

RoboCam
包含廣告

4.0star
142 則評論
10K+
次下載

所有人
info



關於此應用程式
使用RoboCam,你可以FPV控制你自己的LEGO Mindstorms EV3,Android或Raspberry Pi机器人。
快速入门指南(仅适用于拥有LEGO Mindstorms EV3(45544)教育套件的人员):
1.组装研究员EV3(说明:https://goo.gl/yPU4sa),将其打开并确保蓝牙正常工作。
2.在智能手机(以下简称“电话1”)上安装RoboCam应用程序。
3.打开电话1的蓝牙,确保通过蓝牙连接电话1和EV3(必须配对)。
4.将用于控制机器人的电话1和智能手机(以下称为电话2)连接到同一Wi-Fi路由器。
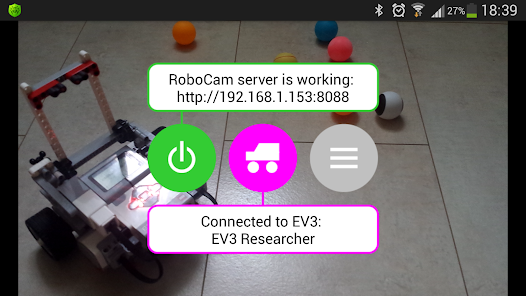
5.启动RoboCam服务器。为此,按下左侧的绿色按钮。
6.将电话1连接到机器人。为此,在中间按下洋红色按钮。
7.在手机2上打开谷歌浏览器,然后转到手机1上RoboCam应用程序中显示的链接。
8.登录电话2(默认使用admin和123)。
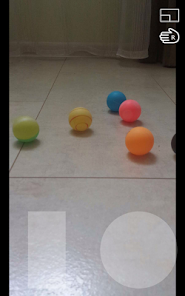
9.在电话2上出现两个操纵杆和来自电话1的摄像头的视频。锁定电话并将其连接到机器人。
10.现在您可以通过电话2控制您的机器人。
如果你有LEGO Mindstorms EV3(31313)的家用套件,或者你想控制其他EV3机器人而不是Researcher EV3,你需要设置RoboCam应用程序。请参阅RoboCam设置。
要使用该应用程序,您需要了解两件事:如何设置连接以及控件如何发生。
这是设置标准连接的快速手册。需要:EV3机器人,安装了RoboCam的Android智能手机(以下称为Phone 1)和智能手机或平板电脑(Android,iOS或Windows)以及支持HTML5的现代浏览器(以下简称电话2)。电话1通过蓝牙连接到EV3(设备必须预先配对!)。在电话1上启动RoboCam服务器并将电话1和电话2连接到同一个WiFi路由器后,您可以通过浏览器(从电话2)连接到RoboCam服务器(到电话1)。为此,您需要将地址写入将在RoboCam中显示的浏览器地址字段中,例如,http://192.168.1.2:8088
这是控制如何发生的简要描述。通过Phone 2的浏览器连接到RoboCam服务器并进入RoboCam Web应用程序后,您将看到Phone 1的摄像头看到的所有内容。将手机1连接到机器人,使其摄像头朝前。电话2上的Web应用程序可以有1到4个操纵杆来控制机器人,具体取决于设置。当您触摸操纵杆时,触摸点的坐标将传输到电话1上的RoboCam应用程序,然后根据操纵杆设置将它们转换为EV3电机命令或发送到EV3邮箱。如果坐标发送到邮箱,则需要编写一个额外的EV3程序来处理它们。邮箱的名称如下:x和y - 操纵杆1,w和z - 操纵杆2,a和b - 操纵杆3,c和d - 操纵杆4。
默认情况下,应用程序只能设置一个机器人 - “EV3研究员”,您可以在视频中看到。您可以从LEGO Mindstorms EV3(45544)的教育套件中组装EV3研究员。下载链接研究员的构建电路:https://goo.gl/yPU4sa
快速入门指南(仅适用于拥有LEGO Mindstorms EV3(45544)教育套件的人员):
1.组装研究员EV3(说明:https://goo.gl/yPU4sa),将其打开并确保蓝牙正常工作。
2.在智能手机(以下简称“电话1”)上安装RoboCam应用程序。
3.打开电话1的蓝牙,确保通过蓝牙连接电话1和EV3(必须配对)。
4.将用于控制机器人的电话1和智能手机(以下称为电话2)连接到同一Wi-Fi路由器。
5.启动RoboCam服务器。为此,按下左侧的绿色按钮。
6.将电话1连接到机器人。为此,在中间按下洋红色按钮。
7.在手机2上打开谷歌浏览器,然后转到手机1上RoboCam应用程序中显示的链接。
8.登录电话2(默认使用admin和123)。
