่รวบรวมไว้
ดูข้อมูลเพิ่มเติมเกี่ยวกับวิธีที่นักพัฒนาแอปประกาศเรื่องการรวบรวมข้อมูล
การให้คะแนนและรีวิว
2.9
827 รีวิว

ผู้ใช้ Google
- แจ้งว่าไม่เหมาะสม
30 มกราคม 2561
ดี
4 คนพบว่ารีวิวนี้มีประโยชน์
ผู้ใช้ Google
- แจ้งว่าไม่เหมาะสม
26 มิถุนายน 2560
แย่
1 คนพบว่ารีวิวนี้มีประโยชน์
การสนับสนุนของแอป
เกี่ยวกับนักพัฒนาแอป
ioannis tzanellis
ioannis.kiwe@gmail.com
Netherlands
undefined