
Quadcopter FX Simulator
इन-ऐप्लिकेशन खरीदारी

4.0star
23.4 हज़ार समीक्षाएं
10 लाख+
डाउनलोड

सभी
info








इस गेम के बारे में जानकारी
फर्स्ट पर्सन व्यू (FPV), HUD, रिटर्न होम, कोर्स लॉक, होम लॉक, कैमरा गिम्बल, एक्रो मोड, एक्रो 3D मोड और बहुत कुछ के साथ एक क्वाडकॉप्टर / मल्टीरोटर RC ड्रोन सिम्युलेटर।
अब इमर्सिव फ़्लाइंग और FPV अनुभव के लिए Google कार्डबोर्ड VR भी समर्थित है।
कंट्रोलर्स के लिए समर्थन
कृपया ध्यान दें कि यह एक सिम्युलेटर है और कोई गेम नहीं है। इसे RC उत्साही लोगों के लिए फ़्लाइंग कौशल का अभ्यास करने के लिए डिज़ाइन किया गया है।
शुरुआती के लिए बुनियादी ट्यूटोरियल ऊपर दिए गए विवरण वीडियो में है।
आवश्यक न्यूनतम स्क्रीन रिज़ॉल्यूशन 800 x 480 px है। न्यूनतम अनुशंसित RAM 1 GB है। हम सुझावों और समस्याओं के लिए खुले हैं। आप हमेशा हमारे समर्थन ईमेल पर हमें ईमेल कर सकते हैं।
विशेषताएं:
1) क्वाडकॉप्टर का वास्तविक भौतिकी मॉडल पर आधारित
2) विभिन्न कैमरा मोड का इंटरैक्टिव चयन:
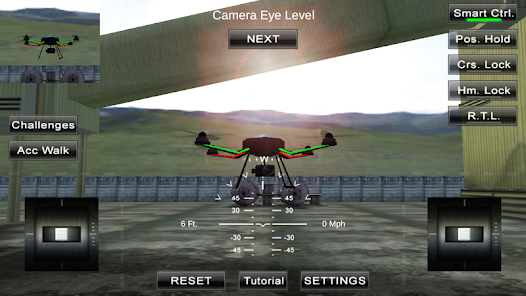
* आई लेवल कैमरा
* फर्स्ट पर्सन व्यू कैमरा
* स्थिर जिम्बल कैमरा
* फॉलो कैमरा
आप उड़ते समय क्वाड को देखते हुए घूम सकते हैं, या तो स्क्रीन के बीच में खींचकर या आई लेवल कैमरा मोड में बाईं ओर एक्सेलेरोमीटर बटन को सक्षम करके।
3) लोकेशन पर वापसी (RTL)
जब क्वाड चालू होगा तो यह अपने आप वापस लौटेगा और अपनी लैंडिंग पोजीशन में वापस आ जाएगा। जब क्वाड रेंज से बाहर चला जाएगा तो यह अपने आप चालू हो जाएगा।
4) पोजीशन होल्ड
जब क्वाड चालू होगा तो यह अपनी पोजीशन को होल्ड करने की कोशिश करेगा जब दोनों कंट्रोल स्टिक रिलीज़ होंगी।
5) कोर्स लॉक
जब क्वाड चालू होगा तो आगे, पीछे, बाएँ और दाएँ एक ही रहेंगे, चाहे क्वाड का ओरिएंटेशन कुछ भी हो। उदाहरण के लिए, दाएँ स्टिक को आगे की ओर ले जाने से क्वाड हमेशा पूर्व दिशा में आगे बढ़ेगा, भले ही वह उत्तर की ओर इशारा कर रहा हो।
6) होम लॉक
जब चालू होता है तो आगे की ओर हमेशा आपसे दूर रहेगा और पीछे की ओर हमेशा आपकी ओर रहेगा, चाहे क्वाड्स ओरिएंटेशन कुछ भी हो।
7) हेड्स अप डिस्प्ले (HUD)
रियल-टाइम पिच, रोल, हेडिंग, ऊंचाई और गति प्रदर्शित करना।
8) एडजस्टेबल कंट्रोल सेंसिटिविटी सेटिंग्स
9) ऑटो स्टेबिलाइज़िंग एडजस्टेबल
10) ऊंचाई होल्ड स्विच
अगर चालू है तो क्वाड स्विच ऑन होने पर ऊंचाई बनाए रखने की कोशिश करेगा।
11) एडवांस्ड सेटिंग्स
अगर सक्षम है तो उपयोगकर्ता कुल वजन, स्टेटिक / डायनेमिक थ्रस्ट, PID सेटिंग और एरोडायनामिक ड्रैग वैल्यू बदल सकते हैं।
12) मल्टीपल क्वाड / सीन सिलेक्शन / टाइम पास के लिए कुछ बुनियादी चुनौतियाँ..
13) मल्टीपल मोड इनपुट सपोर्ट।
अब यह मोड1, मोड2, मोड3, मोड4 और एक्सेलेरोमीटर को सपोर्ट करता है। आप सेटिंग पेज के ज़रिए बदल सकते हैं
14) FPV और जिम्बल कैमरे में कैमरा रोटेशन।
FPV या जिम्बल कैमरे पर स्क्रीन के बीच से क्लिक करें और ड्रैग करें। रीसेट करने के लिए बीच में डबल क्लिक करें।
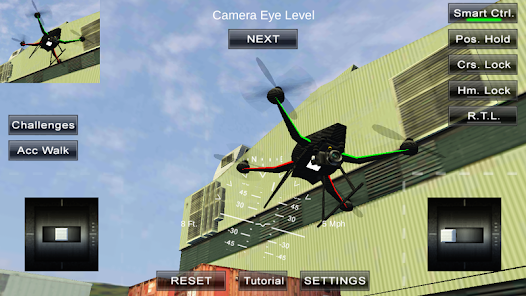
