

RoboCam
Inneholder annonser

4,0star
142 anmeldelser
10k+
Nedlastinger

Alle
info



Om denne appen
Ved hjelp av RoboCam kan du styre din egen LEGO Mindstorms EV3, Android eller Raspberry Pi-robot.
Hurtigstartguide (kun for de som har et pedagogisk sett av LEGO Mindstorms EV3 (45544)):
1. Monter forsker EV3 (instruksjonen: https://goo.gl/yPU4sa), slå den på og sørg for at Bluetooth fungerer.
2. Installer RoboCam app på en smarttelefon (heretter Telefon 1).
3. Slå på Bluetooth på telefon 1 og sørg for at Telefon 1 og EV3 er koblet til via Bluetooth (de må være paret).
4. Koble til telefon 1 og smarttelefon som du vil bruke til å kontrollere roboten (heretter Telefon 2) til samme Wi-Fi-ruteren.
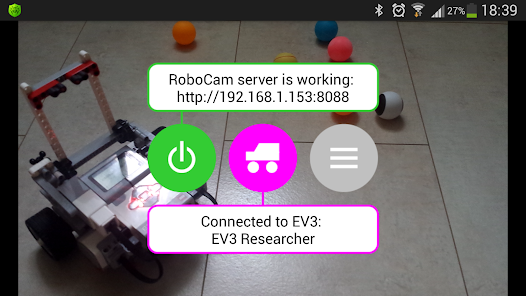
5. Start en RoboCam-server. For dette trykker du på den venstre grønne knappen.
6. Koble telefon 1 til roboten. For dette trykk på magenta knappen i midten.
7. Åpne Google Chrome på telefon 2 og gå til lenken som vises i RoboCam-appen på Telefon 1.
8. Logg inn på Telefon 2 (som standard bruker admin og 123).
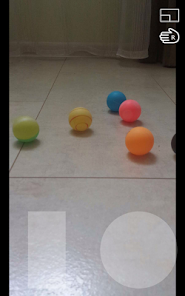
9. På telefon 2 vises to joystick og video fra kameraet på telefonen 1. Lås telefonen og fest den til roboten.
10. Nå kan du kontrollere roboten din via telefon 2.
Hvis du har et hjemmekit til LEGO Mindstorms EV3 (31313) eller du vil styre annen EV3-robot i stedet for Researcher EV3, må du sette opp RoboCam app. Se RoboCam-innstillinger.
For å bruke programmet må du vite to ting: hvordan du oppretter tilkoblingen og hvordan kontrollen skjer.
Det er den raske håndboken om å sette standardkoblingen. Behov: EV3-robot, Android-smarttelefon med den installerte RoboCam (heretter Telefon 1) og smarttelefonen eller nettbrettet (Android, iOS eller Windows) med en moderne nettleser som støttes HTML5 (heretter Telefon 2). Telefon 1 er koblet til EV3 via Bluetooth (enheter må forhåndsforsynt!). Etter at du har startet RoboCam-serveren på Telefon 1 og kobler Telefon 1 og Telefon 2 til samme WiFi-router, kan du koble til RoboCam-serveren (til Telefon 1) via nettleseren (fra Telefon 2). For å gjøre dette må du skrive adressen i nettleserens adressefelt som vil bli vist i RoboCam for eksempel http://192.168.1.2:8088
Det er den korte beskrivelsen av hvordan kontrollen skjer. Etter at du har koblet til RoboCam-serveren via en nettleser i Telefon 2 og angitt RoboCam Web-applikasjonen, vil du se alt som telefon 1 av kameraet ser. Fest telefon 1 til roboten, så kameraet er rettet fremover. Web-app på telefon 2 kan ha fra 1 til 4 styrespaker for å kontrollere roboten, avhengig av innstillingene. Når du berører styrespaken, blir koordinatene til berøringspunktene overført til RoboCam-programmet på Telefon 1, og deretter, avhengig av styrespakinnstillingene, blir de omformet til EV3-motorkommandoene eller sendt til EV3-postbokser. Hvis koordinatene sendes til postkasser, må du skrive et ekstra EV3-program for behandling av dem. Navn på postkassene følger: x og y - joystick 1, w og z - joystick 2, a og b - joystick 3, c og d - joystick 4.
Programmet har som standard en innstilling for bare en av roboten - EV3-forskeren », som du kan se på videoen. Du kan sette sammen EV3-forsker fra et pedagogisk sett av LEGO Mindstorms EV3 (45544). Last ned linkforskerens byggekretser : https://goo.gl/yPU4sa
Hurtigstartguide (kun for de som har et pedagogisk sett av LEGO Mindstorms EV3 (45544)):
1. Monter forsker EV3 (instruksjonen: https://goo.gl/yPU4sa), slå den på og sørg for at Bluetooth fungerer.
2. Installer RoboCam app på en smarttelefon (heretter Telefon 1).
3. Slå på Bluetooth på telefon 1 og sørg for at Telefon 1 og EV3 er koblet til via Bluetooth (de må være paret).
4. Koble til telefon 1 og smarttelefon som du vil bruke til å kontrollere roboten (heretter Telefon 2) til samme Wi-Fi-ruteren.
