
Quadcopter FX Simulator
Sovelluksensisäisiä ostoksia

4,0star
23,4 t. arvostelua
1 milj.+
latausta

Kaikki
info








Tietoa pelistä
Quadcopter / monipyörijä RC Drone simulaattori First Person View (FPV), HUD, Return Home, kurssi Lock, Home lukko, Camera Tukilaakerin, Acro tilassa, Acro 3D-tilassa ja enemmän ..
Nyt Google Pahvi VR on myös tuettu mukaansatempaavaa purjehtii ja FPV kokemus.
Tuki Ohjaimet
Huomaa, että tämä simulaattori ja ei peli. Se on suunniteltu RC harrastajat harjoitella Flying taitoja.
Basic Tutorial aloittelijoille on edellä kuvattu video.
Pienin Näytön tarkkuus tarvitaan on 800 x 480 px. Pienin Suositeltava RAM on 1 Gt. Olemme avoimia ehdotuksia ja ongelmia. Voit aina lähettää meille sähköpostia meidän tuen sähköposti.
Ominaisuudet:
1) Perustuu todellisiin fysiikan malli Quadcopter
2) Interaktiivinen valikoima erilaisia kameroita liikennemuotojen:
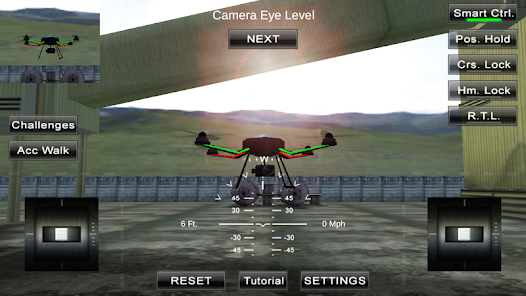
* Eye tasolla Camera
* Ensimmäisen persoonan View Camera
* Vakaa Käynnistäkää Camera
* Seuraa Camera
Voit kävellä lentäessään, katsot quad joko vetämällä keskelle näytön tai mahdollistamalla kiihtyvyysanturi painiketta vasemmalla puolella Eye tason Kameratila ..
3) Paluu Location (RTL)
Kun on Quad automaattisesti tuotto ja Land takaisin sen Landing kantaan. Se kytkeytyy automaattisesti päälle, kun Quad menee ulkopuolella.
4) Position Hold
Kun ON Quad yrittää Hold asemaansa, kun molemmat ohjaus tikkuja vapautetaan.
5) kurssi Lock
Kun ON eteenpäin, taaksepäin, vasen ja oikea pysyvät samana riippumatta suunta Quad. esim. Moving Oikea sauva eteenpäin on aina Quad mennä eteenpäin Itä suuntaan, vaikka se osoittaa kohti pohjoista.
6) Koti lukko
Kun ON Eteenpäin on aina poissa teiltä ja taaksepäin aina itseesi riippumatta neloset Suunta.
7) Huomio Display (HUD)
Näyttäminen reaaliaikainen Pitch, Roll, otsikko, Korkeus ja nopeus.
8) Säädettävä Ohjaus herkkyys asetukset
9) Auto Stabilizing säädettävissä
10) Korkeus lukituskytkimen
Jos ON quad yrittää säilyttää korkeuden, kun se oli päällä.
11) Lisäasetukset
Jos käytössä käyttäjät voivat vaihtaa Total Paino, staattinen / dynaaminen työntövoiman, PID-asetus ja ilmanvastus arvoja.
12) Useita Quad / Valotusohjelma / Jotkut perus haasteet Time Pass ..
13) Useita -tilassa Input Support.
Nyt se tukee Mode1, Mode2. MODE3, MODE4 ja kiihtyvyysanturit. Voit muuttaa asetusten kautta sivulla
14) Kameran kierto FPV ja Tukilaakerin kamera.
Napsauta ja vedä keskustasta näytön FPV tai Tukilaakerin kameraa. Tuplaklikkaa keskustassa nollata.
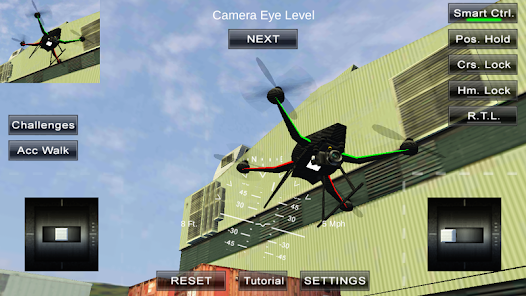
15) Dynamic Wind
Tuuli vaikutus vähentää, kun rakennuksen takana.
16) Google pahvia Tuki mukaansatempaavaa virtuaalitodellisuus ja FPV kokemus.