9.在电话2上出现两个操纵杆和来自电话1的摄像头的视频。锁定电话并将其连接到机器人。
10.现在您可以通过电话2控制您的机器人。
如果你有LEGO Mindstorms EV3(31313)的家用套件,或者你想控制其他EV3机器人而不是Researcher EV3,你需要设置RoboCam应用程序。请参阅RoboCam设置。
要使用该应用程序,您需要了解两件事:如何设置连接以及控件如何发生。
这是设置标准连接的快速手册。需要:EV3机器人,安装了RoboCam的Android智能手机(以下称为Phone 1)和智能手机或平板电脑(Android,iOS或Windows)以及支持HTML5的现代浏览器(以下简称电话2)。电话1通过蓝牙连接到EV3(设备必须预先配对!)。在电话1上启动RoboCam服务器并将电话1和电话2连接到同一个WiFi路由器后,您可以通过浏览器(从电话2)连接到RoboCam服务器(到电话1)。为此,您需要将地址写入将在RoboCam中显示的浏览器地址字段中,例如,http://192.168.1.2:8088
这是控制如何发生的简要描述。通过Phone 2的浏览器连接到RoboCam服务器并进入RoboCam Web应用程序后,您将看到Phone 1的摄像头看到的所有内容。将手机1连接到机器人,使其摄像头朝前。电话2上的Web应用程序可以有1到4个操纵杆来控制机器人,具体取决于设置。当您触摸操纵杆时,触摸点的坐标将传输到电话1上的RoboCam应用程序,然后根据操纵杆设置将它们转换为EV3电机命令或发送到EV3邮箱。如果坐标发送到邮箱,则需要编写一个额外的EV3程序来处理它们。邮箱的名称如下:x和y - 操纵杆1,w和z - 操纵杆2,a和b - 操纵杆3,c和d - 操纵杆4。
默认情况下,应用程序只能设置一个机器人 - “EV3研究员”,您可以在视频中看到。您可以从LEGO Mindstorms EV3(45544)的教育套件中组装EV3研究员。下载链接研究员的构建电路:https://goo.gl/yPU4sa
更新日期


最新動向
Version 1.4.4
Fixed a lack of the menu for Add and Delete buttons on Android 7.
Version 1.4.3
Fixed an error while changing the screen orientation in Android 6 and later.
Version 1.4.2
Added local controls.
Version 1.3.1
Added a support for nonstandard platforms like Arduino and Raspberry Pi.
Version 1.2
1. Added a control via a keyboard (to update "Researcher EV3" settings you need to delete them first!!!).
2. Added an ability to run your EV3 program.
Fixed a lack of the menu for Add and Delete buttons on Android 7.
Version 1.4.3
Fixed an error while changing the screen orientation in Android 6 and later.
Version 1.4.2
Added local controls.
Version 1.3.1
Added a support for nonstandard platforms like Arduino and Raspberry Pi.
Version 1.2
1. Added a control via a keyboard (to update "Researcher EV3" settings you need to delete them first!!!).
2. Added an ability to run your EV3 program.