

RoboCam
Зар агуулсан

4.0star
142 шүүмж
10 мянга+
Таталтууд

Бүх насныханд
info



Энэ аппын тухай
RoboCam ашиглан FPV өөрийн LEGO Mindstorms EV3, Android эсвэл Raspberry Pi роботыг удирдаж болно.
Хурдан эхлэх гарын авлага (зөвхөн LEGO Mindstorms EV3 (45544) боловсролын хэрэгсэлтэй хүмүүст зориулсан):
1. Судлаач EV3-ийг цуглуулж (заавар: https://goo.gl/yPU4sa), асаагаад асаагаарай.
2. Ухаалаг гар утсанд RoboCam програмыг суулгана уу (утас 1).
3. Утасны 1-р Bluetooth-г унтрааж, Утас 1 ба EV3-ууд Bluetooth-ээр холбогдсон байх ёстой (тэд хос байх шаардлагатай).
4. Утасныхаа роботыг (цаашид Утас 2-ыг) хянахад ашигладаг Phone 1 ба смартфоныг ижил Wi-Fi-чиглүүлэгч рүү холбоно.
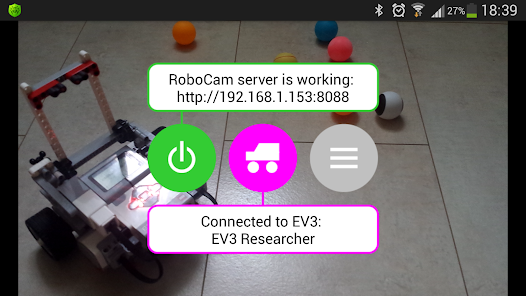
5. RoboCam сервер эхлүүлэх. Энэ нь зүүн ногоон товчийг түлхэж өгдөг.
6. Утас 1-ийг робот руу холбоно уу. Үүнийг дунд нь цэнхэр өнгөтэй товчлуур дарна.
7. Phone 2 дээр Google Chrome нээгдэж, Утас 1 дээр RoboCam аппликейшн дээр харуулав.
8. Утасны 2-р нэвтрэн орно уу (анхдагчаар админ ба 123-г ашигла).
9. Гар утасны 2 дээр Phone joystick, видео хоёр утасны дэлгэц гарч ирнэ. Утасныхаа түгжээг түгжээд робот руу холбоно.
10. Одоо та өөрийн роботоо 2-р утсаар хянах боломжтой.
Хэрэв та LEGO Mindstorms EV3 (31313) -ын гэрийн хэрэгсэлтэй бол эсвэл EV3 судлаачдын оронд EV3 роботыг хянахыг хүсч байгаа бол RoboCam апп-г тохируулах хэрэгтэй. RoboCam тохиргоог харна уу.
Програмыг ашиглахын тулд хоёр зүйлийг мэдэх хэрэгтэй: холболтыг хэрхэн тохируулах, хэрхэн хяналтыг хэрхэн гүйцэтгэх талаар.
Энэ бол стандарт холболтыг тохируулах хурдан гарын авлага юм. Хэрэглэгч: EV3 робот, суулгасан RoboCam (цаашид Утас 1), ухаалаг утас, таблет (Android, iOS эсвэл Windows) бүхий Android-ухаалаг гар утсыг HTML5 (цаашид Утас 2) дэмждэг орчин үеийн вэб хөтөчтэй. Утас 1 нь Bluetooth-ээр EV3-д холбогддог (төхөөрөмжүүдийг урьдчилан тохируулсан байх ёстой). Утас 1 дээр RoboCam сервер ажиллуулсны дараа Утас 1 болон Утас 2-ыг ижил WiFi чиглүүлэгч рүү холбосоны дараа та хөтөч дээр (Утас 2-ээс) RoboCam сервер рүү утсаар холбогдож болно. Үүнийг хийхийн тулд хаягийг RoboCam-д харуулсан browser хаягийн талбарт бичих хэрэгтэй. Жишээлбэл, http://192.168.1.2:8088
Энэ бол хяналтыг хэрхэн яаж хийх тухай товч тайлбар юм. RoboCam сервер рүү утсаар холбогдон RoboCam Web програмаа оруулсны дараа Утас 1-ийн камерыг харах болно. Утасныхаа 1-ийг робот руу залгаад камерыг урагш чиглүүлнэ. Утасны 2 дахь веб апп нь тохиргооноос шалтгаалан роботыг удирдахын тулд 1-4-н joysticks байж болно. Хүрч хүрэхэд мэдрэгчийн цэгүүдийн координатыг Утас 1 дээр RoboCam програм руу шилжүүлээд дараа нь joystick тохиргооноос хамааран EV3 хөдөлгүүрийн команд буюу EV3 мэйл хайрцаг руу илгээгддэг. Хэрэв координатыг шуудангийн хайрцагт илгээнэ гэвэл нэмэлт EV3 програмыг бичих хэрэгтэй. Шуудангийн хайрцгийн нэрс: x ба y - joystick 1, w ба z - joystick 2, а ба b - joystick 3, c, d - joystick 4.
Анхдагчаар програм нь "EV3 Судлаач" -ын зөвхөн нэг роботын тохиргоог хийсэн бөгөөд та EV3 Судлаач LEGO Mindstorms EV3 (45544) -ийн сургалтын хэрэгслийг цуглуулж болно. : https://goo.gl/yPU4sa
Хурдан эхлэх гарын авлага (зөвхөн LEGO Mindstorms EV3 (45544) боловсролын хэрэгсэлтэй хүмүүст зориулсан):