Varmista, että sinulla on ohjain kiinnitetään laitteeseen, sillä ainoa tapa, jolla voit hallita quadcopter on säätimen kerran pahvi VR on käytössä. Kun olet ottanut joudut katselemaan painikkeita UI ja paina laukaisinta painiketta pahvi napsauttaa sitä. Kun olet purjehtii painamalla liipaisinta tahansa avaa asetukset sivun. Voit koskettaa myös ruudulla missään toteuttaa laukaisutapahtuman sijaan liipaisinta painamalla painiketta.
17) Max Kallistuskulma / Auto vakauttaa Herkkyys Slider
Normal-tilassa liukusäädintä muuttaa Maximum Tiltin kallistuskulma ympäristössä. Tämä asetukset määrittää suurimman rullan / pituuskallistumakulma quadcopter kallistuu. Urheilu-tilassa se muuttaa Auto vakauttaa herkkyys. Korkeampi asetukset enemmän voimaa kohdistetaan vakauttamiseksi quadcopter.
18) Acro / Acro 3d tilassa asiantuntija purjehtii
Auto vakauttamiseksi ei sovelleta näissä tiloissa. Sinun täytyy olla asiantuntija lentää tällä mode.In 3D-tila on tila, jossa Quadcopter voi lentää ylösalaisin myös. Kaasuläpän tikkuja tuottaa kääntää työntövoimaa siirrettäessä alas keskiasennossa.
Nauti Flying ..
Laajuus: Jotkut Arteria sisältö on käytössä.
Nyt Google Pahvi VR on myös tuettu mukaansatempaavaa purjehtii ja FPV kokemus.
Tuki Ohjaimet
Huomaa, että tämä simulaattori ja ei peli. Se on suunniteltu RC harrastajat harjoitella Flying taitoja.
Basic Tutorial aloittelijoille on edellä kuvattu video.
Pienin Näytön tarkkuus tarvitaan on 800 x 480 px. Pienin Suositeltava RAM on 1 Gt. Olemme avoimia ehdotuksia ja ongelmia. Voit aina lähettää meille sähköpostia meidän tuen sähköposti.
Ominaisuudet:
1) Perustuu todellisiin fysiikan malli Quadcopter
2) Interaktiivinen valikoima erilaisia kameroita liikennemuotojen:
* Eye tasolla Camera
* Ensimmäisen persoonan View Camera
* Vakaa Käynnistäkää Camera
* Seuraa Camera
Voit kävellä lentäessään, katsot quad joko vetämällä keskelle näytön tai mahdollistamalla kiihtyvyysanturi painiketta vasemmalla puolella Eye tason Kameratila ..
3) Paluu Location (RTL)
Kun on Quad automaattisesti tuotto ja Land takaisin sen Landing kantaan. Se kytkeytyy automaattisesti päälle, kun Quad menee ulkopuolella.
4) Position Hold
Kun ON Quad yrittää Hold asemaansa, kun molemmat ohjaus tikkuja vapautetaan.
5) kurssi Lock
Kun ON eteenpäin, taaksepäin, vasen ja oikea pysyvät samana riippumatta suunta Quad. esim. Moving Oikea sauva eteenpäin on aina Quad mennä eteenpäin Itä suuntaan, vaikka se osoittaa kohti pohjoista.
6) Koti lukko
Kun ON Eteenpäin on aina poissa teiltä ja taaksepäin aina itseesi riippumatta neloset Suunta.
7) Huomio Display (HUD)
Näyttäminen reaaliaikainen Pitch, Roll, otsikko, Korkeus ja nopeus.
8) Säädettävä Ohjaus herkkyys asetukset
