
QGroundControl (Daily Test Bui
4.0star
78 ግምገማዎች
5 ሺ+
ውርዶች

ሁሉም ሰው
info

ስለዚህ መተግበሪያ
አስፈላጊ: ይህ የ QGroundControl ስሪት ዕለታዊ የሙከራ ስሪት ነው። ልክ እንደ ተደገፈው የተረጋጋ ስሪት የተረጋጋ ላይሆን ይችላል። በ QGroundControl ልማት ቡድን በየቀኑ የሚጨመሩትን ሁሉንም የቅርብ ጊዜ ባህሪያቶች አሉት። ይህ ስሪት በጥንቃቄ ጥቅም ላይ መዋል አለበት።
QGroundControl ለ ArduPilot ወይም ለ PX4 Pro ኃይል ላላቸው ተሽከርካሪዎች ሙሉ የበረራ ቁጥጥር እና ውቅረትን ይሰጣል ፡፡ የ QGroundControl ግብ ለአዳዲስ ተጠቃሚዎች የአጠቃቀም ቀላልነት እንዲሁም ለልምድ ተጠቃሚዎች የከፍተኛ መጨረሻ የባህሪ ድጋፍ ነው ፡፡
QGroundControl ባህሪዎች
- PX4 Pro እና ArduPilot (ArduCopter ፣ ArduPlane ፣ ArduRover ፣ ArduSub) firmware ለሚሠሩ ተሽከርካሪዎች ሙሉ የውቅር ድጋፍ
- ለራስ ገዝ በረራ ተልዕኮ ማቀድ
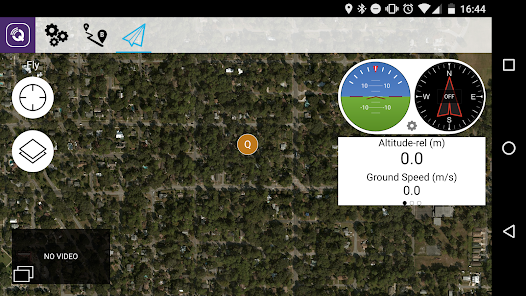
- የተሽከርካሪ አቀማመጥን ፣ የበረራ ትራክን ፣ የመንገድ ነጥቦችን እና የተሽከርካሪ መሣሪያዎችን የሚያሳይ የበረራ ካርታ ማሳያ
- የቪዲዮ ዥረት ከመሳሪያ ማሳያ ተደራቢዎች ጋር
- ለማንኛውም የ MAVLink ችሎታ ላለው ተሽከርካሪ የበረራ ድጋፍ
QGroundControl እንዲሁ ለዊንዶውስ ፣ ማኮስ ፣ ሊነክስ እና iOS ይገኛል ፡፡
የመልቀቂያ ማስታወሻዎች
QGroundControl ኦፊሴላዊ ጣቢያ
ሰነድ
ድጋፍ
QGroundControl ለ ArduPilot ወይም ለ PX4 Pro ኃይል ላላቸው ተሽከርካሪዎች ሙሉ የበረራ ቁጥጥር እና ውቅረትን ይሰጣል ፡፡ የ QGroundControl ግብ ለአዳዲስ ተጠቃሚዎች የአጠቃቀም ቀላልነት እንዲሁም ለልምድ ተጠቃሚዎች የከፍተኛ መጨረሻ የባህሪ ድጋፍ ነው ፡፡
QGroundControl ባህሪዎች
- PX4 Pro እና ArduPilot (ArduCopter ፣ ArduPlane ፣ ArduRover ፣ ArduSub) firmware ለሚሠሩ ተሽከርካሪዎች ሙሉ የውቅር ድጋፍ
- ለራስ ገዝ በረራ ተልዕኮ ማቀድ
- የተሽከርካሪ አቀማመጥን ፣ የበረራ ትራክን ፣ የመንገድ ነጥቦችን እና የተሽከርካሪ መሣሪያዎችን የሚያሳይ የበረራ ካርታ ማሳያ
- የቪዲዮ ዥረት ከመሳሪያ ማሳያ ተደራቢዎች ጋር
- ለማንኛውም የ MAVLink ችሎታ ላለው ተሽከርካሪ የበረራ ድጋፍ
QGroundControl እንዲሁ ለዊንዶውስ ፣ ማኮስ ፣ ሊነክስ እና iOS ይገኛል ፡፡
የመልቀቂያ ማስታወሻዎች
QGroundControl ኦፊሴላዊ ጣቢያ
ሰነድ
ድጋፍ
የተዘመነው በ
የውሂብ ደህንነት
ገንቢዎች መተግበሪያቸው እንዴት የእርስዎን ውሂብ እንደሚሰበስብ እና እንደሚጠቀምበት ላይ መረጃ እዚህ ማሳየት ይችላሉ። ስለውሂብ ደህንነት የበለጠ ይወቁ

ምንም መረጃ አይገኝም
ደረጃዎች እና ግምገማዎች
4.2
70 ግምገማዎች