1. Судлаач EV3-ийг цуглуулж (заавар: https://goo.gl/yPU4sa), асаагаад асаагаарай.
2. Ухаалаг гар утсанд RoboCam програмыг суулгана уу (утас 1).
3. Утасны 1-р Bluetooth-г унтрааж, Утас 1 ба EV3-ууд Bluetooth-ээр холбогдсон байх ёстой (тэд хос байх шаардлагатай).
4. Утасныхаа роботыг (цаашид Утас 2-ыг) хянахад ашигладаг Phone 1 ба смартфоныг ижил Wi-Fi-чиглүүлэгч рүү холбоно.
5. RoboCam сервер эхлүүлэх. Энэ нь зүүн ногоон товчийг түлхэж өгдөг.
6. Утас 1-ийг робот руу холбоно уу. Үүнийг дунд нь цэнхэр өнгөтэй товчлуур дарна.
7. Phone 2 дээр Google Chrome нээгдэж, Утас 1 дээр RoboCam аппликейшн дээр харуулав.
8. Утасны 2-р нэвтрэн орно уу (анхдагчаар админ ба 123-г ашигла).
9. Гар утасны 2 дээр Phone joystick, видео хоёр утасны дэлгэц гарч ирнэ. Утасныхаа түгжээг түгжээд робот руу холбоно.
10. Одоо та өөрийн роботоо 2-р утсаар хянах боломжтой.
Хэрэв та LEGO Mindstorms EV3 (31313) -ын гэрийн хэрэгсэлтэй бол эсвэл EV3 судлаачдын оронд EV3 роботыг хянахыг хүсч байгаа бол RoboCam апп-г тохируулах хэрэгтэй. RoboCam тохиргоог харна уу.
Програмыг ашиглахын тулд хоёр зүйлийг мэдэх хэрэгтэй: холболтыг хэрхэн тохируулах, хэрхэн хяналтыг хэрхэн гүйцэтгэх талаар.
Энэ бол стандарт холболтыг тохируулах хурдан гарын авлага юм. Хэрэглэгч: EV3 робот, суулгасан RoboCam (цаашид Утас 1), ухаалаг утас, таблет (Android, iOS эсвэл Windows) бүхий Android-ухаалаг гар утсыг HTML5 (цаашид Утас 2) дэмждэг орчин үеийн вэб хөтөчтэй. Утас 1 нь Bluetooth-ээр EV3-д холбогддог (төхөөрөмжүүдийг урьдчилан тохируулсан байх ёстой). Утас 1 дээр RoboCam сервер ажиллуулсны дараа Утас 1 болон Утас 2-ыг ижил WiFi чиглүүлэгч рүү холбосоны дараа та хөтөч дээр (Утас 2-ээс) RoboCam сервер рүү утсаар холбогдож болно. Үүнийг хийхийн тулд хаягийг RoboCam-д харуулсан browser хаягийн талбарт бичих хэрэгтэй. Жишээлбэл, http://192.168.1.2:8088
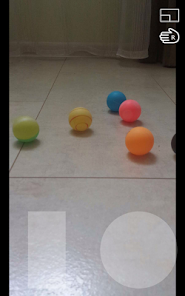
Энэ бол хяналтыг хэрхэн яаж хийх тухай товч тайлбар юм. RoboCam сервер рүү утсаар холбогдон RoboCam Web програмаа оруулсны дараа Утас 1-ийн камерыг харах болно. Утасныхаа 1-ийг робот руу залгаад камерыг урагш чиглүүлнэ. Утасны 2 дахь веб апп нь тохиргооноос шалтгаалан роботыг удирдахын тулд 1-4-н joysticks байж болно. Хүрч хүрэхэд мэдрэгчийн цэгүүдийн координатыг Утас 1 дээр RoboCam програм руу шилжүүлээд дараа нь joystick тохиргооноос хамааран EV3 хөдөлгүүрийн команд буюу EV3 мэйл хайрцаг руу илгээгддэг. Хэрэв координатыг шуудангийн хайрцагт илгээнэ гэвэл нэмэлт EV3 програмыг бичих хэрэгтэй. Шуудангийн хайрцгийн нэрс: x ба y - joystick 1, w ба z - joystick 2, а ба b - joystick 3, c, d - joystick 4.
Анхдагчаар програм нь "EV3 Судлаач" -ын зөвхөн нэг роботын тохиргоог хийсэн бөгөөд та EV3 Судлаач LEGO Mindstorms EV3 (45544) -ийн сургалтын хэрэгслийг цуглуулж болно. : https://goo.gl/yPU4sa
Шинэчилсэн огноо
Аюулгүй байдал нь хөгжүүлэгчид таны өгөгдлийг хэрхэн цуглуулж, хуваалцдаг болохыг ойлгохоос эхэлнэ. Өгөгдлийн нууцлал болон аюулгүй байдлын практик нь таны хэрэглээ, бүс нутаг болон наснаас хамаарч харилцан адилгүй байж болно. Хөгжүүлэгч энэ мэдээллийг өгсөн бөгөөд үүнийг цаг хугацааны явцад шинэчилж болно.