9) Auto Stabilizing säädettävissä
10) Korkeus lukituskytkimen
Jos ON quad yrittää säilyttää korkeuden, kun se oli päällä.
11) Lisäasetukset
Jos käytössä käyttäjät voivat vaihtaa Total Paino, staattinen / dynaaminen työntövoiman, PID-asetus ja ilmanvastus arvoja.
12) Useita Quad / Valotusohjelma / Jotkut perus haasteet Time Pass ..
13) Useita -tilassa Input Support.
Nyt se tukee Mode1, Mode2. MODE3, MODE4 ja kiihtyvyysanturit. Voit muuttaa asetusten kautta sivulla
14) Kameran kierto FPV ja Tukilaakerin kamera.
Napsauta ja vedä keskustasta näytön FPV tai Tukilaakerin kameraa. Tuplaklikkaa keskustassa nollata.
15) Dynamic Wind
Tuuli vaikutus vähentää, kun rakennuksen takana.
16) Google pahvia Tuki mukaansatempaavaa virtuaalitodellisuus ja FPV kokemus.
Varmista, että sinulla on ohjain kiinnitetään laitteeseen, sillä ainoa tapa, jolla voit hallita quadcopter on säätimen kerran pahvi VR on käytössä. Kun olet ottanut joudut katselemaan painikkeita UI ja paina laukaisinta painiketta pahvi napsauttaa sitä. Kun olet purjehtii painamalla liipaisinta tahansa avaa asetukset sivun. Voit koskettaa myös ruudulla missään toteuttaa laukaisutapahtuman sijaan liipaisinta painamalla painiketta.
17) Max Kallistuskulma / Auto vakauttaa Herkkyys Slider
Normal-tilassa liukusäädintä muuttaa Maximum Tiltin kallistuskulma ympäristössä. Tämä asetukset määrittää suurimman rullan / pituuskallistumakulma quadcopter kallistuu. Urheilu-tilassa se muuttaa Auto vakauttaa herkkyys. Korkeampi asetukset enemmän voimaa kohdistetaan vakauttamiseksi quadcopter.
18) Acro / Acro 3d tilassa asiantuntija purjehtii
Auto vakauttamiseksi ei sovelleta näissä tiloissa. Sinun täytyy olla asiantuntija lentää tällä mode.In 3D-tila on tila, jossa Quadcopter voi lentää ylösalaisin myös. Kaasuläpän tikkuja tuottaa kääntää työntövoimaa siirrettäessä alas keskiasennossa.
Nauti Flying ..
Laajuus: Jotkut Arteria sisältö on käytössä.
Päivitetty
Turvallisuus alkaa siitä, että ymmärrät, miten kehittäjät keräävät ja jakavat dataasi. Datan yksityisyys- ja turvallisuuskäytännöt saattavat vaihdella käytön, alueen ja iän mukaan. Kehittäjä on antanut nämä tiedot ja saattaa päivittää niitä myöhemmin.


Arviot ja arvostelut
4,0
19,7 t. arvostelua

Googlen käyttäjä
- Merkitse sopimattomaksi
7. lokakuuta 2019
Haastava.😎
Arvostelusta oli hyötyä yhdelle henkilölle
Googlen käyttäjä
- Merkitse sopimattomaksi
7. elokuuta 2017
Loistava
Arvostelusta oli hyötyä 3 henkilölle
Googlen käyttäjä
- Merkitse sopimattomaksi
14. syyskuuta 2014
THE MORE MORE COPTERS TO FREE VERSION
Sovelluksen tuki
Tietoa kehittäjästä
3D CREATIVE WORLD
prabhjot.s@3dcreativeworld.com
First Floor, D 96, Village Munirka
New Delhi, Delhi 110067
India
+91 88022 88868





