
Plan de vuelo con drones
Contém anúncios
3,6star
7 avaliações
1 mil+
Downloads

Todos
info







Sobre este app
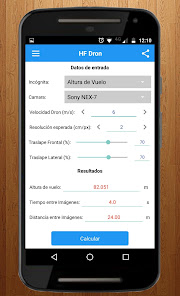
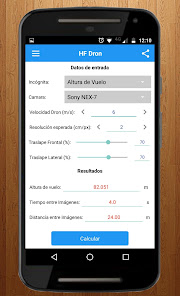
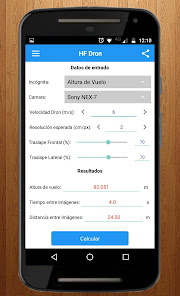
Calcula os parâmetros que determinam um vôo missão zangão com base na altitude de vôo ou resolução (tamanho do pixel) esperado na imagem.
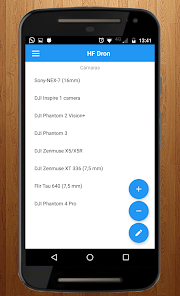
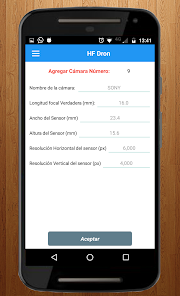
Adiciona, exclui ou modifica características de câmeras.
Os parâmetros são:
-time entre imagens: Este valor indica o intervalo de tempo em que a aquisição de imagens para atender os dados do problema, sabendo que este valor pode programar o seu robô câmera para tirar fotos de vez em quando. Comumente fala de segundos (2 s, 3 S, 4 S, etc).
• distância entre imagens: Você pode programar a câmera para tirar fotos de vez em quando ou a cada certa distância, este valor indica a distância percorrida o drone para adquirir uma imagem da superfície.
• distância entre linhas de vôo (DLV): Normalmente, a área a ser coberta pela fuga é essa extensão não pode ser coberta uma vez no caminho do robô, por isso é necessário fazer vários passes ou linhas caminhos aéreas paralelos um ao outro.
-width (A) e alta (B) cobrindo uma imagem na superfície: Estes valores indicam a largura e comprimento em metros cobrindo uma fotografia tirada com uma certa altura zumbido. Com base nestes valores, é obtida a área que cobre a imagem.
Adiciona, exclui ou modifica características de câmeras.
Os parâmetros são:
-time entre imagens: Este valor indica o intervalo de tempo em que a aquisição de imagens para atender os dados do problema, sabendo que este valor pode programar o seu robô câmera para tirar fotos de vez em quando. Comumente fala de segundos (2 s, 3 S, 4 S, etc).
• distância entre imagens: Você pode programar a câmera para tirar fotos de vez em quando ou a cada certa distância, este valor indica a distância percorrida o drone para adquirir uma imagem da superfície.
• distância entre linhas de vôo (DLV): Normalmente, a área a ser coberta pela fuga é essa extensão não pode ser coberta uma vez no caminho do robô, por isso é necessário fazer vários passes ou linhas caminhos aéreas paralelos um ao outro.
-width (A) e alta (B) cobrindo uma imagem na superfície: Estes valores indicam a largura e comprimento em metros cobrindo uma fotografia tirada com uma certa altura zumbido. Com base nestes valores, é obtida a área que cobre a imagem.
Atualizado em
Segurança dos dados
Nesta seção, os desenvolvedores podem exibir informações sobre como o app coleta e usa seus dados. Saiba mais sobre a segurança dos dados

Nenhuma informação disponível
Classificações e resenhas
3,6
7 avaliações
O que há de novo
Corrección de errores
Suporte do app
phone
Número de telefone
+527773053164



