
Quadcopter FX Simulator
ಆ್ಯಪ್ನಲ್ಲಿನ ಖರೀದಿಗಳು

4.0star
23.4ಸಾ ವಿಮರ್ಶೆಗಳು
1ಮಿ+
ಡೌನ್ಲೋಡ್ಗಳು

ಪ್ರತಿಯೊಬ್ಬರು
info








ಈ ಆಟದ ಕುರಿತು
ಮೊದಲ ವ್ಯಕ್ತಿ ವೀಕ್ಷಿಸಿ (FPV), HUD, ರಿಟರ್ನ್ ಮುಖಪುಟ, ಕೋರ್ಸ್ ಲಾಕ್, ಮುಖಪುಟ ಲಾಕ್, ಕ್ಯಾಮೆರಾ Gimbal, ಆಕ್ರೊ ಮೋಡ್, ಆಕ್ರೊ 3D ಕ್ರಮದಲ್ಲಿ ಮತ್ತು ಹೆಚ್ಚು ಒಂದು Quadcopter / Multirotor ಆರ್ಸಿ ಡ್ರೋನ್ ಸಿಮ್ಯುಲೇಟರ್ ..
ಈಗ ಗೂಗಲ್ ರಟ್ಟಿನ ವಿಆರ್ ಸಹ ಮುಳುಗಿಸುವ ಹಾರುವ ಮತ್ತು FPV ಅನುಭವಕ್ಕಾಗಿ ಬೆಂಬಲಿತವಾಗಿದೆ.
ನಿಯಂತ್ರಕಗಳಿಗೆ ಬೆಂಬಲ
ದಯವಿಟ್ಟು ಗಮನಿಸಿ ಈ ಒಂದು ಸಿಮ್ಯುಲೇಟರ್ ಮತ್ತು ಒಂದು ಆಟ ಎಂದು. ಇದು ಹಾರುವ ಕೌಶಲ್ಯಗಳನ್ನು ಅಭ್ಯಾಸ ಮಾಡಲು ಆರ್ಸಿ ಉತ್ಸಾಹಿಗಳಿಗೆ ವಿನ್ಯಾಸ ಇದೆ.
ಹರಿಕಾರ ಬೇಸಿಕ್ ಟ್ಯುಟೋರಿಯಲ್ ಮೇಲಿನ ವಿವರಣೆ ವೀಡಿಯೊ ಆಗಿದೆ.
ಕನಿಷ್ಠ ಸ್ಕ್ರೀನ್ ರೆಸಲ್ಯೂಶನ್ 800 X 480 px ಆಗಿರುತ್ತದೆ ಆಗಿದೆ. ಕನಿಷ್ಠ ಶಿಫಾರಸು ರಾಮ್ 1 GB. ನಾವು ಸಲಹೆಗಳು ಮತ್ತು ಸಮಸ್ಯೆಗಳನ್ನು ಮುಕ್ತವಾಗಿದೆ. ನೀವು ಯಾವಾಗಲೂ ನಮ್ಮ ಇಮೇಲ್ ನಮಗೆ ಇಮೇಲ್ ಮಾಡಬಹುದು.
ವೈಶಿಷ್ಟ್ಯಗಳು:
1) Quadcopter ನೈಜ ಭೌತಶಾಸ್ತ್ರ ಮಾದರಿ ಆಧರಿಸಿ
ವಿವಿಧ ಕ್ಯಾಮೆರಾಗಳು ವಿಧಾನಗಳ 2) ಪರಸ್ಪರ ಆಯ್ಕೆ:
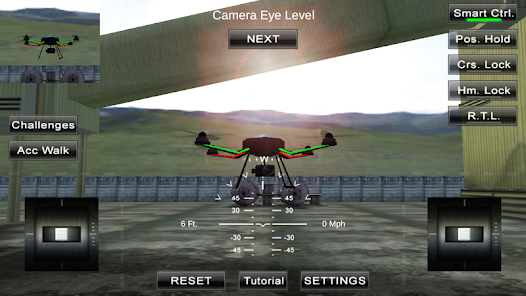
* ಐ ಮಟ್ಟದ ಕ್ಯಾಮೆರಾ
* ಮೊದಲ ವ್ಯಕ್ತಿ ವ್ಯೂ ಕ್ಯಾಮೆರಾ
* ಸ್ಟೆಬಿಲೈಸ್ಡ್ Gimbal ಕ್ಯಾಮೆರಾ
* ಅನುಸರಿಸಿ ಕ್ಯಾಮೆರಾ
ತೆರೆಯ ಮಧ್ಯದಲ್ಲಿ ಎಳೆಯುವುದರ ಮೂಲಕ ಅಥವಾ ಐ ಮಟ್ಟದ ಕ್ಯಾಮೆರಾ ಕ್ರಮದಲ್ಲಿ ಎಡಭಾಗದಲ್ಲಿ ಅಕ್ಸೆಲೆರೊಮೀಟರ್ ಬಟನ್ ಒದಗಿಸುವ ಮೂಲಕ ಎರಡೂ ಕ್ವಾಡ್ ನೋಡುವ, ಹಾರಾಡಿ ನೀವು ಅಡ್ಡಿಮಾಡುವುದರ ಮಾಡಬಹುದು ..