15) डायनेमिक विंड
बिल्डिंग के पीछे होने पर हवा का प्रभाव कम हो जाएगा।
16) इमर्सिव वर्चुअल रियलिटी और FPV अनुभव के लिए Google कार्डबोर्ड समर्थन।
सुनिश्चित करें कि आपके पास डिवाइस से जुड़ा एक कंट्रोलर है क्योंकि कार्डबोर्ड VR सक्षम होने के बाद आप केवल कंट्रोलर के ज़रिए ही क्वाडकॉप्टर को नियंत्रित कर सकते हैं। सक्षम करने के बाद आपको UI पर बटनों को देखना होगा और इसे क्लिक करने के लिए कार्डबोर्ड पर ट्रिगर बटन दबाना होगा। एक बार जब आप उड़ रहे होते हैं तो ट्रिगर को कहीं भी दबाने पर सेटिंग पेज खुल जाएगा। आप ट्रिगर बटन दबाने के बजाय ट्रिगर इवेंट को निष्पादित करने के लिए स्क्रीन पर कहीं भी टच कर सकते हैं।
17) अधिकतम झुकाव कोण / ऑटो स्थिर संवेदनशीलता स्लाइडर
सामान्य मोड में स्लाइडर अधिकतम झुकाव कोण सेटिंग को बदलता है। यह सेटिंग क्वाडकॉप्टर को झुकाने के लिए अधिकतम रोल / पिच कोण निर्धारित करती है। स्पोर्ट्स मोड में यह ऑटो स्थिर संवेदनशीलता को बदलता है। सेटिंग जितनी अधिक होगी क्वाडकॉप्टर को स्थिर करने के लिए उतना ही अधिक बल लगाया जाएगा।
18) विशेषज्ञ उड़ान के लिए एक्रो / एक्रो 3डी मोड
इन मोड में ऑटो स्टेबिलाइज़ेशन लागू नहीं होगा। इस मोड में उड़ान भरने के लिए आपको विशेषज्ञ होना चाहिए। 3डी मोड में एक ऐसा मोड है जिसमें क्वाडकॉप्टर उल्टा भी उड़ सकता है। केंद्र की स्थिति से नीचे ले जाने पर थ्रॉटल स्टिक रिवर्स थ्रस्ट उत्पन्न करेगा।
उड़ान का आनंद लें..
क्रेडिट: कुछ आर्टेरिया सामग्री उपयोग में है।
अब इमर्सिव फ़्लाइंग और FPV अनुभव के लिए Google कार्डबोर्ड VR भी समर्थित है।
कंट्रोलर्स के लिए समर्थन
कृपया ध्यान दें कि यह एक सिम्युलेटर है और कोई गेम नहीं है। इसे RC उत्साही लोगों के लिए फ़्लाइंग कौशल का अभ्यास करने के लिए डिज़ाइन किया गया है।
शुरुआती के लिए बुनियादी ट्यूटोरियल ऊपर दिए गए विवरण वीडियो में है।
आवश्यक न्यूनतम स्क्रीन रिज़ॉल्यूशन 800 x 480 px है। न्यूनतम अनुशंसित RAM 1 GB है। हम सुझावों और समस्याओं के लिए खुले हैं। आप हमेशा हमारे समर्थन ईमेल पर हमें ईमेल कर सकते हैं।
विशेषताएं:
1) क्वाडकॉप्टर का वास्तविक भौतिकी मॉडल पर आधारित
2) विभिन्न कैमरा मोड का इंटरैक्टिव चयन:
* आई लेवल कैमरा
* फर्स्ट पर्सन व्यू कैमरा
* स्थिर जिम्बल कैमरा
* फॉलो कैमरा
आप उड़ते समय क्वाड को देखते हुए घूम सकते हैं, या तो स्क्रीन के बीच में खींचकर या आई लेवल कैमरा मोड में बाईं ओर एक्सेलेरोमीटर बटन को सक्षम करके।
3) लोकेशन पर वापसी (RTL)
जब क्वाड चालू होगा तो यह अपने आप वापस लौटेगा और अपनी लैंडिंग पोजीशन में वापस आ जाएगा। जब क्वाड रेंज से बाहर चला जाएगा तो यह अपने आप चालू हो जाएगा।
4) पोजीशन होल्ड
जब क्वाड चालू होगा तो यह अपनी पोजीशन को होल्ड करने की कोशिश करेगा जब दोनों कंट्रोल स्टिक रिलीज़ होंगी।
5) कोर्स लॉक
जब क्वाड चालू होगा तो आगे, पीछे, बाएँ और दाएँ एक ही रहेंगे, चाहे क्वाड का ओरिएंटेशन कुछ भी हो। उदाहरण के लिए, दाएँ स्टिक को आगे की ओर ले जाने से क्वाड हमेशा पूर्व दिशा में आगे बढ़ेगा, भले ही वह उत्तर की ओर इशारा कर रहा हो।