5. Start en RoboCam-server. For dette trykker du på den venstre grønne knappen.
6. Koble telefon 1 til roboten. For dette trykk på magenta knappen i midten.
7. Åpne Google Chrome på telefon 2 og gå til lenken som vises i RoboCam-appen på Telefon 1.
8. Logg inn på Telefon 2 (som standard bruker admin og 123).
9. På telefon 2 vises to joystick og video fra kameraet på telefonen 1. Lås telefonen og fest den til roboten.
10. Nå kan du kontrollere roboten din via telefon 2.
Hvis du har et hjemmekit til LEGO Mindstorms EV3 (31313) eller du vil styre annen EV3-robot i stedet for Researcher EV3, må du sette opp RoboCam app. Se RoboCam-innstillinger.
For å bruke programmet må du vite to ting: hvordan du oppretter tilkoblingen og hvordan kontrollen skjer.
Det er den raske håndboken om å sette standardkoblingen. Behov: EV3-robot, Android-smarttelefon med den installerte RoboCam (heretter Telefon 1) og smarttelefonen eller nettbrettet (Android, iOS eller Windows) med en moderne nettleser som støttes HTML5 (heretter Telefon 2). Telefon 1 er koblet til EV3 via Bluetooth (enheter må forhåndsforsynt!). Etter at du har startet RoboCam-serveren på Telefon 1 og kobler Telefon 1 og Telefon 2 til samme WiFi-router, kan du koble til RoboCam-serveren (til Telefon 1) via nettleseren (fra Telefon 2). For å gjøre dette må du skrive adressen i nettleserens adressefelt som vil bli vist i RoboCam for eksempel http://192.168.1.2:8088
Det er den korte beskrivelsen av hvordan kontrollen skjer. Etter at du har koblet til RoboCam-serveren via en nettleser i Telefon 2 og angitt RoboCam Web-applikasjonen, vil du se alt som telefon 1 av kameraet ser. Fest telefon 1 til roboten, så kameraet er rettet fremover. Web-app på telefon 2 kan ha fra 1 til 4 styrespaker for å kontrollere roboten, avhengig av innstillingene. Når du berører styrespaken, blir koordinatene til berøringspunktene overført til RoboCam-programmet på Telefon 1, og deretter, avhengig av styrespakinnstillingene, blir de omformet til EV3-motorkommandoene eller sendt til EV3-postbokser. Hvis koordinatene sendes til postkasser, må du skrive et ekstra EV3-program for behandling av dem. Navn på postkassene følger: x og y - joystick 1, w og z - joystick 2, a og b - joystick 3, c og d - joystick 4.
Programmet har som standard en innstilling for bare en av roboten - EV3-forskeren », som du kan se på videoen. Du kan sette sammen EV3-forsker fra et pedagogisk sett av LEGO Mindstorms EV3 (45544). Last ned linkforskerens byggekretser : https://goo.gl/yPU4sa
Oppdatert
Sikkerhet starter med en forståelse av hvordan utviklere samler inn og deler dataene dine. Fremgangsmåtene for personvern og datasikkerhet kan variere basert på bruk, region og alder. Utvikleren har oppgitt denne informasjonen og kan oppdatere den over tid.

Ingen data deles med tredjeparter
Finn ut mer om hvordan utviklere deklarerer deling

Ingen data samles inn
Finn ut mer om hvordan utviklere deklarerer innsamling
Nyheter
Version 1.4.4
Fixed a lack of the menu for Add and Delete buttons on Android 7.
Version 1.4.3
Fixed an error while changing the screen orientation in Android 6 and later.
Version 1.4.2
Added local controls.
Version 1.3.1
Added a support for nonstandard platforms like Arduino and Raspberry Pi.
Version 1.2
1. Added a control via a keyboard (to update "Researcher EV3" settings you need to delete them first!!!).
2. Added an ability to run your EV3 program.
Fixed a lack of the menu for Add and Delete buttons on Android 7.
Version 1.4.3
Fixed an error while changing the screen orientation in Android 6 and later.
Version 1.4.2
Added local controls.
Version 1.3.1
Added a support for nonstandard platforms like Arduino and Raspberry Pi.
Version 1.2
1. Added a control via a keyboard (to update "Researcher EV3" settings you need to delete them first!!!).
2. Added an ability to run your EV3 program.