ಸ್ಥಾನ 3) ರಿಟರ್ನ್ (ಆರ್ಟಿಎಲ್)
ಯಾವಾಗ ಕ್ವಾಡ್ ಸ್ವಯಂಚಾಲಿತವಾಗಿ ಹಿಂತಿರುಗಿ ಮತ್ತು ಜಮೀನು ಮರಳಿ ತನ್ನ ಲ್ಯಾಂಡಿಂಗ್ ಸ್ಥಾನದಲ್ಲಿ ಮಾಡುತ್ತದೆ. ಇದು ಸ್ವಯಂಚಾಲಿತವಾಗಿ ಕ್ವಾಡ್ ವ್ಯಾಪ್ತಿಯ ಹೊರಗೆ ಹೋದಾಗ ಮೇಲೆ ಬದಲಾಯಿಸಲ್ಪಡುತ್ತವೆ.
4) ಸ್ಥಾನದಲ್ಲಿವೆ
ಯಾವಾಗ ಕ್ವಾಡ್ ಎರಡೂ ನಿಯಂತ್ರಣ ಸ್ಟಿಕ್ ಬಿಡುಗಡೆ ಮಾಡಿದಾಗ ಅದರ ಸ್ಥಾನವನ್ನು ಹೋಲ್ಡ್ ಪ್ರಯತ್ನಿಸಿ.
5) ಕೋರ್ಸ್ ಲಾಕ್
ಯಾವಾಗ ಮುಂದೆ ರಂದು, ಹಿಂದುಳಿದ, ಎಡ ಮತ್ತು ಬಲ ಲೆಕ್ಕಿಸದೆ ಕ್ವಾಡ್ ದೃಷ್ಟಿಕೋನ ಅದೇ ಉಳಿಯುತ್ತದೆ. ಉದಾಹರಣೆಗೆ: ಚಲಿಸುವ ಬಲ ಸ್ಟಿಕ್ ಫಾರ್ವರ್ಡ್ ಯಾವಾಗಲೂ ಕ್ವಾಡ್ ಉತ್ತರದಲ್ಲಿ ಕಡೆಗೆ ತೋರಿಸುವ ಸಹ ಪೂರ್ವ ದಿಕ್ಕಿನಲ್ಲಿ ಮುಂದೆ ಹೋಗಿ ಮಾಡುತ್ತದೆ.
6) ಮುಖಪುಟ ಲಾಕ್
ಯಾವಾಗ ಫಾರ್ವರ್ಡ್ ಯಾವಾಗಲೂ ನಿಮ್ಮಿಂದ ಇರುತ್ತದೆ ಮತ್ತು ಹಿಂದಕ್ಕೆ ಯಾವಾಗಲೂ ಇರಲಿ ಕ್ವಾಡ್ಗಳೊಂದಿಗೆ ದೃಷ್ಟಿಕೋನ ನೀವು ಕಡೆಗೆ ಇರುತ್ತದೆ.
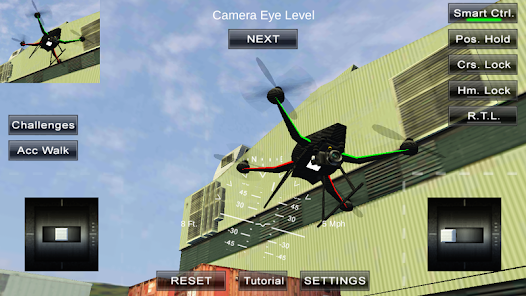
7) ಪ್ರದರ್ಶನ ಅಪ್ ಮೊಕದ್ದಮೆ (HUD)
ನಿಜಾವಧಿಯ ಪಿಚ್, ರೋಲ್, ಶಿರೋನಾಮೆ, ಎತ್ತರ ಮತ್ತು ವೇಗದ ಪ್ರದರ್ಶಿಸುತ್ತದೆ.