6) होम लॉक
जब चालू होता है तो आगे की ओर हमेशा आपसे दूर रहेगा और पीछे की ओर हमेशा आपकी ओर रहेगा, चाहे क्वाड्स ओरिएंटेशन कुछ भी हो।
7) हेड्स अप डिस्प्ले (HUD)
रियल-टाइम पिच, रोल, हेडिंग, ऊंचाई और गति प्रदर्शित करना।
8) एडजस्टेबल कंट्रोल सेंसिटिविटी सेटिंग्स
9) ऑटो स्टेबिलाइज़िंग एडजस्टेबल
10) ऊंचाई होल्ड स्विच
अगर चालू है तो क्वाड स्विच ऑन होने पर ऊंचाई बनाए रखने की कोशिश करेगा।
11) एडवांस्ड सेटिंग्स
अगर सक्षम है तो उपयोगकर्ता कुल वजन, स्टेटिक / डायनेमिक थ्रस्ट, PID सेटिंग और एरोडायनामिक ड्रैग वैल्यू बदल सकते हैं।
12) मल्टीपल क्वाड / सीन सिलेक्शन / टाइम पास के लिए कुछ बुनियादी चुनौतियाँ..
13) मल्टीपल मोड इनपुट सपोर्ट।
अब यह मोड1, मोड2, मोड3, मोड4 और एक्सेलेरोमीटर को सपोर्ट करता है। आप सेटिंग पेज के ज़रिए बदल सकते हैं
14) FPV और जिम्बल कैमरे में कैमरा रोटेशन।
FPV या जिम्बल कैमरे पर स्क्रीन के बीच से क्लिक करें और ड्रैग करें। रीसेट करने के लिए बीच में डबल क्लिक करें।
15) डायनेमिक विंड
बिल्डिंग के पीछे होने पर हवा का प्रभाव कम हो जाएगा।
16) इमर्सिव वर्चुअल रियलिटी और FPV अनुभव के लिए Google कार्डबोर्ड समर्थन।
सुनिश्चित करें कि आपके पास डिवाइस से जुड़ा एक कंट्रोलर है क्योंकि कार्डबोर्ड VR सक्षम होने के बाद आप केवल कंट्रोलर के ज़रिए ही क्वाडकॉप्टर को नियंत्रित कर सकते हैं। सक्षम करने के बाद आपको UI पर बटनों को देखना होगा और इसे क्लिक करने के लिए कार्डबोर्ड पर ट्रिगर बटन दबाना होगा। एक बार जब आप उड़ रहे होते हैं तो ट्रिगर को कहीं भी दबाने पर सेटिंग पेज खुल जाएगा। आप ट्रिगर बटन दबाने के बजाय ट्रिगर इवेंट को निष्पादित करने के लिए स्क्रीन पर कहीं भी टच कर सकते हैं।
17) अधिकतम झुकाव कोण / ऑटो स्थिर संवेदनशीलता स्लाइडर
सामान्य मोड में स्लाइडर अधिकतम झुकाव कोण सेटिंग को बदलता है। यह सेटिंग क्वाडकॉप्टर को झुकाने के लिए अधिकतम रोल / पिच कोण निर्धारित करती है। स्पोर्ट्स मोड में यह ऑटो स्थिर संवेदनशीलता को बदलता है। सेटिंग जितनी अधिक होगी क्वाडकॉप्टर को स्थिर करने के लिए उतना ही अधिक बल लगाया जाएगा।
18) विशेषज्ञ उड़ान के लिए एक्रो / एक्रो 3डी मोड
इन मोड में ऑटो स्टेबिलाइज़ेशन लागू नहीं होगा। इस मोड में उड़ान भरने के लिए आपको विशेषज्ञ होना चाहिए। 3डी मोड में एक ऐसा मोड है जिसमें क्वाडकॉप्टर उल्टा भी उड़ सकता है। केंद्र की स्थिति से नीचे ले जाने पर थ्रॉटल स्टिक रिवर्स थ्रस्ट उत्पन्न करेगा।
उड़ान का आनंद लें..
क्रेडिट: कुछ आर्टेरिया सामग्री उपयोग में है।
पिछली बार अपडेट होने की तारीख
डेटा सुरक्षा के लिहाज़ से यह जानना बेहद अहम है कि डेवलपर, आपका डेटा कैसे इकट्ठा और शेयर करते हैं. डेटा को निजी और सुरक्षित रखने के अलग-अलग तरीके हो सकते हैं. ये आपकी जगह, उम्र, और ऐप्लिकेशन के इस्तेमाल के हिसाब से तय किए जाते हैं. यह जानकारी डेवलपर से मिली है और वह समय-समय पर इसमें अपडेट भी कर सकता है.

