
QGroundControl (Daily Test Bui
4,0star
78 recenzí
5 tis.+
Stahování

Všichni (E)
info

Informace o aplikaci
DŮLEŽITÉ: Tato verze QGroundControl je denní testovací verze. Nemusí být tak stabilní jako podporovaná stabilní verze. Má všechny nejnovější funkce, které denně přidává vývojový tým QGroundControl. Tuto verzi je třeba používat opatrně.
QGroundControl poskytuje plnou kontrolu a konfiguraci letu pro vozidla s pohonem ArduPilot nebo PX4 Pro. Cílem QGroundControl je vylepšené snadné použití pro nové uživatele a podpora špičkových funkcí pro zkušené uživatele.
Funkce QGroundControl:
- Plná podpora konfigurace pro vozidla s firmwarem PX4 Pro a ArduPilot (ArduCopter, ArduPlane, ArduRover, ArduSub)
- Plánování mise pro autonomní let
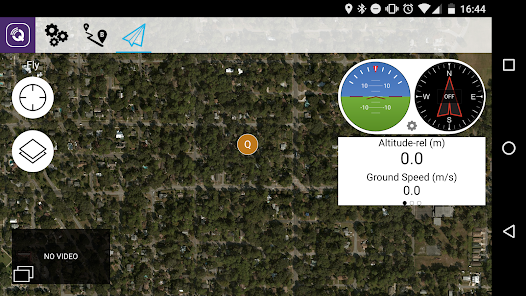
- Zobrazení letové mapy zobrazující polohu vozidla, letovou stopu, body na trase a přístroje vozidla
- Streamování videa s překryvnými vrstvami displeje přístroje
- Podpora letu pro jakékoli vozidlo podporující MAVLink
QGroundControl je k dispozici také pro Windows, MacOS, Linux a iOS.
poznámky k verzi
Oficiální stránky QGroundControl
Dokumentace
Podpora
QGroundControl poskytuje plnou kontrolu a konfiguraci letu pro vozidla s pohonem ArduPilot nebo PX4 Pro. Cílem QGroundControl je vylepšené snadné použití pro nové uživatele a podpora špičkových funkcí pro zkušené uživatele.
Funkce QGroundControl:
- Plná podpora konfigurace pro vozidla s firmwarem PX4 Pro a ArduPilot (ArduCopter, ArduPlane, ArduRover, ArduSub)
- Plánování mise pro autonomní let
- Zobrazení letové mapy zobrazující polohu vozidla, letovou stopu, body na trase a přístroje vozidla
- Streamování videa s překryvnými vrstvami displeje přístroje
- Podpora letu pro jakékoli vozidlo podporující MAVLink
QGroundControl je k dispozici také pro Windows, MacOS, Linux a iOS.
poznámky k verzi
Oficiální stránky QGroundControl
Dokumentace
Podpora
Datum aktualizace
Zabezpečení údajů
Vývojář na tomto místě může uvést, zda jeho aplikace shromažďuje a využívá vaše data. Další informace o zabezpečení údajů

Informace nejsou k dispozici
Hodnocení a recenze
4,2
70 recenzí