8) ಹೊಂದಾಣಿಕೆ ಕಂಟ್ರೋಲ್ ಸಂವೇದನೆ ಸೆಟ್ಟಿಂಗ್ಗಳು
9) ಆಟೋ ಹೊಂದಾಣಿಕೆ ದೃಢತೆಯ
10) ಎತ್ತರ ಹೋಲ್ಡ್ ಸ್ವಿಚ್
ಕ್ವಾಡ್ ಅದು ಸ್ವಿಚ್ ಯಾವಾಗ ಎತ್ತರವನ್ನು ಕಾಯ್ದುಕೊಳ್ಳುತ್ತದೆ ಪ್ರಯತ್ನಿಸಿ.
11) ಸುಧಾರಿತ ಸೆಟ್ಟಿಂಗ್ಗಳು
ಬಳಕೆದಾರರು ಒಟ್ಟು ತೂಕ, ಸ್ಥಾಯೀ / ಡೈನಮಿಕ್ ಒತ್ತಡ, PID ಸೆಟ್ಟಿಂಗ್ ಮತ್ತು ಗಾಳಿಚಾಲನಾಶಕ್ತಿ ಮೌಲ್ಯಗಳು ಮಾರ್ಪಡುತ್ತದೆ.
12) ಬಹು ಕ್ವಾಡ್ / ದೃಶ್ಯ ಆಯ್ಕೆ / ಕಾಲವನ್ನು ಕೆಲವು ಮೂಲಭೂತ ಸವಾಲುಗಳು ..
13) ಬಹು ಕ್ರಮದಲ್ಲಿ ಇನ್ಪುಟ್ ಬೆಂಬಲ.
ಈಗ mode1, mode2 ಬೆಂಬಲಿಸುತ್ತದೆ. mode3, mode4 ಮತ್ತು ವೇಗೋತ್ಕರ್ಷಕ. ನೀವು ಸೆಟ್ಟಿಂಗ್ಗಳನ್ನು ಪುಟ ಮೂಲಕ ಬದಲಾಯಿಸಬಹುದು
FPV ಮತ್ತು Gimbal ಕ್ಯಾಮೆರಾ 14) ಕ್ಯಾಮೆರಾ ಸರದಿ.
ಕ್ಲಿಕ್ ಮಾಡಿ ಮತ್ತು FPV ಅಥವಾ Gimbal ಕ್ಯಾಮೆರಾ ಪರದೆಯ ಕೇಂದ್ರದಿಂದ ಎಳೆಯಿರಿ. ಕೇಂದ್ರದಲ್ಲಿ ಮರುಹೊಂದಿಸಲು ಡಬಲ್ ಕ್ಲಿಕ್ ಮಾಡಿ.
15) ಡೈನಾಮಿಕ್ ವಿಂಡ್
ಯಾವಾಗ ಕಟ್ಟಡದ ಹಿಂದೆ ವಿಂಡ್ ಪರಿಣಾಮವನ್ನು ಕಡಿಮೆ ಮಾಡುತ್ತದೆ.
ಮುಳುಗಿಸುವ ವಾಸ್ತವತೆಗೆ ಮತ್ತು FPV ಅನುಭವಕ್ಕಾಗಿ 16) ಗೂಗಲ್ ರಟ್ಟಿನ ಬೆಂಬಲ.