तीसरे पक्षों के साथ कोई डेटा शेयर नहीं किया जाता
डेवलपर किस तरह से आपका डेटा शेयर करते हैं, इस बारे में ज़्यादा जानें

कोई डेटा इकट्ठा नहीं किया गया
डेवलपर किस तरह से आपका डेटा इकट्ठा करते हैं, इस बारे में ज़्यादा जानें
रेटिंग और समीक्षाएं
4.0
19.7 हज़ार समीक्षाएं

Raj Sisodiya
- ध्यान दिलाएं कि यह गलत है
20 मई 2023
Mast
2 लोगों को यह समीक्षा काम की लगी

Bharat Jakhar
- ध्यान दिलाएं कि यह गलत है
- समीक्षा का इतिहास दिखाएं
21 अप्रैल 2023
Offline
1 व्यक्ति को यह समीक्षा काम की लगी

Google उपयोगकर्ता
- ध्यान दिलाएं कि यह गलत है
- समीक्षा का इतिहास दिखाएं
28 अप्रैल 2018
Super
5 लोगों को यह समीक्षा काम की लगी
ऐप्लिकेशन से जुड़ी सहायता
डेवलपर के बारे में
3D CREATIVE WORLD
prabhjot.s@3dcreativeworld.com
First Floor, D 96, Village Munirka
New Delhi, Delhi 110067
India
+91 88022 88868