Гуравдагч талтай ямар ч өгөгдөл хуваалцаагүй
Хөгжүүлэгчид хуваалцахыг хэрхэн зарладаг талаар нэмэлт мэдээлэл авах

Ямар ч өгөгдөл цуглуулаагүй
Хөгжүүлэгчид цуглуулгыг хэрхэн зарладаг талаар нэмэлт мэдээлэл авах
Шинэ юм юу байна
Version 1.4.4
Fixed a lack of the menu for Add and Delete buttons on Android 7.
Version 1.4.3
Fixed an error while changing the screen orientation in Android 6 and later.
Version 1.4.2
Added local controls.
Version 1.3.1
Added a support for nonstandard platforms like Arduino and Raspberry Pi.
Version 1.2
1. Added a control via a keyboard (to update "Researcher EV3" settings you need to delete them first!!!).
2. Added an ability to run your EV3 program.
Fixed a lack of the menu for Add and Delete buttons on Android 7.
Version 1.4.3
Fixed an error while changing the screen orientation in Android 6 and later.
Version 1.4.2
Added local controls.
Version 1.3.1
Added a support for nonstandard platforms like Arduino and Raspberry Pi.
Version 1.2
1. Added a control via a keyboard (to update "Researcher EV3" settings you need to delete them first!!!).
2. Added an ability to run your EV3 program.