ರಟ್ಟಿನ ವಿಆರ್ ಲಭ್ಯವಾದಾಗ ನೀವು quadcopter ನಿಯಂತ್ರಿಸಲು ಮಾತ್ರ ರೀತಿಯಲ್ಲಿ ನಿಯಂತ್ರಕ ಏಕೆಂದರೆ ಸಾಧನ ಅಂಟಿಕೊಂಡಿರುವ ನಿಯಂತ್ರಕ ಎಂದು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಿ. ಅನುವು ನಂತರ ನೀವು UI ಗಳ ಮೇಲೆ ಗುಂಡಿಗಳು ನೋಡುತ್ತಲಿರುತ್ತಿದ್ದನು ಮತ್ತು ಕ್ಲಿಕ್ ಹಲಗೆಯ ಮೇಲೆ ಪ್ರಚೋದಕ ಬಟನ್ ಒತ್ತಿ ಹೊಂದಿರುತ್ತವೆ. ನೀವು ಸೆಟ್ಟಿಂಗ್ಗಳನ್ನು ಪುಟ ತೆರೆಯುತ್ತದೆ ನಗರದಲ್ಲಿ ಟ್ರಿಗರ್ ಒತ್ತಿ ನಂತರ ಹಾರುವ ಒಮ್ಮೆ. ನೀವು ಪ್ರಚೋದಕ ಗುಂಡಿಯನ್ನು ಒತ್ತುವ ಬದಲು ಪ್ರಚೋದಕ ಕ್ರಿಯೆಯನ್ನು ಕಾರ್ಯಗತಗೊಳಿಸಲು ನಗರದಲ್ಲಿ ತೆರೆಯಲ್ಲಿ ಮುಟ್ಟಲು ಸಾಧ್ಯ.
17) ಮ್ಯಾಕ್ಸ್ ಟಿಲ್ಟ್ ಕೋನ / ಆಟೋ ಸೂಕ್ಷ್ಮತೆ ಸ್ಲೈಡರ್ ಸ್ಥಿರಗೊಳಿಸಲು
ಸಾಮಾನ್ಯ ಕ್ರಮದಲ್ಲಿ ಸ್ಲೈಡರ್ ಗರಿಷ್ಠ ಟಿಲ್ಟ್ ಕೋನ ಸನ್ನಿವೇಶ ಜರುಗುತ್ತದೆ. ಇದರರ್ಥ ಸಂಯೋಜನೆಗಳು quadcopter ಓರೆಯಾಗಿಸದ ಗರಿಷ್ಠ ರೋಲ್ / ಪಿಚ್ ಕೋನ ನಿರ್ಧರಿಸುತ್ತದೆ. ಕ್ರೀಡೆ ಕ್ರಮದ ಆಟೋ ಸಂವೇದನೆ ಸ್ಥಿರಗೊಳಿಸಲು ಬದಲಾಯಿಸುತ್ತದೆ. ಹೆಚ್ಚಿನ ಸೆಟ್ಟಿಂಗ್ಗಳನ್ನು ಹೆಚ್ಚಿನ ಶಕ್ತಿ quadcopter ಸ್ಥಿರಗೊಳಿಸಲು ಅನ್ವಯಿಸಲಾಗುತ್ತದೆ.
ತಜ್ಞ ಹಾರುವ 18) ಆಕ್ರೊ / ಆಕ್ರೊ 3 ಮೋಡ್
ಆಟೋ ಈ ವಿಧಾನಗಳಲ್ಲಿ ಅನ್ವಯಿಸಲಾಗುವುದಿಲ್ಲ ಸ್ಥಿರಗೊಳಿಸಲು. ಈ mode.In 3D ಮೋಡ್ ಹಾರಲು ತಜ್ಞ ಅಗತ್ಯವಿದೆ Quadcopter ಕೂಡ ತಲೆಕೆಳಗಾಗಿ ಹಾರಬಲ್ಲವು ಇದರಲ್ಲಿ ವಿಧಾನವಾಗಿದೆ. ಮಧ್ಯ್ಠ ಕೆಳಗೆ ಸರಿದವು ಥ್ರೊಟಲ್ ತುಂಡುಗಳು ಉತ್ಪಾದಿಸಲು ಒತ್ತಡ ಬದಲಾಯಿಸುವಂತೆ.
ಫ್ಲೈಯಿಂಗ್ ಆನಂದಿಸಿ ..
ಕ್ರೆಡಿಟ್ಸ್ ಕೆಲವು ಅಪಧಮನಿಯ ವಿಷಯ ಬಳಕೆಯಲ್ಲಿದೆ.
ಈಗ ಗೂಗಲ್ ರಟ್ಟಿನ ವಿಆರ್ ಸಹ ಮುಳುಗಿಸುವ ಹಾರುವ ಮತ್ತು FPV ಅನುಭವಕ್ಕಾಗಿ ಬೆಂಬಲಿತವಾಗಿದೆ.
