
QGroundControl (Daily Test Bui
4,0star
78 ressenyes
5 k+
Baixades

Per a tots els públics
info

Sobre l'aplicació
IMPORTANT: aquesta versió de QGroundControl és la versió de proves diàries. Pot ser que no sigui tan estable com la versió Stable compatible. Té totes les funcions més recents que l’equip de desenvolupament de QGroundControl afegeix diàriament. Aquesta versió s’ha d’utilitzar amb precaució.
QGroundControl proporciona control i configuració de vol complets per a vehicles alimentats per ArduPilot o PX4 Pro. L'objectiu de QGroundControl és millorar la facilitat d'ús per als usuaris nous, així com el suport de funcions de gamma alta per a usuaris experimentats.
Funcions de QGroundControl:
- Suport complet de configuració per a vehicles amb PX4 Pro i ArduPilot (ArduCopter, ArduPlane, ArduRover, ArduSub)
- Planificació de la missió de vol autònom
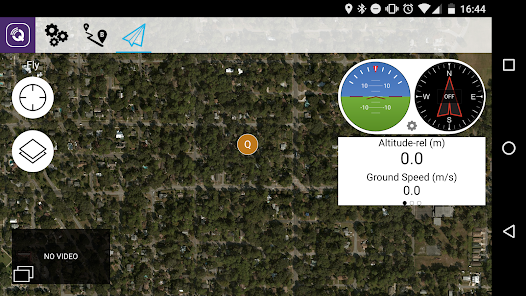
- Visualització del mapa de vol que mostra la posició del vehicle, la pista de vol, els waypoints i els instruments del vehicle
- Transmissió de vídeo amb superposicions de visualització d’instruments
- Suport de vol per a qualsevol vehicle amb capacitat per MAVLink
QGroundControl també està disponible per a Windows, MacOS, Linux i iOS.
Notes de llançament
Lloc oficial de QGroundControl
Documentació
Assistència
QGroundControl proporciona control i configuració de vol complets per a vehicles alimentats per ArduPilot o PX4 Pro. L'objectiu de QGroundControl és millorar la facilitat d'ús per als usuaris nous, així com el suport de funcions de gamma alta per a usuaris experimentats.
Funcions de QGroundControl:
- Suport complet de configuració per a vehicles amb PX4 Pro i ArduPilot (ArduCopter, ArduPlane, ArduRover, ArduSub)
- Planificació de la missió de vol autònom
- Visualització del mapa de vol que mostra la posició del vehicle, la pista de vol, els waypoints i els instruments del vehicle
- Transmissió de vídeo amb superposicions de visualització d’instruments
- Suport de vol per a qualsevol vehicle amb capacitat per MAVLink
QGroundControl també està disponible per a Windows, MacOS, Linux i iOS.
Notes de llançament
Lloc oficial de QGroundControl
Documentació
Assistència
Data d'actualització:
Seguretat de les dades
Els desenvolupadors poden mostrar aquí informació sobre com l'aplicació recull i utilitza les teves dades. Més informació sobre la seguretat de les dades

No hi ha informació disponible
Puntuacions i ressenyes
4,2
70 ressenyes