
AndrDron
500+
Nedladdningar

Ingen åldersgräns
info
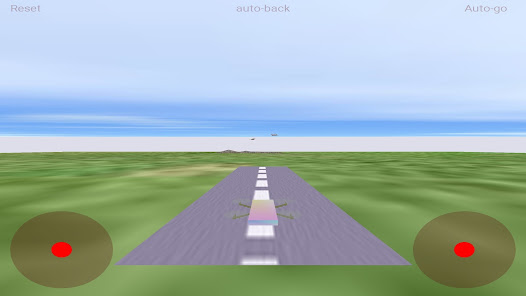
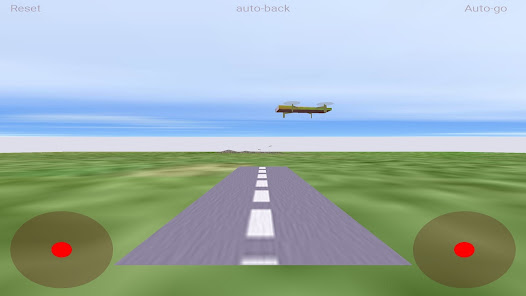

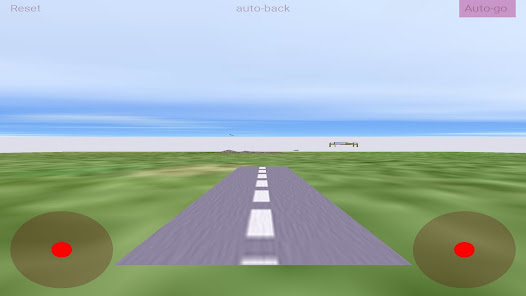
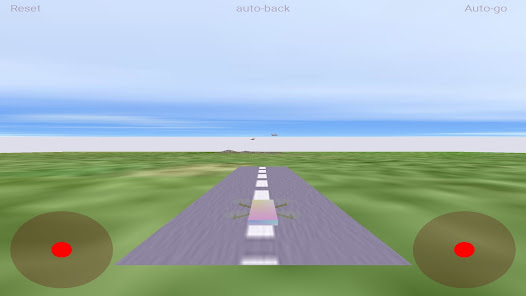
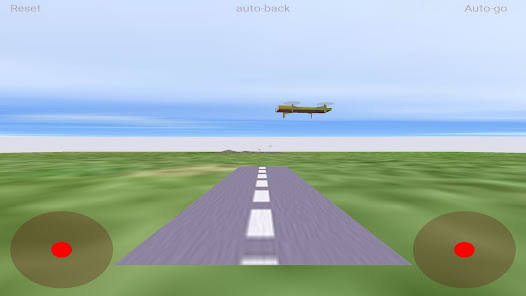
Om spelet
Du kan hantera drönaren i hastighet, höjd och rotation.
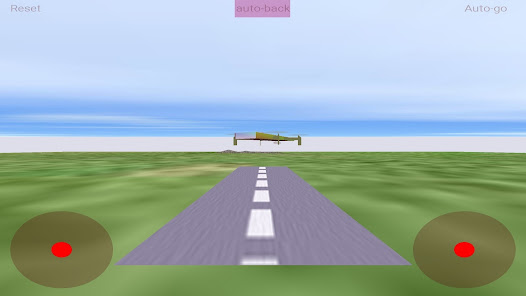
Autoback för att återgå till utgångsläget.
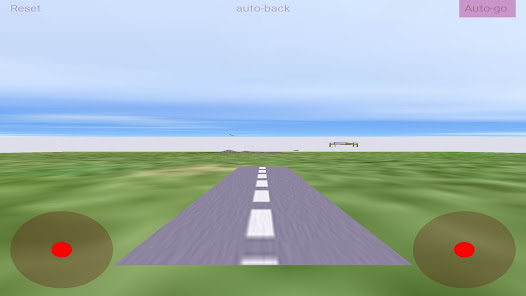
Auto-gå för att flyga automatiskt.
Program:
Konstanter: pi och valfritt int/flytande tal
Variabler: u v
Operatörer: + - * / > < == & |
Funktioner: if(exp,exp1,exp2)
sin() cos() tan() asin() acos() atan()
sinh() cosh() tanh() log() ln() rand()
exp() abs() sqrt() pow(bas, exponent)
Instruktioner för att programmera
// För kommentarer
hastighet= Den horisontella hastigheten.
speedh= Den vertikala hastigheten.
ang= Den horisontella vinkeln.
wait= Vänteintervallet.
reset Återställningsåtgärden.
autog Åtgärden för autostart.
autob Åtgärden för auto-back.
För repetitiva handlingar använd do - enddo. Se exempel 5.
Autoback för att återgå till utgångsläget.
Auto-gå för att flyga automatiskt.
Program:
Konstanter: pi och valfritt int/flytande tal
Variabler: u v
Operatörer: + - * / > < == & |
Funktioner: if(exp,exp1,exp2)
sin() cos() tan() asin() acos() atan()
sinh() cosh() tanh() log() ln() rand()
exp() abs() sqrt() pow(bas, exponent)
Instruktioner för att programmera
// För kommentarer
hastighet= Den horisontella hastigheten.
speedh= Den vertikala hastigheten.
ang= Den horisontella vinkeln.
wait= Vänteintervallet.
reset Återställningsåtgärden.
autog Åtgärden för autostart.
autob Åtgärden för auto-back.
För repetitiva handlingar använd do - enddo. Se exempel 5.
Uppdaterades den
Säkerhet börjar med förståelsen av hur utvecklare samlar in och delar din data. Praxis för dataintegritet och säkerhet varierar beroende på användning, region och ålder. Utvecklaren har tillhandahållit denna information och kan uppdatera den med tiden.


Nyheter
2.2 Android U
1.8 Use of random function
1.7 Error detector
1.6 Drone coordinates
1.5 More Samples
1.4 Program
1.3 Android S
1.8 Use of random function
1.7 Error detector
1.6 Drone coordinates
1.5 More Samples
1.4 Program
1.3 Android S