ನಿಯಂತ್ರಕಗಳಿಗೆ ಬೆಂಬಲ
ದಯವಿಟ್ಟು ಗಮನಿಸಿ ಈ ಒಂದು ಸಿಮ್ಯುಲೇಟರ್ ಮತ್ತು ಒಂದು ಆಟ ಎಂದು. ಇದು ಹಾರುವ ಕೌಶಲ್ಯಗಳನ್ನು ಅಭ್ಯಾಸ ಮಾಡಲು ಆರ್ಸಿ ಉತ್ಸಾಹಿಗಳಿಗೆ ವಿನ್ಯಾಸ ಇದೆ.
ಹರಿಕಾರ ಬೇಸಿಕ್ ಟ್ಯುಟೋರಿಯಲ್ ಮೇಲಿನ ವಿವರಣೆ ವೀಡಿಯೊ ಆಗಿದೆ.
ಕನಿಷ್ಠ ಸ್ಕ್ರೀನ್ ರೆಸಲ್ಯೂಶನ್ 800 X 480 px ಆಗಿರುತ್ತದೆ ಆಗಿದೆ. ಕನಿಷ್ಠ ಶಿಫಾರಸು ರಾಮ್ 1 GB. ನಾವು ಸಲಹೆಗಳು ಮತ್ತು ಸಮಸ್ಯೆಗಳನ್ನು ಮುಕ್ತವಾಗಿದೆ. ನೀವು ಯಾವಾಗಲೂ ನಮ್ಮ ಇಮೇಲ್ ನಮಗೆ ಇಮೇಲ್ ಮಾಡಬಹುದು.
ವೈಶಿಷ್ಟ್ಯಗಳು:
1) Quadcopter ನೈಜ ಭೌತಶಾಸ್ತ್ರ ಮಾದರಿ ಆಧರಿಸಿ
ವಿವಿಧ ಕ್ಯಾಮೆರಾಗಳು ವಿಧಾನಗಳ 2) ಪರಸ್ಪರ ಆಯ್ಕೆ:
* ಐ ಮಟ್ಟದ ಕ್ಯಾಮೆರಾ
* ಮೊದಲ ವ್ಯಕ್ತಿ ವ್ಯೂ ಕ್ಯಾಮೆರಾ
* ಸ್ಟೆಬಿಲೈಸ್ಡ್ Gimbal ಕ್ಯಾಮೆರಾ
* ಅನುಸರಿಸಿ ಕ್ಯಾಮೆರಾ
ತೆರೆಯ ಮಧ್ಯದಲ್ಲಿ ಎಳೆಯುವುದರ ಮೂಲಕ ಅಥವಾ ಐ ಮಟ್ಟದ ಕ್ಯಾಮೆರಾ ಕ್ರಮದಲ್ಲಿ ಎಡಭಾಗದಲ್ಲಿ ಅಕ್ಸೆಲೆರೊಮೀಟರ್ ಬಟನ್ ಒದಗಿಸುವ ಮೂಲಕ ಎರಡೂ ಕ್ವಾಡ್ ನೋಡುವ, ಹಾರಾಡಿ ನೀವು ಅಡ್ಡಿಮಾಡುವುದರ ಮಾಡಬಹುದು ..
ಸ್ಥಾನ 3) ರಿಟರ್ನ್ (ಆರ್ಟಿಎಲ್)
ಯಾವಾಗ ಕ್ವಾಡ್ ಸ್ವಯಂಚಾಲಿತವಾಗಿ ಹಿಂತಿರುಗಿ ಮತ್ತು ಜಮೀನು ಮರಳಿ ತನ್ನ ಲ್ಯಾಂಡಿಂಗ್ ಸ್ಥಾನದಲ್ಲಿ ಮಾಡುತ್ತದೆ. ಇದು ಸ್ವಯಂಚಾಲಿತವಾಗಿ ಕ್ವಾಡ್ ವ್ಯಾಪ್ತಿಯ ಹೊರಗೆ ಹೋದಾಗ ಮೇಲೆ ಬದಲಾಯಿಸಲ್ಪಡುತ್ತವೆ.
4) ಸ್ಥಾನದಲ್ಲಿವೆ
ಯಾವಾಗ ಕ್ವಾಡ್ ಎರಡೂ ನಿಯಂತ್ರಣ ಸ್ಟಿಕ್ ಬಿಡುಗಡೆ ಮಾಡಿದಾಗ ಅದರ ಸ್ಥಾನವನ್ನು ಹೋಲ್ಡ್ ಪ್ರಯತ್ನಿಸಿ.
5) ಕೋರ್ಸ್ ಲಾಕ್
ಯಾವಾಗ ಮುಂದೆ ರಂದು, ಹಿಂದುಳಿದ, ಎಡ ಮತ್ತು ಬಲ ಲೆಕ್ಕಿಸದೆ ಕ್ವಾಡ್ ದೃಷ್ಟಿಕೋನ ಅದೇ ಉಳಿಯುತ್ತದೆ. ಉದಾಹರಣೆಗೆ: ಚಲಿಸುವ ಬಲ ಸ್ಟಿಕ್ ಫಾರ್ವರ್ಡ್ ಯಾವಾಗಲೂ ಕ್ವಾಡ್ ಉತ್ತರದಲ್ಲಿ ಕಡೆಗೆ ತೋರಿಸುವ ಸಹ ಪೂರ್ವ ದಿಕ್ಕಿನಲ್ಲಿ ಮುಂದೆ ಹೋಗಿ ಮಾಡುತ್ತದೆ.
6) ಮುಖಪುಟ ಲಾಕ್
ಯಾವಾಗ ಫಾರ್ವರ್ಡ್ ಯಾವಾಗಲೂ ನಿಮ್ಮಿಂದ ಇರುತ್ತದೆ ಮತ್ತು ಹಿಂದಕ್ಕೆ ಯಾವಾಗಲೂ ಇರಲಿ ಕ್ವಾಡ್ಗಳೊಂದಿಗೆ ದೃಷ್ಟಿಕೋನ ನೀವು ಕಡೆಗೆ ಇರುತ್ತದೆ.
7) ಪ್ರದರ್ಶನ ಅಪ್ ಮೊಕದ್ದಮೆ (HUD)
ನಿಜಾವಧಿಯ ಪಿಚ್, ರೋಲ್, ಶಿರೋನಾಮೆ, ಎತ್ತರ ಮತ್ತು ವೇಗದ ಪ್ರದರ್ಶಿಸುತ್ತದೆ.
8) ಹೊಂದಾಣಿಕೆ ಕಂಟ್ರೋಲ್ ಸಂವೇದನೆ ಸೆಟ್ಟಿಂಗ್ಗಳು
9) ಆಟೋ ಹೊಂದಾಣಿಕೆ ದೃಢತೆಯ
10) ಎತ್ತರ ಹೋಲ್ಡ್ ಸ್ವಿಚ್
ಕ್ವಾಡ್ ಅದು ಸ್ವಿಚ್ ಯಾವಾಗ ಎತ್ತರವನ್ನು ಕಾಯ್ದುಕೊಳ್ಳುತ್ತದೆ ಪ್ರಯತ್ನಿಸಿ.
11) ಸುಧಾರಿತ ಸೆಟ್ಟಿಂಗ್ಗಳು
ಬಳಕೆದಾರರು ಒಟ್ಟು ತೂಕ, ಸ್ಥಾಯೀ / ಡೈನಮಿಕ್ ಒತ್ತಡ, PID ಸೆಟ್ಟಿಂಗ್ ಮತ್ತು ಗಾಳಿಚಾಲನಾಶಕ್ತಿ ಮೌಲ್ಯಗಳು ಮಾರ್ಪಡುತ್ತದೆ.
12) ಬಹು ಕ್ವಾಡ್ / ದೃಶ್ಯ ಆಯ್ಕೆ / ಕಾಲವನ್ನು ಕೆಲವು ಮೂಲಭೂತ ಸವಾಲುಗಳು ..
13) ಬಹು ಕ್ರಮದಲ್ಲಿ ಇನ್ಪುಟ್ ಬೆಂಬಲ.
ಈಗ mode1, mode2 ಬೆಂಬಲಿಸುತ್ತದೆ. mode3, mode4 ಮತ್ತು ವೇಗೋತ್ಕರ್ಷಕ. ನೀವು ಸೆಟ್ಟಿಂಗ್ಗಳನ್ನು ಪುಟ ಮೂಲಕ ಬದಲಾಯಿಸಬಹುದು
FPV ಮತ್ತು Gimbal ಕ್ಯಾಮೆರಾ 14) ಕ್ಯಾಮೆರಾ ಸರದಿ.
ಕ್ಲಿಕ್ ಮಾಡಿ ಮತ್ತು FPV ಅಥವಾ Gimbal ಕ್ಯಾಮೆರಾ ಪರದೆಯ ಕೇಂದ್ರದಿಂದ ಎಳೆಯಿರಿ. ಕೇಂದ್ರದಲ್ಲಿ ಮರುಹೊಂದಿಸಲು ಡಬಲ್ ಕ್ಲಿಕ್ ಮಾಡಿ.
15) ಡೈನಾಮಿಕ್ ವಿಂಡ್
ಯಾವಾಗ ಕಟ್ಟಡದ ಹಿಂದೆ ವಿಂಡ್ ಪರಿಣಾಮವನ್ನು ಕಡಿಮೆ ಮಾಡುತ್ತದೆ.
ಮುಳುಗಿಸುವ ವಾಸ್ತವತೆಗೆ ಮತ್ತು FPV ಅನುಭವಕ್ಕಾಗಿ 16) ಗೂಗಲ್ ರಟ್ಟಿನ ಬೆಂಬಲ.
ರಟ್ಟಿನ ವಿಆರ್ ಲಭ್ಯವಾದಾಗ ನೀವು quadcopter ನಿಯಂತ್ರಿಸಲು ಮಾತ್ರ ರೀತಿಯಲ್ಲಿ ನಿಯಂತ್ರಕ ಏಕೆಂದರೆ ಸಾಧನ ಅಂಟಿಕೊಂಡಿರುವ ನಿಯಂತ್ರಕ ಎಂದು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಿ. ಅನುವು ನಂತರ ನೀವು UI ಗಳ ಮೇಲೆ ಗುಂಡಿಗಳು ನೋಡುತ್ತಲಿರುತ್ತಿದ್ದನು ಮತ್ತು ಕ್ಲಿಕ್ ಹಲಗೆಯ ಮೇಲೆ ಪ್ರಚೋದಕ ಬಟನ್ ಒತ್ತಿ ಹೊಂದಿರುತ್ತವೆ. ನೀವು ಸೆಟ್ಟಿಂಗ್ಗಳನ್ನು ಪುಟ ತೆರೆಯುತ್ತದೆ ನಗರದಲ್ಲಿ ಟ್ರಿಗರ್ ಒತ್ತಿ ನಂತರ ಹಾರುವ ಒಮ್ಮೆ. ನೀವು ಪ್ರಚೋದಕ ಗುಂಡಿಯನ್ನು ಒತ್ತುವ ಬದಲು ಪ್ರಚೋದಕ ಕ್ರಿಯೆಯನ್ನು ಕಾರ್ಯಗತಗೊಳಿಸಲು ನಗರದಲ್ಲಿ ತೆರೆಯಲ್ಲಿ ಮುಟ್ಟಲು ಸಾಧ್ಯ.
17) ಮ್ಯಾಕ್ಸ್ ಟಿಲ್ಟ್ ಕೋನ / ಆಟೋ ಸೂಕ್ಷ್ಮತೆ ಸ್ಲೈಡರ್ ಸ್ಥಿರಗೊಳಿಸಲು
ಸಾಮಾನ್ಯ ಕ್ರಮದಲ್ಲಿ ಸ್ಲೈಡರ್ ಗರಿಷ್ಠ ಟಿಲ್ಟ್ ಕೋನ ಸನ್ನಿವೇಶ ಜರುಗುತ್ತದೆ. ಇದರರ್ಥ ಸಂಯೋಜನೆಗಳು quadcopter ಓರೆಯಾಗಿಸದ ಗರಿಷ್ಠ ರೋಲ್ / ಪಿಚ್ ಕೋನ ನಿರ್ಧರಿಸುತ್ತದೆ. ಕ್ರೀಡೆ ಕ್ರಮದ ಆಟೋ ಸಂವೇದನೆ ಸ್ಥಿರಗೊಳಿಸಲು ಬದಲಾಯಿಸುತ್ತದೆ. ಹೆಚ್ಚಿನ ಸೆಟ್ಟಿಂಗ್ಗಳನ್ನು ಹೆಚ್ಚಿನ ಶಕ್ತಿ quadcopter ಸ್ಥಿರಗೊಳಿಸಲು ಅನ್ವಯಿಸಲಾಗುತ್ತದೆ.
ತಜ್ಞ ಹಾರುವ 18) ಆಕ್ರೊ / ಆಕ್ರೊ 3 ಮೋಡ್
ಆಟೋ ಈ ವಿಧಾನಗಳಲ್ಲಿ ಅನ್ವಯಿಸಲಾಗುವುದಿಲ್ಲ ಸ್ಥಿರಗೊಳಿಸಲು. ಈ mode.In 3D ಮೋಡ್ ಹಾರಲು ತಜ್ಞ ಅಗತ್ಯವಿದೆ Quadcopter ಕೂಡ ತಲೆಕೆಳಗಾಗಿ ಹಾರಬಲ್ಲವು ಇದರಲ್ಲಿ ವಿಧಾನವಾಗಿದೆ. ಮಧ್ಯ್ಠ ಕೆಳಗೆ ಸರಿದವು ಥ್ರೊಟಲ್ ತುಂಡುಗಳು ಉತ್ಪಾದಿಸಲು ಒತ್ತಡ ಬದಲಾಯಿಸುವಂತೆ.
ಫ್ಲೈಯಿಂಗ್ ಆನಂದಿಸಿ ..
ಕ್ರೆಡಿಟ್ಸ್ ಕೆಲವು ಅಪಧಮನಿಯ ವಿಷಯ ಬಳಕೆಯಲ್ಲಿದೆ.
ಅಪ್ಡೇಟ್ ದಿನಾಂಕ
ಸುರಕ್ಷತೆ ಎಂಬುದು ನಿಮ್ಮ ಡೇಟಾವನ್ನು ಡೆವಲಪರ್ಗಳು ಹೇಗೆ ಸಂಗ್ರಹಿಸುತ್ತಾರೆ ಮತ್ತು ಹಂಚಿಕೊಳ್ಳುತ್ತಾರೆ ಎಂಬುದನ್ನು ಅರ್ಥಮಾಡಿಕೊಳ್ಳುವುದರಿಂದ ಪ್ರಾರಂಭವಾಗುತ್ತದೆ. ನಿಮ್ಮ ಬಳಕೆ, ಪ್ರದೇಶ ಮತ್ತು ವಯಸ್ಸನ್ನು ಆಧರಿಸಿ ಡೇಟಾ ಗೌಪ್ಯತೆ ಮತ್ತು ಭದ್ರತಾ ಅಭ್ಯಾಸಗಳು ಬದಲಾಗಬಹುದು. ಡೆವಲಪರ್ ಈ ಮಾಹಿತಿಯನ್ನು ಒದಗಿಸಿದ್ದಾರೆ ಮತ್ತು ಕಾಲ ಕ್ರಮೇಣ ಇದನ್ನು ಅಪ್ಡೇಟ್ ಮಾಡಬಹುದು.

ಥರ್ಡ್ ಪಾರ್ಟಿಗಳ ಜೊತೆ ಯಾವುದೇ ಡೇಟಾವನ್ನು ಹಂಚಿಕೊಳ್ಳಲಾಗಿಲ್ಲ
ಡೆವಲಪರ್ಗಳು ಹಂಚಿಕೊಳ್ಳುವಿಕೆಯನ್ನು ಹೇಗೆ ಘೋಷಿಸುತ್ತಾರೆ ಎಂಬುದರ ಕುರಿತು ಇನ್ನಷ್ಟು ತಿಳಿಯಿರಿ

ಯಾವುದೇ ಡೇಟಾ ಸಂಗ್ರಹಿಸಲಾಗಿಲ್ಲ
ಡೆವಲಪರ್ಗಳು ಸಂಗ್ರಹಣೆಯನ್ನು ಹೇಗೆ ಘೋಷಿಸುತ್ತಾರೆ ಎಂಬುದರ ಕುರಿತು ಇನ್ನಷ್ಟು ತಿಳಿಯಿರಿ
ರೇಟಿಂಗ್ಗಳು ಮತ್ತು ಅಭಿಪ್ರಾಯಗಳು
4.0
19.7ಸಾ ವಿಮರ್ಶೆಗಳು
ಆ್ಯಪ್ ಬೆಂಬಲ
ಡೆವಲಪರ್ ಬಗ್ಗೆ
3D CREATIVE WORLD
prabhjot.s@3dcreativeworld.com
First Floor, D 96, Village Munirka
New Delhi, Delhi 110067
India
+91 88022 88868





